瓦楞纸箱板自动码垛机机械手设计初探
徐雪萌,张永宇,张映霞,徐云
(河南工业大学,郑州450007)
摘要:目的研究高效的、可集成于瓦楞纸箱生产线终端的瓦楞纸箱板自动码垛装置。方法方法通过对六自由度码垛机器人和机械式码垛装置进行研究,在分析其优缺点的基础上,结合企业的技术要求设计瓦楞纸箱板自动码垛装置。在设计方案中采用AHP 法,结合企业的要求和生产现场的状况,选择机械式码垛设计方案。结果结果确定了新型瓦楞纸板箱码垛成套装置设计方案,论述了其工作原理并讨论了关键装置的设计要点,对抓取机械手的结构和运动轨迹进行了分析与优化。结论结论该设计方案采用2个机械手分别完成单层码垛和整层抓取操作,设计合理,满足企业的使用要求。关键词:瓦楞纸板箱;码垛机;机械手中图分类号:TB486+.03
文献标识码:A
文章编号:1001-3563(2015)09-0082-04
Design of Manipulators for Corrugated Box Board Automatic Palletizing
System
XU Xue-meng ,ZHANG Yong-yu ,ZHANG Ying-xia ,XU Yun
(Henan University of Technology ,Zhengzhou 450007,China )
ABSTRACT :The aim of this work was to design an efficient automatic palletizing system which can be integrated to the end of the production line of corrugated box board.By studying on the 6DOF palletizing robot and mechanical palletizing machine,based on the analysis of their advantages and disadvantages,the automatic palletizing system of corrugated box board was designed according to the request of the company.The AHP method was adopted in the design scheme,and the mechanical palletizing design scheme was chosen based on the request of the company and the situation of the production site.The design scheme for the novel corrugated box board automatic palletizing system was determined,the working principle and design essentials of the key device were introduced,and the structure and trajectory of the crawling manipulators were analyzed and optimized.In conclusion,this design scheme adopted two manipulators for single-layer stacking and whole-layer crawling operations,respectively.The design was reasonable,meeting the requirements of the corrugated boxes company.
KEY WORDS :corrugated box board ;palletizing machine ;manipulator
收稿日期:2014-10-13
作者简介:徐雪萌(1972—),女,河南南阳人,硕士,河南工业大学副教授,主要研究方向为包装工程。
自动码垛机是将生产线上的产品按照一定的排列方式码放在托盘上,形成货运单元,便于适应机械化、大型化和高速化的现代物流操作。自动码垛机以其高速性、智能性、稳定性、可集成性等性能广泛应用于各种产品的生产线上,如食品饮料行业码垛、水泥自动装车码垛、工业品码垛等[1—3]。自动码垛机按智能化水平分为机器人码垛机和机械式码垛机[4—5]。瓦楞纸箱板自动码垛机是将完成纸板成形、印刷、模切、打
捆后的瓦楞纸箱板码放到托盘上,以解决人工码垛劳动强度大等问题,并提高工作效率。
1瓦楞纸箱板自动码垛机设计技术要求
1.1设计参数要求
郑州某纸箱制造企业提出的纸箱自动码垛机设
包装工程
PACKAGING ENGINEERING
82
第36卷第9期计参数要求:纸箱板的最小切长为488mm,最大切长为584mm;最小切宽为766mm,最大切宽为1114mm;纸箱板的最小面积为0.182m 2,最大面积为0.321m 2;每平方米质量最小值为0.43kg/m 2,最大值为0.56kg/m 2);每捆个数最少20个,最多50个;托盘尺寸的长×宽×高=1500mm×1500mm×250mm;码放速度为15~17捆/分;码放高度应≤1900mm。1.2纸箱板码垛机设计特点
分析设计参数可以看出,待设计的纸箱板自动码垛装置应具有的特点:码垛速度高,码垛一捆纸箱板的时间为3.5~4s;最大码放质量大,依据纸箱面积、定量和每捆的个数,单捆最大码放质量为18kg,考虑工作系数,设计最大码放质量为20kg,即机械手的公称抓取质量为20kg;一层四捆的码放质量为80kg;最大码放高度约为1900mm;设备可靠性好,纸箱板在码放过程中不能变形、破损;全自动码放、安全、经济、效率高。
2瓦楞纸箱板自动码垛机总体设计方案
2.1堆码方式的选择
产品在托盘上堆码的方式有4种:重叠式、交错式、纵横式和旋转式[6],各种堆码方式见图1,要求托盘表面的利用率不低于80%。在选择瓦楞纸箱板码垛方式时,要结合纸箱板自动码垛机的特点、托盘与产品的尺寸关系及不同码垛方式的特点。该机因码垛高度高、质量大,因此每层选择稳定性较好的旋转式,奇数层和偶数层选择交错跺的码垛方式。
2.2瓦楞纸箱板自动码垛机设计方案2.2.1设计方案的选择
自动码跺装置方案设计可以采用机器人码垛和机械式码垛(直角坐标机器人码垛)2种方案,设计方案采用AHP 法[7],从设备功能、工作性能、经济性、可靠
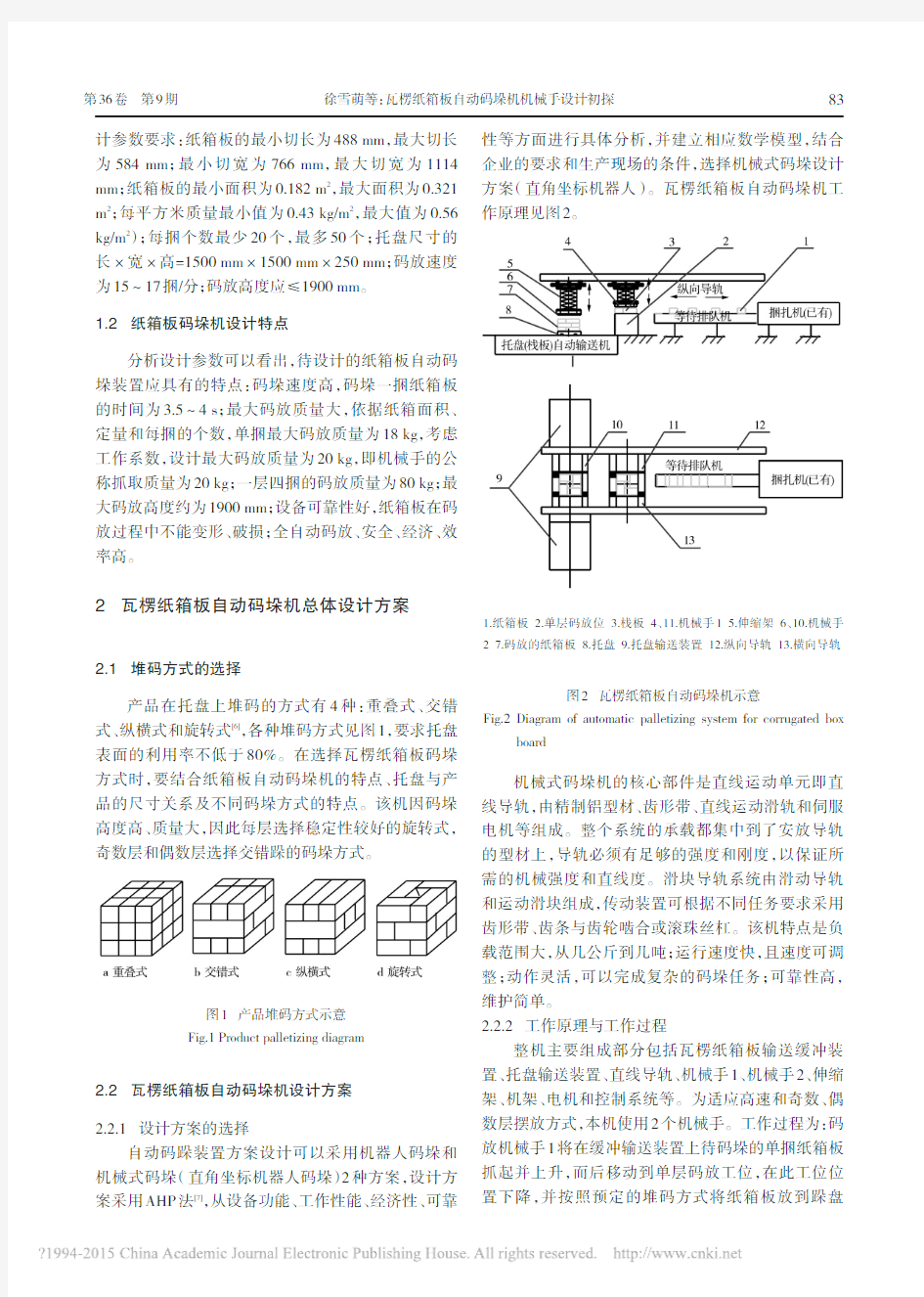
性等方面进行具体分析,并建立相应数学模型,结合企业的要求和生产现场的条件,选择机械式码垛设计方案(直角坐标机器人)。瓦楞纸箱板自动码垛机工作原理见图2。
机械式码垛机的核心部件是直线运动单元即直线导轨,由精制铝型材、齿形带、直线运动滑轨和伺服电机等组成。整个系统的承载都集中到了安放导轨的型材上,导轨必须有足够的强度和刚度,以保证所需的机械强度和直线度。滑块导轨系统由滑动导轨和运动滑块组成,传动装置可根据不同任务要求采用齿形带、齿条与齿轮啮合或滚珠丝杠。该机特点是负载范围大,从几公斤到几吨;运行速度快,且速度可调整;动作灵活,可以完成复杂的码垛任务;可靠性高,维护简单。
2.2.2工作原理与工作过程
整机主要组成部分包括瓦楞纸箱板输送缓冲装置、托盘输送装置、直线导轨、机械手1、机械手2、伸缩架、机架、电机和控制系统等。为适应高速和奇数、偶数层摆放方式,本机使用2个机械手。工作过程为:码放机械手1将在缓冲输送装置上待码垛的单捆纸箱板抓起并上升,而后移动到单层码放工位,在此工位位置下降,
并按照预定的堆码方式将纸箱板放到跺盘
图1产品堆码方式示意Fig.1Product palletizing
diagram
图2瓦楞纸箱板自动码垛机示意
Fig.2Diagram of automatic palletizing system for corrugated box
board
1.纸箱板
2.单层码放位
3.栈板4、11.机械手15.伸缩架6、10.机械手27.码放的纸箱板8.托盘9.托盘输送装置12.纵向导轨13.横向导轨
徐雪萌等:瓦楞纸箱板自动码垛机机械手设计初探83
2015年5月
上,循环4次,完成一层纸箱板的码垛。机械手2按照
旋转跺奇数层和偶数层的码垛规律,将机械手1码放
好的整层纸箱板码放在托盘上,直到规定的层数,完
成1次工作循环。该机如果只使用1个机械手,在技
术上有2个难点:奇数层和偶数层纸板的码放形式不
同,机械手完成奇数层和偶数层码放运动轨迹不同;
随着托盘上被码放纸板的层数增加,机械手在z轴方
向的向下运动(完成将纸板放在托盘上)的距离减
小。如果使用1个机械手,其运动复杂,将增加机械手
运动控制的难度。使用2个机械手可将复杂的运动简
单化,机械手1只完成将4捆纸箱板码放在跺盘上,每
次工作循环的运动轨迹相同;机械手2的运动满足奇数层和偶数层的码放要求,以及改变机械手z轴方向的运动距离以适应码放高度的变化。
文中码垛机码垛一捆纸板的时间约为3.5~4s,机械手1完成一个工艺循环所需的时间为14~16s,机械手2完成一个工艺循环的时间约为4s。依据企业车间预留的空间尺寸4m×3m×2m,可选择直线导轨的最大速度为3~5m/s,最大加速度为50~100 m/s2,来满足生产节拍的要求。
2.3瓦楞纸箱板自动码垛机设计要点
2.3.1码垛机械手类型选择和运动轨迹分析
常用的码垛机械手的类型分为夹托式、夹板式、真空吸盘和混合抓取等4种形式。夹托式机械手主要用于高速码垛,夹板式机械手用于箱盒的码垛,真空吸取式机械手利用真空吸盘码放,混合抓取机械手适合几个工位的协作码放。机械手的驱动方式有液压、气动和电动等3种方式。文中为防止纸箱板在码放过程中被划破或变形,采用夹托式手指形机械手,抓取时手指的位置应避开纸箱的切口位置。依据负载要求,该机的驱动装置采用电动和气动相结合的方式[8]。机械手1和机械手2均可采用类似的结构。瓦楞纸箱板码垛机械手结构示意见图3。
码垛机械手1为4自由度机械手,在码放过程中完成x,y,z轴移动和绕z轴旋转,z方向移动距离约为1.5m。x,y,z方向的移动由交流伺服电机提供动力,旋转可由驱动气缸带动,由PLC控制伺服电机和驱动气缸启停。由于抓取的质量较大,产生的运动惯量较大,所以运动中采用水平、垂直、旋转交替分开运动,以增加机械手的稳定性和协调性[9—10]。
为分析机械手1的运动轨迹,见图4,设O点为码垛机械手1的初始位置,以O为原点建立直角坐标系xOy,F点为主传送链上待抓取纸箱板的中心,码垛的跺盘放置于y轴上,A,B,C,D分别为跺盘上四捆纸箱板的中心,则机械手在完成一层四捆码垛过程中所运动的行程为S=x A+y A+x B+y B+x C+y C+x D+y D,(x A,x B,x C,x D分别为抓取过程中机械手1完成四捆纸箱板码垛沿x方向的行程,y A,y B,y C,y D分别为抓取过程中机械手1沿y方向的行程。)可以利用优化的方法,求出S的最小值,即机械手1的水平运动最优轨迹。利用最优轨迹设计可以减少机械手的运动行程,并且可以以此来确定单层码放工位和机械手1初始的最佳相对位置[11—13]。
码垛机械手2为按照要求实现整层码垛的目的,必须完成x,z方向的移动及旋转,并且z方向的移动范围较大,设计的移动最大距离约为2.2m,可以设计3或4个自由度。在设计时应对机械手2在z方向上的运动轨迹进行优化,以提高工作效率。
机械手在工作过程中受静应力和变应力的作用,因此设计时应对机械手进行静力和动态力的有限元分析[14],以检验机械手在结构强度、刚度上是否满足工作要求。机械手2的公称码放质量为80kg,应以轻量化为目标进行结构优化[15—16]。
2.3.2其他装置设计与选择
电机、直线导轨、气缸、
减速器等装置为标准件,
图3夹托式机械手示意
Fig.3Diagram of clamping
manipulator
图4机械手1工作行程
Fig.4Working stroke of manipulator1
84
第36卷第9期
在设计时依据参数计算选择相应的型号。文中伺服电机采用交流伺服电机,其结构简单、运行可靠,使用维修方便,也可以采用减速器和电机集成一体机。直线导轨选用铝合金材质,要求具有耐蚀性、组装容易、互换容易、运转平稳、低噪音等特点。控制装置应实现PC化、网络化设计,并采用多传感器融合技术[15]。
3结语
纸箱板自动码垛装置采用框架结构,4根立柱受力、结构合理。使用双机械手分别完成单层码放、整层抓取码垛工艺,动作协调平稳,满足码垛生产能力的需求。该设备适用高速、重载纸箱板码垛,设计尽量采用标准化的元件,便于互换、减低设备成本。
参考文献:
[1]李晓刚,刘晋浩.码垛机器人的研究与应用现状、问题及对
策[J].包装工程,2011,32(3):96—102.
LI Xiao-gang,LIU Jin-hao.The Study and Application Status of the Robot for Palletizing,Problems and Countermeasures[J].
Packaging Engineering,2011,32(3):96—102.
[2]赵堂春,黄敦华,杜均.灌装生产线码垛码垛机械手设计与
研究[J].机电产品开发与创新,2007(1):34—35.
ZHAO Tang-chun,HUANG Dun-hua,DU Jun.The Design and Research of Filling Line Stacking Arm Palletizing[J].De-velopment and Innovation of Mechanical and Electrical Prod-ucts,2007(1):34—35.
[3]胡洪国,高建华,杨汝清.码垛技术综述[J].组合机床与自
动化加工技术,2000(6):7—9.
HU Hong-guo,GAO Jian-hua,YANG Ru-qing.The Devel-opment of Palletizing Technology[J].Modular Machine Tool& Automatic Manufacturing Technique,2000(6):7—9.
[4]HEMMINGSON E.Palletizing Robots Industry[J].Industrial
Robot,1998,25(6):384—388.
[5]SORENTI P.Rapid Palletizing Simulation in the Fast Lane[J].
Industrial Robot,1996,23(3):16—19.
[6]彭国勋.物流包装运输系统[M].北京:印刷工业出版社,
2012.
PENG Guo-xun.Packaging Design of Logistics Transport[M].
Beijing:Printing Industry Press,2012.
[7]张吉军.层次分析法[J].模糊系统与数学,2000,14(2):
80—83.
ZHANG Ji-jun.Fuzzy Analytical Hierarchy Process[J].Fuzzy Systems and Mathmatics,2000,14(2):80—83.
[8]ARAKELIAN V,SARGSYAN S.On the Design of Serial Ma-
nipulators with Decoupled Dynamics[J].Mechatronics,2012(6):904—909.
[9]付铁,李金泉,陈恳,等.一种新型高速码垛机械手的设计
与实现[J].北京理工大学学报,2007,27(1):17—20.
FU Tie,LI Jin-quan,CHEN Ken,et al.Novel Design and Implementation of High Speed Palletizing Manipulator[J].
Journal of Beijing Institute of Technology,2007,27(1):17—
20.
[10]RETHMANN J,WANKE E.Stack up Algorithms for Palletiz-
ing at Delivery Industry[J].European Journal of Operational Research,2001,128(1):74—97.
[11]王建军.搬运机械手仿真设计和制作[J].机械设计与制造,
2012(9):146—148.
WANG Jian-jun.Simulation Design and Making for Carrying Manipulator[J].Mechnical Design and Making,2012(9):146—148.
[12]张有良.码垛机械手运动轨迹的研究[J].包装与食品机械,
2011(3):20—23.
ZHANG You-liang.The Research on Stacking Manipulator Movement Locus[J].Packaging and Food Machinery,2011(3):20—23.
[13]马占义,芮执元.一种新型铝锭码垛机械手的研究与设计
[J].新技术新工艺,2009(8):63—65.
MA Zhan-yi,RUI Zhi-yuan.Research and Design of a New Aluminum Ingot Stacking Robot Arm[J].New Technology and New Process,2009(8):63—65.
[14]付铁.新型码垛机械手动态载荷计算与选型[J].北京理工
大学学报,2008(1):24—26.
FU Tie.Dynamic Computation and Type-selection Design of Palletzing Manipularor[J].Transactions of Beijing Institute of Technology,2008(1):24—26.
[15]李金泉,段冰蕾,南倩.TH50型码垛机器人动态静力学分
析[J].北京科技大学学报,2011,30(4):504—505.
LI Jin-quan,DUAN Bing-lei,NAN Qian.Kincto-static Anal-ysis on a TH50Type Palletizing Robot[J].Journal University Science and Technology Beijing,2011,30(4):504—505. [16]SIMIONESCU I,LIVIU C.The Static Balancing of the Indus-
trial Robot Arms:Continuous Balancing[J].Mechanism and Machine Theory,2009,35(9):1299—1311.
徐雪萌等:瓦楞纸箱板自动码垛机机械手设计初探85
目录 第一章绪论 1.1 项目的技术背景与研究意义 1.2 取苗装置的国内外研究现状 1.2.1国外取苗装置的研究现状 1.2.2国内取苗装置的研究现状 1.3论文的研究目标与研究内容 1.4论文研究的技术路线 第二章穴盘苗自动移栽机机械手整机方案设计 2.1 穴盘苗自动移栽机机械手工作原理和结构分析2.2 利用UG建立样机模型 第三章穴盘苗自动移栽机取苗装置的结构设计 3.1 取苗机构的基本构成 基本结构 (1)机械手 (2)穴盘定位平台 (3)驱动系统 (4)控制系统 PLC程序 (5)底座 3.2 取苗机构的工作原理 第四章穴盘苗自动移栽机送苗装置的设计要求分析1穴盘育苗及穴盘的选择 2送苗装置的工作原理和结构组成 3送苗机构的控制系统 第五章取苗装置的实验研究 1.取苗装置影响因素分析 2影响取苗成功率的因素 3取苗装置手臂角度的实验分析
第六章总结与展望1 全文总结 2研究展望 结束语 参考文献 致谢
第一章绪论 1.1项目的技术背景与研究意义 随着社会进步和人民生活水平的提高,设施农业已成为国民经济中的支柱产业,温室蔬菜、花卉及棉花生产对发展农村经济,增加农民收入,丰富人民的菜篮子,改善人民生活具有举足轻重的作用。穴盘苗移栽是近年才兴起的种植新技术,它具有缩短生育期,提早成熟,提高棉花单产,具有广阔的推广前景。过去几年温室大棚育出成品苗向大田移栽,全部是靠人工移栽。穴盘苗自动移栽技术是温室蔬菜或花卉生产实现工厂化和自动化而采用的一种重要的种植方式。目前,国内穴盘苗移栽的取苗、喂苗环节主要靠手工完成,劳动强度大,作业效率低,不能满足规模化生产的需要,从而制约了蔬菜生产的发展。因此,研制开发适合我国国情、结构简单、价格低廉、性能稳定可靠的中小型穴盘苗自动移栽机迫在眉睫,而移栽机械手是温室穴盘苗移栽自动化的关键部分,能够完成“穴盘定位—自动送苗—钵苗抓取—钵苗投放”这一系列连续动作,其性能直接影响移栽机的移栽质量。穴盘苗移栽机械手的研究对实现实现温室穴盘苗移栽生产过程自动化、减轻穴盘苗移栽作业的劳动强度、提高作物移栽质量,推进我国温室农业作物生产机械化和自动化进程,特别是我国“十二五”农业发展规划的顺利实施具有重大意义。 1.2 取苗装置的国内外研究现状 国外穴盘苗移栽机取苗装置的技术较成熟,而且大部分机型开始投入使用,尤其是应用于花卉、蔬菜等经济价值高的作物的大面积移栽,具有很好的经济价值。国内的研究主要集中在各大高校及科研院所,且大部分的研究成果只是样机的试制,尚没有成型的机型投入生产应用。 1.2.1国外取苗装置研究现状 20 世纪初期部分国家开始出现移栽机具。三十年代出现移栽装置或移栽器代替人工取苗。五十年代移栽的生产技术研究,研制出了不同结构的半自动移栽机。八十年代,半自动移栽机已在欧美国家的农业生产中广泛被使用,培育穴盘苗、移栽作物等,实现了制造机械、播种机械、移栽机等各种机械配套使用。到90年代,有关部门加强从育苗到栽植整个系统的研究,使育苗和栽植有机地结合,研制出多种全自动移栽机,如日本90年代初将穴盘苗自动移栽机列为农业机械急需开发的项目,日本农机研究所联合三家农机公司,于1993年至1995年期间开发出了三种型号的全自动移栽机(图1-1~1-3),可移栽穴盘苗或纸钵苗,主要
1适用范围 本方案仅适用于青岛大炼油工程22万吨/硫磺回收装置硫磺全自动包 装码垛2条生产线施工。本方案如有与设备随机资料矛盾处,以设备 随机资料为准。 2编制依据 《机械设备安装工程施工及验收通用规范》GB50231-98 《压缩机、风机、泵安装工程施工及验收规范》GB50275-98 《通用机械设备安装工程》 《硫磺全自动包装码垛生产线》机械图册 《硫磺全自动包装码垛生产线》安装手册 3工程概况 全自动包装码垛机组位硫磺成型厂房一层内,2 个储料仓和1条皮 带运输机在二层标高9.180m,共计设备77台。 参数及规格如下:
4施工主要工序 4.1主要施工流程 包装机安装流程
码垛机安装流程 4.2施工主要步骤 4.2.1施工前准备 1)施工应具备的条件. a)土建工程已基本结束,施工现场达到“三通一平”。 b)设备基础已具备交安条件。 c)设备和随机资料到货齐全。 d)施工用料准备齐全。 2)施工人员经过安全,技术等培训合格。 3)施工现场备有必要的消防器材。 4)一般注意事项 a)现场安装人员必须佩戴适当的防护用品,如安全帽、工作服、手套、 安全鞋等。 b)安装现场必须有充足的照明。
c)安装用设备及工具准备,必须齐全、完好、可靠。禁止使用有裂纹、带毛刺、手柄松动的等不符合要求的工具。(具体见附表)d)起吊和搬运重手物,应遵守起重工安全操作技术规程。 e)登高作业应遵守高处作业的相关规定,工作前应检查梯子、脚手架是 否坚固可靠,禁止使用自制的梯子。工具必须放好,安全带应系挂好, 不准下扔东西。 f)采用梯子登高时要注意防滑措施,梯子斜度以75度为宜,必要时设人防护。 g)开动设备应先检查防护装置、紧固螺钉以及电、气、油等动力开关是否完好,在确保设备运行区内无人的前提下方可启动设备。 h)调试过程中应注意周围人员及自身安全,防止因挥动工具,工具脱落等造成伤害。多个人员一起工作要配合,保证安全。 4.2.2设备检验及验收管理 1)机器的开箱检验,由施工单位、建设单位及监理人员共同参加下,按照装箱单进行,内容包括: a)核对机器的名称、型号、规格、包装、箱号、箱数,并检查包装情况; b)检查随机技术文件及专用工具是否齐全;对主机、附属设备及零部件 进行外观质量检查,并核实零部件的品种、规格、数量等; c)检验后,应提交有签字的检验记录。 2)机器的零部件要编上标记(位号、件号)等。妥善保管易损件入库存放。 3)与机器配套的电气,仪表等设备及配件,应有各专业人员进行验收和保管。 4.2.3基础的验收 1)基础的验收应由土建、安装、监理三个单位的施工质量、技术等有关人员进行,主要检查内容有: a)基础的检测记录,提交一份与施工单位; b)基础上的标志线清楚(主要指纵横中心线、标高),尺寸与设计尺寸一 致,并与设备符合; c)基础表面清洁不得有露筋、?蜂窝、空洞、疏松层,以及二次抹面层 等; d)按有关土建基础图与机器技术文件,对基础尺寸及位置进行复测检 查,其允许偏差见下表:
龙源期刊网 https://www.doczj.com/doc/7310872574.html, 自动化生产线码垛搬运机械手设计研究 作者:黄婉娴 来源:《科学与财富》2018年第17期 摘要:搬运机械手在自动化生产线上是一个重要的自动化装置,本文针对传统生产线产 品生产自动化程度低、成本高等问题,设计了一种新型的自动化程度较高且动作简单的产品自动化生产线码垛搬运机械手。介绍了机械手整体设计、以及控制系统设计,可为企业自动化生产打下良好的基础。 关键词:自动化生产线;机械手;控制系统;设计 引言 随着工业自动化的发展,机械手已成为工业生产中重要的工具,由于其具有稳定性高、操作简单和高效率等特点,因此得到了广泛地应用。然而,目前现有的生产线产品生产普遍存在着自动化程度低、成本高及路径复杂等问题,因此,研究更为简易、且自动化程度较高的码垛搬运机械手是很有必要的。基于此,本文结合现有的多自由度坐标系机器人,设计一种新型的码垛搬运机械手,以适应现代化快速生产的需求和提高企业生产效率。 1.自动化生产线流水线分析 自动化生产线码垛机械手整体流水作业主要由左、右机械手和检测柜组成。机械手主要安装在传输线两侧,左侧作用是将传输线上产品抓取并放入检测柜的每一层中,右侧机械手平台主要是将检测完成的产品取出并放入传输线。其次,产品检测柜平台,主要组成有多层架构、产品检测仪。其作用是将传输线上传送过来的待检产品进行检测。而多层架构可以实现快速摆放并进行检测,提高检测和抓取效率[1]。 2.机械手整体设计 2.1机械手整体结构设计 设计的码垛机械手是一种直角坐标式机械手,主要作用是将待检测的产品从传输线上抓取、升起、移动、下降、松开,然后放入另一条传输线上并进行下一个工位[2]。 直角坐标式机械手主要由支架、Y方向的移动臂、Z方向的升降臂、末端吸盘以及电机组成。 Y方向移动是靠导轨系统完成的,双侧龙门式支架两侧安装有导轨,导轨、齿条与龙门式支架的底座固定,滑块与码垛机械手相固定,而减速器及齿轮固定在机械手Y方向移动臂 上,通过伺服电机转动带动齿轮齿条机构在滑块上运行,从而完成Y方向前进后退动作,伺
搬运码垛机器人毕业设计 Prepared on 22 November 2020
目录1
1绪论 研究背景及意义 随着现代社会科技水平日新月异的变化,机器人技术已经渗透到人类生活中的方方面面,演着不可替代的角色。机器人是多个学科技术综合而成的产物,其应用程度已经逐渐宽广起来研究机器人已经成为了当今时代的趋势。机器人的应用状况已经可以作为权衡一个国家现化程度高低的重要因素。从机器人工作的环境来对机器人进行分类,大体上能划分成两种,就是工业机器人与特种机器人。工业机器人是一种具有良好性能的自动化机械装置,是典型的含有很高科技含量的机电一体化产品。它在提高产品质量、增加经济效益、提高生产率方面起着重要作用。同时工业机器人的发展情况也是日新月异的,所以研发工业机器人是一件刻不容缓的事情。 码垛是随着物流产业的不断壮大而发展起来的一项高新技术,其思想是把物品按照一定规律码放在托盘上,从而能够使物品的存放、搬运、转移等活动变成单元化操作,从而大大提高物流运输的效率。在物料质量不大、尺寸不大、码垛速度要求不高的情况下,码垛工作都是通过人工来实现的。后来为了减轻工人在码垛时的工作强度,产生了托盘操作机、工业机械手等一些比较简单的机械设施。但是随着人们对码垛速度要求的不断提高,传统的人工码垛方式越来越难以达到人们的要求,这种情况下码垛机器人应运而生。 作为工业机器人典型的一种,码垛机器人技术近几年有着非常快速的发展,这样的发展速度和当今世界制造业的小批量、多种类的发展模式是十分吻合的。码垛机器人有着工作能力强、运行速度快、体积比较小、抓取种类多、应用范围广等特点,从而在市场上备受青睐,正因为这些优点,才使得码垛机器人被普遍应用于制造业、码垛、装配、焊接等诸多操作中。 近年来,袋装物品的需求和产量都十分巨大,进而对袋装物品进行运输的需求也在急剧增长。在我国有大量的袋装物品需要进行码垛、卸垛和运输。目前,对袋装物品的火车运输来讲,火车站台卸车、站台码垛、运输装车、运输卸车、库房码垛等工
天津机电职业技术学院毕业综合实践报告 专业电气自动化 班级电气自动化三班
目录 1 机械手的基本介绍 (1) 1.1 机械手的基本结构组成 (1) 1.1.1 气动手爪 (1) 1.1.2 伸缩气缸 (1) 1.1.3 回转气缸及垫板 (2) 1.1.4 提升气缸 (2) 1.2 直线运动传动组件 (2) 1.3 气动控制回路 (3) 2 传感器部分 (5) 2.1 传感器简介 (5) 2.2 磁性开关 (5) 2.3 光电传感器和光纤传感器 (5) 3 伺服电机应用 (7) 3.1 伺服系统 (7) 3.2 交流伺服系统的位置控制模式 (8) 3.3 接线 (10) 3.4 伺服驱动器的参数设置与调整 (10) 3.4.1 参数设置方式操作说明 (11) 3.4.2 面板操作说明: (11) 3.4.3 部分参数说明 (11) 3.5 最大速度(MAX_SPEED)和启动/停止速度(SS_SPEED)12 3.6 移动包络 (13) 4 PLC程序编写 (15) 4.1 PLC的选型和I/O接线 (15) 4.2 伺服电机驱动器参数设置 (15) 4.3 编写和调试PLC控制程序 (16) 4.4 初态检查复位子程序和回原点子程序 (19) 4.5 急停处理子程序 (20) 个人收获 (23) 参考文献 (24) 附录 (25) 致谢 (28)
1 机械手的基本介绍 1.1 机械手的基本结构组成 1.1.1 气动手爪 用于在各个工作站物料台上抓取/放下工件。由一个二位五通双向电控阀控制。见图 1-1 图 1-1 气动手爪 1.1.2 伸缩气缸 用于驱动手臂伸出缩回。由一个二位五通单向电控阀控制。见图 1-2 图 1-2 伸缩气缸
码垛机设计方案(一) 一:系统方案概述经对贵公司产品、场地的分析,技术需求、指标的详细研究和理解,为了充分满足该技术要求,对本工程我们采用方案附图所示的机器人码垛系统。 一:总体方案 本机器人码垛系统,通过品质一流品牌的接近开关、按钮开关、可编程控制器等硬件和专家设计的专门控制软件相结合,实现了从客户自身的包装线出来的站立式包装袋到最后的码垛成型,均为无人的高度自动化系统。完善的安全联锁机制,可以对设备和操作人员提供保护。图形显示的触摸屏使整个系统操作简单,故障诊断容易,同时方便了检修和维护。并且每套系统出厂都经过严格的系统测试,保证客户的运行安全、可靠、稳定。 本机器人码垛系统如附图1所示,由1.倒包线、2.提升线、3.整形线、4.抓取线、5.码垛机器人,五部分构成。其各部分工作过程和其主要功能阐述如下: 1倒包线 2提升线3整形线4抓取线5码垛机器人
从称量秤、缝包机等客户末端出来的袋装产品均为站立式,通过输送机,当包装袋到达倒包线(附图2所示)时,包装袋会接触到其①倒包横梁,自身倒在②倒包板上,然后通过③防滑输送带的传送和④导向滚筒的导向,包装袋会自动调整为长度方向与流水线平行的纵向输送。且此倒包线为高度可以调整型。如果客户在更换产品,导致包装袋长度、称量秤输送线的高度有更改时,此倒包线可以通过其升降按钮,来驱动自身的升降电机,做高度的自动调整。 附图2:倒包线 由于产品从不同高度,客户端输送和倒包线有高度调整,为了更好统一的做码垛规划,最大发挥码垛机器人的功效和码垛能力,现增加提升线(附图3所示)将倒包线出来的包装袋提升到某一统一高度。此提升线为配合前段的自动升降,亦增加有自动升降按钮,可以调节升降电机控制单边提升高度与前段平齐,保证后端高度不变。 ①倒包横梁 ②倒包板 ③防滑输送带 ④导向滚筒
摘要 传统的机械设备与产品,多是以机械为主,是电气、液压或气动控制的机械设备。随着工业水平的不断发展,机械设备己逐步地由手动操作改为自动控制,设备本身也发展成为机电一体化的综合体。可编程序控制器 (PLC是以微处理器为核心, 综合计算机技术、自动化技术和通信技术发展起来的一种新型工业自动控制装置。经过 30多年的发展, 目前, 可编程序控制器已成为工业自动化领域中最重要、应用最多的控制装置, 己跃居工业生产自动化四大支柱 (可编程序控制器、数控机床、机器人、计算机辅助设计与制造的首位。其应用的深度和广度已成为衡量一个国家工业先进与自动化程度高低的标志。 包装码垛自动生产线适用于石油化工、化肥、粮食、港口等行业, 可对 PP 、PE 粒子、 PVC 、化肥、粮食等粉状、颗粒状物料进行全自动包装码垛作业,便于用户储存、运输和销售,全自动包装码垛生产线主要由自动定量包装机、自动上袋机组、封口系统、倒袋机、金属检测机、重量检验机、检选机、喷墨打印机、码垛机等单元组成。通过可编程序控制器、对整个生产线的工作过程进行自动控制,对运行过程中出现的故障或供料不足,供袋不及时、出垛不及时等,进行声光报警。该设备具有操作简单,运行可靠,维修方便等优点。根据用户要求,配上通讯接口和打印机、有打印日、月累计报表的功能。还可与上位计算机或触摸屏连接,对包装码垛自动生产线实现实时监控、远程诊断和网络化管理。 关键词:PLC ;控制系统;包装码垛自动生产 目录 绪论 .............................................................................................................................. 1一、 PLC 的背 景 (2) (一 PLC 的产生 (2) (二 PLC 的应用现状和发展趋势 (2)
多自由度直角坐标型码垛机器人本体结构设计 Body structure design of rectangular coordinate palletizing robot with the multi-degree freedom 学生姓名学号 所在学院班级 所在专业机械设计制造及其自动化 申请学位学士 指导教师职称 副指导教师职称 答辩时间
目录 设计总说明 ............................................................... I INTRODUCTION ............................................................ II 1 绪论 . (1) 1.1 码垛机器人的发展状况 (1) 1.2 研究目的及意义 (1) 2 课题内容及要求 (2) 2.1 研究目标、内容及拟解决的关键问题 (2) 2.2 参数要求 (2) 3 总体机构设计 (3) 3.1 机械抓手设计 (6) 3.1.1 方案选择 (6) 3.1.2 力学分析 (7) 3.1.3 气缸选择 (9) 3.2 丝杆螺母副的计算与选型 (9) 3.2.1 Z轴滚珠丝杠螺母副的计算与选型 (9) 3.2.2 x轴和y轴滚珠丝杠螺母副的计算与选型 (12) 3.3 各轴驱动电机选型 (12) 3.3.1 Z旋转轴电机的选择 (13) 3.3.2 Z轴步进电机的计算与选型 (15) 3.3.3 x轴和y轴步进电机的选用 (17) 3.4 直线滚动导轨副的计算与选型 (18) 3.5 轴承的选用 (20) 3.5.1 Z旋转轴轴承的选用 (20) 3.5.2 Z轴滚珠丝杠下端单向推力球轴承的计算与选型 (20) 3.5.3 其他轴承的选用 (21) 3.6 锥齿轮传动的计算与选型 (23) 4 总体支架的受力分析 (25) 总结 (29) 鸣谢 (30) 参考文献 (31)
摘要 随着微电子技术、传感器技术、控制技术和机械制造工艺水平的飞速发展,机器人的应用领域逐步从汽车拓展到其它领域。在各种类型的机器人中,模拟人体手臂而构成的关节型机器人,具有结构紧凑、所占空间小、运动空间大等优点,是应用最为广泛的机器人之一。尤其由柔性关节组成的柔性仿生机器人在服务机器人及康复机器人领域中的应用和需求越来越突出。 本文将设计一台四自由度的工业机器人,用于给冲压设备运送物料。首先,本文将设计机器人的底座、大臂、小臂和机械手的结构,然后选择合适的传动方式、驱动方式,搭建机器人的结构平台;在此基础上,本文将设计该机器人的控制系统,包括数据采集卡和伺服放大器的选择、反馈方式和反馈元件的选择、端子板电路的设计以及控制软件的设计,重点加强控制软件的可靠性和机器人运行过程的安全性,最终实现的目标包括:关节的伺服控制和制动问题、实时监测机器人的各个关节的运动情况、机器人的示教编程和在线修改程序、设置参考点和回参考点。 关键词:机器人,示教编程,伺服,制动
ABSTRACT With the development of microelectronic technology, sensor technology, the rapid development of control technology and machinery manufacturing technology level, the application of robots gradually expanded from cars to other fields. In all types of robots, the articulated robot arm simulation human form, has the advantages of compact structure, small occupied space, large moving space, is one of the most widely used robots. Especially flexible biomimetic robot composed of flexible joint in the field of service robot and rehabilitation robot application and demand more and more prominent. In this paper I will design an industrial robot with four DOFs, which is used to carry material for a punch. First I will design the structure of the base, the big arm, the small arm and the end manipulator of the robot, then choose proper drive method and transmission method, building the mechanical structure of the robot. On this foundation, I will design the control system of the robot, including choosing DAQ card, servo control, feedback method and designing electric circuit of the terminal card and control software. Great attention will be paid on the reliability of the control software and the robot safety during running. The aims to realize finally include: servocontrol and brake of the joint, monitoring the movement of each joint in realtime, playback programming and modifying the program online, setting reference point and returning to reference point. KEY WORDS: robot, playback, servocontrol, brake
摘要 传统的机械设备与产品,多是以机械为主,是电气、液压或气动控制的机械设备。随着工业水平的不断发展,机械设备己逐步地由手动操作改为自动控制,设备本身也发展成为机电一体化的综合体。可编程序控制器(PLC)是以微处理器为核心,综合计算机技术、自动化技术和通信技术发展起来的一种新型工业自动控制装置。经过30多年的发展,目前,可编程序控制器已成为工业自动化领域中最重要、应用最多的控制装置,己跃居工业生产自动化四大支柱(可编程序控制器、数控机床、机器人、计算机辅助设计与制造)的首位。其应用的深度和广度已成为衡量一个国家工业先进与自动化程度高低的标志。 包装码垛自动生产线适用于石油化工、化肥、粮食、港口等行业,可对PP、PE粒子、PVC、化肥、粮食等粉状、颗粒状物料进行全自动包装码垛作业,便于用户储存、运输和销售,全自动包装码垛生产线主要由自动定量包装机、自动上袋机组、封口系统、倒袋机、金属检测机、重量检验机、检选机、喷墨打印机、码垛机等单元组成。通过可编程序控制器、对整个生产线的工作过程进行自动控制,对运行过程中出现的故障或供料不足,供袋不及时、出垛不及时等,进行声光报警。该设备具有操作简单,运行可靠,维修方便等优点。根据用户要求,配上通讯接口和打印机、有打印日、月累计报表的功能。还可与上位计算机或触摸屏连接,对包装码垛自动生产线实现实时监控、远程诊断和网络化管理。 关键词:PLC;控制系统;包装码垛自动生产
目录 绪论 (1) 一、PLC的背景 (2) (一)PLC的产生 (2) (二)PLC的应用现状和发展趋势 (2) (三)包装码垛自动生产线的发展 (3) 二、包装码垛自动生产线机械系统设计 (4) (一)包装码珠自动生产线系统组成 (4) 三、气动及真空系统 (14) (一)气动系统的结构 (14) (二)真空系统 (17) 四、PLC控制系统设计 (18) (一)包装码垛自动生产线工艺流程 (18) (二)程序控制逻辑 (19) (三)PLC控制系统硬件设计 (27) (四)PLC控制系统软件程序设计 (32) 结论 (34) 参考文献 (35) 致谢 (36) 附页 (37)
文献综述 题目工业机械手及PLC 学生姓名丁金涛 专业班级机械工程及自动化4班 学号20080460205 院(系)机械工程学院 指导教师张瑞 完成时间 2012年 03月 01日
工业机械手及PLC控制 一.工业机械手概述 用于再现人手功能的技术装置称为机械手。机械手是模仿人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。在工业生产中应用的机械手被称为工业机械手。 工业机械手是近代自动控制领域中出现的一项新技术,并已成为现代机械制造生产系统中的一个重要组成部分,这种新技术发展很快,逐渐成为一门新兴的学科——机械手工程。机械手涉及到力学、机械学、电器液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。 工业机械手是近几十年发展起来的一种高科技自动生产设备。工业机械手也是工业机器人的一个重要分支。他的特点是可以通过编程来完成各种预期的作业,在构造和性能上兼有人和机器各自的优点,尤其体现在人的智能和适应性。机械手作业的准确性和环境中完成作业的能力,在国民经济领域有着广泛的发展空间。 机械手的发展是由于它的积极作用正日益为人们所认识:其一、它能部分的代替人工操作;其二、它能按照生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送和装卸;其三、它能操作必要的工具进行焊接和装配,从而大大的改善了工人的劳动条件,显著的提高了劳动生产率,加快实现工业生产机械化和自动化的步伐。因而,受到很多国家的重视,投入大量的人力物力来研究和应用。尤其是在高温、高压、粉尘、噪音以及带有放射性和污染的场合,应用的更为广泛。在我国近几年也有较快的发展,并且取得一定的效果,受到机械工业的重视。 机械手是一种能自动控制并可从新编程以变动的多功能机器,他有多个自由度,可以搬运物体以完成在不同环境中的工作。机械手的结构形式开始比较简单,专用性较强。随着工业技术的发展,制成了能够独立的按程序控制实现重复操作,适用范围比较广的“程序控制通用机械手”,简称通用机械手。由于通用机械手能很快的改变工作程序,适应性较强,所以它在不断变换生产品种的中小批量生产中获得广泛的引用。 二.工业机械手的发展史 现代工业机械手起源于20世纪50年代初,是基于示教再现和主从控制方式、能适应产品种
工业机械手设计 一、毕业设计题目概述 机械手是模仿人的手部动作,按照给定程序、轨迹和要求实现自动抓取、搬运和操作的自动装置,它是机械化、自动化的重要手段。因此,获得了日益广泛的应用,特别在高温、高压、危险、易燃、易爆、放射性等恶劣环境,以及笨重、单调、频繁的操作中,它代替了人的工作,具有重要的意义。在机械加工中,冲压、铸、锻、焊、热处理、电镀、喷漆、装配以及轻工业、交通运输、国防工业等各方面,也已愈来愈引起人们的重视。 机械手一般由执行机构、驱动机构、控制机构以及位置检测装置等组成,驱动系统可采用液压传动、气动传动、电气传动和机械传动等形式,而多数采用电液机联合传动。 该机械手是将圆柱形零件从传送带上夹装到专用机床上,待加工完毕后再夹装回传送带的专用机械手(图1)。机械手总体设计分为夹持器、伸缩臂、升降臂和底座四大部件设计及二个系统:PC电控系统与液压控制系统设计。夹持器安装于伸缩臂上,伸缩臂安装在升降臂上,升降臂安装在底座上。连接方式均为法兰盘螺栓连接。 机械手工作过程如图2所示。 图2 机械手工作流程图 码垛机械手结构如图3所示。工作程序为:液压缸2伸出→四边形机构3下降→夹持器4夹紧工件5→液压缸2缩回→四边形机构3上升→底座1回转→(到达位置后)液压缸2伸出→四边形机构3下降→夹持器4放开工件5→液压缸2缩回→四边形机构3上升→底座1回转至原位。然后进行下一循环。 改变夹持器形状,可夹持不同工件或物体。 二、设计参数 (说明:工业机械手改换末端执行器和工作方式,可完成不同工件或物体的操作,基本结构、设计内容和控制程序大体相同。本设计题目共分四种:工件工序转换机械手;箱体类物体移位机械手;工件翻转机械手;装箱机械手。) 本设计工业机械手由四个部分组成:底座回转部分、机身升降部分、伸缩臂伸缩部分和末端执行器夹持部分。 主机总体参数:圆柱形零件的尺寸为直径80毫米,高为150毫米,机械手回转角度为90度,升降高度为500mm,伸缩长度为300mm。 三、设计方案及要求 (一)底座回转部分设计方案及要求 1、转动角度90度,单向运动时间2秒;定位准确,要有定位措施。 2、采用回转支承机构,齿圈固定,液压马达行星齿轮传动或电机驱动。 3、与大臂和地基采用法兰联接。 (二)机身升降部分设计方案和要求 1、升降臂起升高度:0—500mm,任意可调; 2、单向升降运动时间:0—3s; 3、可采用电机驱滚珠丝杠传动或液压传动齿轮倍程升降机构,共两种方案。 4、升降臂定位可靠、精确。 5、升降臂与旋转底座、伸缩臂为法兰连接; 6、结构设计时考虑伸缩臂工作时的整机平衡; (三)伸缩臂设计方案和要求 1、伸缩长度:300mm,伸缩臂固定在升降台上,随升降台做上下运动和旋转运动;伸缩臂
液压机械手设计毕业设计 毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
一、引言 1.1机械 液压通用机械手,就其本质上来说,属于工业机器人的范畴,机器人学是近几十年来迅速发展起来的一门综合学科。它集中了机械工程、电子工程、计算机科学、自动控制以及人工智能等多种学科的最新研究成果,体现了光机电一体化技术的最新成就,是当代科学技术发展最活跃的领域之一,也是我国科技界跟踪国际高技术发展的重要课题。 “机械手”(Machanical Hand):多数指附属于主机、程序固定的自动抓取、操作装臵(国内一般称作机械手或专用机械手)。如自动线、自动机的上下料,加工中心的自动换到的自动化装臵。 1.2机械手特点、结构与研究意义 1.2.1机器人的特点 机器人的主要特点体现在它的通用性和适应性等方面。 1.通用性 机器人的通用性指具有执行不同功能和完成多样简单任务的实际能力;通用性也意味着,机器人是可变的几何结构。或者说在机械结构上允许机器人执行不同的任务或以不同的方式完成同一工作。 2.适应性 机器人的适应性是指具有对环境的自适应能力,及机器人能够自主执行实现经规划的中间任务,而不管执行过程中所发生的没有预计到的环境变化。 1.2.2机器人的系统结构 一个机器人系统一般由四个相互作用的部分组成,即机械手、环境、任务和控制器。 工业机器人的本体机械系统即为通常的机械手装臵,他由肩、臂、腕、机身或行走机构组成,组合为一个相互依赖的运动机构。 环境即指机器人所处的周围状态,环境不仅由机和条件决定,而且有环境和它所包含的每个事物的全部自然特性决定。 机器人体系结构中的任务一般定义为环境的两种状态(初始状态和目标状态)间的差别,必须用适当的程序语言来描述,并能为计算机所理解。 机器人控制器一般为控制计算机,接收来自传感器的信号,对其进行数据处理,并按照预存信息,即机器人的状态及环境情况等,生成控制信号来驱动机器人的各个关节运动。
1.设备材质 所有与物料接触部分均为SS304不锈钢材料,电子定量秤、过渡料斗为不锈钢;摆臂装袋机、立袋输送机、夹口整形机、折边缝口机的运动部件(轴和链轮等传动件按工况条件选择合适的金属材料)为不锈钢,其余碳钢喷塑,包装单元机架为碳钢,紧固件为不锈钢材质。加料斗需安装气动振动器,选用不锈钢材质。减速电机及气缸均采用防腐型。 2.插板阀 与产品接触部位为SS304不锈钢材质,安装在料仓下部,用于截止下料通道中的物料。 3.软连接 电子定量秤与输料管线连接方式采用软连接,主要目的是将物料输送过程中产生的振动与电子定量秤隔开,确保电子定量秤的称重精度。 材质:防静电纤维滤布 4.电子定量秤 ?称重重量:50kg/bag ?称重误差:±0.2%(2σ) ?结构型式:气缸双秤 电子定量秤结构要求: 给料机构要求采用并联气缸驱动落料闸门,以实现粗、精变速给料,粗给料控制称重速度,精给料控制称重精度,确保给料控制平稳、迅速、精度高。 称重箱采用框架式结构,要求稳定、密封性好。两只称重压力传感器固定在称重箱的框架上,应具有独立的罩体,防尘、防碰。 称重料斗通过关节轴承与称重压力传感器相连。称重料斗由两根钢丝拉在称重箱的框架上。确保这种结构有效限制称重料斗水平方向的振动,使称重料斗处于非常稳定的状态,不会在垂直方向上产生任何分力,在机械上保证电子称重机构的称重精度。
称重料斗底部开门为45°斜放料门,由立式气缸控制,要求放料速度快,并且料门与料斗间应设有密封胶条,保证料门在关闭时密封性好。 称重箱体外支撑采用框架结构,预留除尘接口。 称重箱体内部所有螺栓、螺母均采用钢丝和开口销的防松措施,以防脱落。布线采用封闭的不锈钢管,要求整齐美观。 5.过渡料斗 过渡料斗用于过渡联接电子定量秤和装袋机,材质SS304。 6 .装袋机组 装袋机组由供袋盘、分拣机构、空袋输送机构、开袋套袋机构、夹袋器、摆臂移送机构和机架等组成。 7.供袋盘 作用是为装袋机提供空包装袋,采用三工位供袋盘,链条传动推板将空包装袋循环推至分拣位,每盘可存储30-50个空袋,配有真空检测供袋系统。 电机功率: 0.37kW 8.分拣机构 分拣机构采用气缸驱动吸盘抓取空包装袋,链排输送方式。链排为两特殊链条,使用连杆连接两链条,在单层输送链上设置两组连杆,交替输送空包装袋,提高了输送速度和效率。在输送链排上方设置有空袋侧整形机构,在分拣的同时,将包装袋对中。 9.空包装袋输送机构 此机构为皮带式输送机,入口接受分拣机构送来的空包装袋,由升降压轮作用,将包装袋送机开袋机构。 10 .开袋套袋机构 由开袋吸盘由气缸驱动,套袋手抓有伺服电机驱动,摆动式机构。开袋吸盘
第一章系统结构 系统由三台伺服电机完成,其中一台作为旋转轴,用NSK直驱电机驱动;两外两台作为水平轴和垂直轴,用台达伺服电机驱动。 现分别采用三个接近开关作为三个轴原点回归的JOG近点信号。 第二章控制方式 1、伺服驱动器设置: 台达驱动器设置为PT控制模式,即外部脉冲+方向控制,并将DI1 与DI2功能设为伺服启动与异常重置;NSK将PC参数设为1(外部 脉冲/方向)。 2、台达驱动器包括2个输入点,另外包括输入脉冲/方向的CN1端 子3个;NSK驱动器包括6个输入点 台达驱动器输入点NSK驱动器输入点 DI1 伺服启动CN端子7伺服启动 DI2 异常重置CN端子4解除警报 CN端子22输入/方向信号+(CW+)CN1端子35 Sign 端指令脉波的 外加电源 CN1端子37 位置指令符号(-) CN端子23输入/方向信号—(CW—)CN1端子41 位置指令脉波(-) CN端子24输入/脉冲信号+(CCW+) CN端子25输入/脉冲信号—(CCW—)3参数设定 NSK中需要整定的伺服参数包括: 名称注释当前设定值
LO 负载惯量0.019 VG 速度比例增益 2.2 PG 位置比例增益0.002 SG 伺服增益0 FP 第一低通滤波频率200 FS 第二低通滤波频率200 注:详细参数参照参数一览表。 注:参数整定流程见操作手册第5章 注:LO的设定一般采用自动整定AT—OK完成,详见简明操作手册。 第三章PLC I/O点分配 1、输入: X11 Z轴JOG信号 X12 Y轴JOG信号 X16 X轴JOG信号 2、输出: Y0 Z轴高速脉冲Y10Y轴伺服启动 Y1 Z轴方向Y11Y轴异常重置 Y4 Y轴高速脉冲Y14X轴伺服启动 Y5 Y轴方向Y15X轴异常重置 Y6 X轴高速脉冲Y20Z轴伺服启动 Y7 X轴方向Y21Z轴异常重置
理工学院毕业设计(论文)开题报告 题目:铣床自动上下料点位控制机械手的设计 学生姓名:韩抟彬学号: 10L0551370 专业:机械设计制造及其自动化 指导教师:陈继荣 2014年3月31日
毕业设计开题报告 摘要; 在当今大规模制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,工业机器人作为自动化生产线上的重要成员,逐渐被企业所认同并采用。工业机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,目前,工业机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作,工作方式一般采取示教再现的方式。 PLC是以现代微处理器技术为核心的控制器,作为一种通用的工业控制器,其可靠性高、抗干扰能力强;PLC由于采用现代大规模集成电路技术,采用严格的生产工艺制造,内部电路采取了先进的抗干扰技术,具有很高的可靠性,此外,PLC带有硬件故障自我检测功能,出现故障时可及时发出警报信息;PLC采用光电隔离和滤波技术有效抑制外部干扰源对PLC的影响,此外PLC还可在强、通用性好;开发周期短,功耗小。本课题对现代工业的的发展具有很重要的意义。 1.课题研究的目的和意义 1.1本课题的意义 机械手又名工业机器人,是近代自动控制领域中出现的一项新技术,并已成为现代科技的一个重要组成部分。在机械行业中,机械手越来越广泛的得到应用,它可用于零部件的组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更为普遍。目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。 机械手的积极作用正日益为人们所认识,其一,它能部分地代替人的劳动并能达到生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送。因此,它能大大地改善工人的劳动条件,加快实现工业生产机械化和自动化的步伐。因此,受到各先进单位的重视并投入了大量的人力物力加以研究和应用。尤其在高温、高压、粉尘、噪声的场合,应用得更为广泛。在我国,近代几年来也有较快的发展,并取得一定的
码垛机械手数控系统简单应用 温玉堃 (1.唐山首信自动化技术有限责任公司河北唐山 063000) 摘要:针对码垛人力资源紧张,引入自动码垛机械手,此系统全国产化,由一台WINCE6.0的显示屏一体机为主机,JAVA为程序语言编写,以EtherMAC为基础通讯协议,通讯稳定,系统良好,在电机选取上为安川电机和电机伺服驱动器控制运行,多次测试下反映良好,小模块E-LINK通讯器稳定,经多次硬件和软件调试改造,其工作方式、软硬件控制方式,通过样机试验,验证后控制性能、工作效率、稳定性符合工艺要求。 关键词:码垛机械手;驱动器;伺服电机;性能试验 0引言 硫铵自动包装线由国产码垛机,该码垛机属四度坐标机械手,柱面坐标机械手的空间位置机构由旋转基座(B轴)、垂直移动(V轴)和水平移动(H轴)以及前端抓取旋转轴(P轴)构成,动作空间成圆柱形。由4个电机控制四个自由度,在使用过程中运行平稳,满足包装机出料速度。 1硬件系统 1.1 机械手硬件 如图1所示,机械手机械示意图,H轴(水平导轨)、V轴(竖直导轨)、B轴(底座旋转,水平导轨)、P轴(手抓旋转前端法兰盘),通过四轴联动,完成工作空间内的抓放操作。 驱动器和电机为安川提供,其主要特点:1、 转矩控制、位置控制和速度控制三位一体, 控制方位切换采用参数设定切换。2. 主控 回路分离布线,在控制器上直接设定,减 少了配线,这些都使配线、更换更加简单 方便。3高速高精度,采用高分辨率的编 码器(16位、17位),提高了位置控制精 度。采用d-p轴变换电流控制法,将转矩 控制精度从±5%提高到±2%。 图1 机械手机械示意图
机械手夹爪安装在机械臂的前端法兰 盘,它由2个气缸控制抓取和放卸, 光电开关用于检测入料到位,码垛舵盘 位置到位,其信号传入以太网I/O模块中。 1.2 通讯电机控制系统 一体机作为工控主机,以太网硬件实现实时 控制的EtherMAC (Ethernet for Manufacture Automation Control)方案具 有开放性好、硬件标准化,可靠性高,成本 低廉。采用通用网卡,适合于I/O类接口(几 毫秒到十几毫秒响应周期),应用于运动控制,在采用标准Windows CE6平台下,可实现1ms的插补周期,还引进德国3S公司的Codesys编程平台,采用IEC61131-3软PLC、软运动控制编程语言,方便系统集成商、现场工程师结合特有的工艺需求开发有个性化的特色产品。 系统选用1个15寸工控机,4个太网单轴接口小模块e-link,两个IO接口板, 其中e-Link接口板使用50针接口与伺服驱动器相连,实现对驱动器的控制。四个 e-Link接口板按照水平运动、竖直运动、底座旋转、手爪旋转的顺序分别连接到伺 服电机驱动器的CN1端口,通过CN1端口的信号实现对伺服电机位置模式的控制。 e-Link接口板的基本功能是接收计算机发出的控制指令并将指令转化为对电机的 控制信号发送给伺服电机驱动器,同时接收伺服电机驱动器返回的伺服电机上面的
搬运码垛机器人毕业设 计 Company number:【WTUT-WT88Y-W8BBGB-BWYTT-19998】
目录1
1绪论 研究背景及意义 随着现代社会科技水平日新月异的变化,机器人技术已经渗透到人类生活中的方方面面,演着不可替代的角色。机器人是多个学科技术综合而成的产物,其应用程度已经逐渐宽广起来研究机器人已经成为了当今时代的趋势。机器人的应用状况已经可以作为权衡一个国家现化程度高低的重要因素。从机器人工作的环境来对机器人进行分类,大体上能划分成两种,就是工业机器人与特种机器人。工业机器人是一种具有良好性能的自动化机械装置,是典型的含有很高科技含量的机电一体化产品。它在提高产品质量、增加经济效益、提高生产率方面起着重要作用。同时工业机器人的发展情况也是日新月异的,所以研发工业机器人是一件刻不容缓的事情。 码垛是随着物流产业的不断壮大而发展起来的一项高新技术,其思想是把物品按照一定规律码放在托盘上,从而能够使物品的存放、搬运、转移等活动变成单元化操作,从而大大提高物流运输的效率。在物料质量不大、尺寸不大、码垛速度要求不高的情况下,码垛工作都是通过人工来实现的。后来为了减轻工人在码垛时的工作强度,产生了托盘操作机、工业机械手等一些比较简单的机械设施。但是随着人们对码垛速度要求的不断提高,传统的人工码垛方式越来越难以达到人们的要求,这种情况下码垛机器人应运而生。 作为工业机器人典型的一种,码垛机器人技术近几年有着非常快速的发展,这样的发展速度和当今世界制造业的小批量、多种类的发展模式是十分吻合的。码垛机器人有着工作能力强、运行速度快、体积比较小、抓取种类多、应用范围广等特点,从而在市场上备受青睐,正因为这些优点,才使得码垛机器人被普遍应用于制造业、码垛、装配、焊接等诸多操作中。 近年来,袋装物品的需求和产量都十分巨大,进而对袋装物品进行运输的需求也在急剧增长。在我国有大量的袋装物品需要进行码垛、卸垛和运输。目前,对袋装物品的火车运输来讲,火车站台卸车、站台码垛、运输装车、运输卸车、库房码垛等工