//同时利用两个定时器控制蜂鸣器发声,定时器0控制频率,定时器1控制同一个频率持续的时间,间隔300ms依次输出 1、"1 0、" // 50、" 100、" 200、" 400、"800HZ的方波 #include
TL0=(65536-fre)%256; TH1=(65536-500)/256; TL1=(65536-500)%256; EA=1;//开总中断 ET0=1;//开定时器0中断 ET1=1; TR1=1; TR0=1;//启动定时器0 while (1) //等待中断产生{if(tt=a){tt=0; Waveout=~Waveout;}}}void timer0() interrupt 1//定时器0中断{TR0=0;//进中断后先把定时器0中断关闭,防止内部程序过多而造成中断丢失TH0=(65536-fre)/256; TL0=(65536-fre)%256; tt++;}void timer1() interrupt 3//定时器1中断用来产生300微秒时间定时{TH1=(65536-500)/256; TL1=(65536-500)%256; flag++; if(flag==6){flag=0; freq=Freq[i];}}
中间继电器实验作业指导书 一、实验目的 中间继电器种类很多,目前国内生产的就有二十多个系列,数百种产品。本实验选择了具有代表性的三个系列中的四种中间继电器进行实验测试,希望能通过本次实验熟悉中间继电器的实际结构、工作原理、基本特性,掌握对各类中间继电器的测试和调整方法。 二、预习与思考 1、为什么目前在一些保护屏上广泛采用DZ-30B系列中间继电器,它与DZ-10系列中间继电器比较有那些特点? 2、具有保持绕组的中间继电器为什么要进行极性检验?如何判明各绕组的同极性端子。 3、使用中间继电器一般根据哪几个指标进行选择? 4、发电厂、变电所的继电保护及自动装置中常用哪几种中间继电器? 三、原理说明 DZ-30B、DZB-10B、DZS-10B系列中间继电器用于直流操作的各种继电保护和自动控制线路中,作为辅助继电器以增加接点数量和接点容量。
1、DZ-30B 为电磁式瞬时动作继电器。当电压加在线圈 两端时,衔铁向闭合位置运动,此时常开触点闭合,常闭触点断开。断开电源时,衔铁在接触片的反弹力下,返回到原始状态,常开触点断开,常闭触点闭合。继电器内部接线见图4-1 图4-1 DZ-30B 中间继电器内部接线图 2、DZB-10B 系列是具有保持绕组的中间继电器,它基于电磁原理工作,按不同要求在同一铁芯上绕有两个以上的线圈,其中DZB-11B 、12B 、13B 为电压启动、电流保持型;DZB-14B 为电流启动、电压保持型。该继电器为瞬时动作继电器。当动作电压(或电流)加在线圈两端时,衔铁向闭合位置运动,此时,常开触点闭合,常闭触点断开,断开启动电源时,由于电压(或电流)保持绕组的磁场的存在所以衔 V 123456 1817 1615141310DZ-31B 三 常开触点三转换触点 12 119 87V 12 456 18 17 1615141310DZ-32B 六常开触点 12 119 87
实验十二继电器控制 一、实验目的 掌握用继电器控制的基本方法和编程。 二、实验内容 1、利用8255 的PA0 输出高/ 低电平,控制继电器的开合,以实现对 外部装置的控制。 2、实验预备知识:现代自动化控制设备中都存在一个电子与电气电 路的互相联结问题。一方面要使电子电路的控制信号能够控制电气电 路的执行元件(电动机、电磁铁、电灯等), 一方面又要为电子电路 的电气提供良好的电隔离, 以保护电子电路和人身的安全。电子继电 器便能完成这一桥 梁作用。 三、实验接线图 四、实验步骤 (1)脱机实验 ①在系统处于命令 提示符“P.”下, 按SCAL键。 ②在系统处于命令提示符“P.”下,输入1810,按EXEC键。 ③继电器应循环吸合。 (2)联机实验 ①断电连接导线, 连8255 的PA0 到JIN 插孔;继电器常开触点JK 接L2, 常闭触点JB接Ll ,中心抽头JZ 接地。 ②打开JDQ.ASM ③编译下载 ④全速运行,运行程序。 五、实验程序清单 CODE SEGMENT ;JDQ.ASM ASSUME CS:CODE IOCONPT EQU 0FF2BH IOBPT EQU 0FF29H IOAPT EQU 0FF28H ORG 1810H START: MOV AL,88H MOV DX,IOCONPT OUT DX,AL ;写命令字 NOP
NOP NOP IOLED1: MOV DX,IOAPT ;PA口 IODE2: MOV AL,01H OUT DX,AL ;PA0 置1 CALL DELAY ; 延时 MOV AL,00H OUT DX,AL ;PA0 置0 CALL DELAY ;延时 JMP IODE2 ;循环 DELAY: MOV CX,0FFFFH DELY: LOOP DELY RET CODE ENDS END START 六实验结果 拨动开关,两个灯依次点亮。 本次实验练习并掌握用继电器控制的基本方法和编程。通过利用 8255 的PA口输出高/ 低电平,控制继电器的开合,可以实现对外部 装置的控制。
实验二蜂鸣器控制实验 实验目的:1 了解ARM处理器PWM接口的处理机制 2 掌握在S3C2440A平台下进行PWM接口应用编程实验器材:Sinosys-EA2440实验箱PC机 实验原理:脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法。通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。即通过改变方波的占空比表示不同的模拟信号的电平。 在ARM嵌入式实验中,其实是通过微处理器中的计数器,对经过频率变换的输出频率周期进行计数,在PWM中,是通过两个寄存器(TCNTBn和TCMPBn)对输出信号的占空比进行调制,TCNTBn可以设置为TCMPBn+X,当TCNTBn在TCMPBn和TCMPBn+X 之间计数时,TOUTn(即输出信号)输出低电平,当TCNTBn计数下降到TCMPBn时,TOUTn电平反转,变为高电平,直到TCNTBn计数减到0,如果此时开启了重载,则又把预定的值重新装入TCNTBn和TCMPBn中,重复以上过程。 在ARM嵌入式PWM中,会提供一个基准时钟作为输入时钟,PWM调制会对输入的时钟进行分频等操作进入计时器逻辑,其电路图2.1如下:
图2.1 PWM计时器框图 如图2.1,输入的时钟PCLK经过一个8bit预置器和一个分频器,将得到的时钟进入计数器逻辑板块作为驱动时钟,而输出的TOUT则作为蜂鸣器(蜂鸣器控制电路如图2.2)的驱动信号。 图2.2 蜂鸣器控制电路
实验总结:实验的主函数首先设置时钟,端口初始化,并捕捉进入测试函数的指令,与实验一大致相同,在此不在赘述,重点分析测试函数。测试函数如下: void Beep(int freq,int ms) { int div,i rGPBCON&=~0x3; //将GPB0作为输入口rGPBCON|=0X2; // 接入TIMER0 rTCFG0&=~0XFF; // 设置prescaler为32 rTCFG0|=0XF; rTCFG1&=~0XF; //选择mux=1/16 rTCFG1|=0X3; div=plck/32/16/freq 计算TCNTB0的值rTCNTB0=div; rTCMPB0=rTCNTB0>>2; 占空比为4:1 rTCON&=~0X1F; 设置死区自动重载反转人工载入开始rTCON|=0XB; 关闭死区开启重载关反转开人工载入开始rTCON&=~2; 关闭人工载入 for(i=1,i #include } } void Play_Song(uint8 i)//蜂鸣器发声函数 { uint8 Temp1,Temp2; uint8 Addr; Count = 0; //中断计数器清0 Addr = i *3; while(1) { Temp1 = SONG[Addr++]; if (Temp1 == 0xFF) //休止符 { TR0 = 0; Delay_xMs(100); } else if (Temp1 == 0x00) //歌曲结束符 { return; } else { Temp2 = SONG[Addr++]; TR0 = 1; while(1) { Speak = ~Speak; Delay_xMs(Temp1); if(Temp2 == Count) { Count = 0; break; } } } } } void keyscan (void)//按键切换声音函数 { if(key1==0) { delay(10); 实验二、电磁型时间继电器、信号继电器、中间继电器实验 一、实验目的 1、熟悉时间继电器的实际结构、工作原理、基本特性、掌握时限的整定和试验调试方法 2、熟悉和掌握信号继电器的工作原理、实际结构、基本特性及其工作参数和释放参数的测定。 3、熟悉和掌握中间的工作原理、实际结构、基本特性及其中间几点起的测试和调整方法。 二、预习与思考 1、影响时间继电器起动电压、返回电压的因素是什么 2、DXM—2A型信号继电器具有那些特点 3、信号继电器实验时为什么要注意工作线圈的极性和释放线圈的极性如接反了会出现什么情况 4、根据你所学的知识说明时间继电器常用在哪些继电保护装置电路 5、发电厂、变电所的继电器保护及自动装置中常用哪几种中间继电器 三、原理说明 1、时间继电器 DS—20系列时间继电器用于各种继电保护和自动控制线路中,使被控制 元件按时限控制原则进行动作。 DS—20系列时间继电器是带有延时机构的吸入式电磁继电器,其中DS—21~DS—24 是内附热稳定限流电阻型时间继电器(线圈适于短时工作),DS—21/c~DS—24/c是外附热稳定限流电阻型时间继电器(线圈适于长时工作)。DS—25~28是交流时间继电器。 该继电器具有一付瞬时转换触点,一付滑动主触点和一付终止主触点。继电器内 部接线见图2-1。 图2-1 时间继电器内部接线图 当加电压于线圈两端时,衔铁克服塔形弹簧的反作用力被吸入,瞬时常开触点闭合, 常闭触点断开,同时延时机构开始启动,先闭合滑动常开主触点,再延时后闭合终止常开主触点,从而得到所需延时,当线圈断电时,在塔形弹簧作用下,使衔铁和延时机构立刻返回原位。 从电压加于线圈的瞬间起到延时闭合常开主触点止,这段时间就是继电器的延时时间,可通过整定螺钉来移动静接点位置进行调整,并由螺钉下的指针在刻度盘上指示要设定的时限。 2、信号继电器 DXM —2A 型信号继电器适用于直流操作的继电保护线路和自动控制线路中作远距离复归的动作指示。 继电器由密封干簧接点,工作绕组,释放绕组,自锁磁铁和指示灯等组 成。横截面结构示意图见图2-2。 1218 1716151413DS-21~22时间继电器正面内部接线图 DS-21/C~22/C时间继电器正面内部接线图 1256 18 1716151413V 56 V R 3434 任务五,编写产品检验卡片 一,产品检验要求 1、测触点电阻 用万能表的电阻档,测量常闭触点与动点电阻,其阻值应为0;而常开触点与动点的阻值就为无穷大。由此可以区别出那个是常闭触点,那个是常开触点。 2、测线圈电阻 可用万能表R×10Ω档测量继电器线圈的阻值,从而判断该线圈是否存在着开路现象。 3、测量吸合电压和吸合电流 找来可调稳压电源和电流表,给继电器输入一组电压,且在供电回路中串入电流表进行监测。慢慢调高电源电压,听到继电器吸合声时,记下该吸合电压和吸合电流。为求准确,可以试多几次而求平均值。 4、测量释放电压和释放电流 也是像上述那样连接测试,当继电器发生吸合后,再逐渐降低供电电压,当听到继电器再次发生释放声音时,记下此时的电压和电流,亦可尝试多几次而取得平均的释放电压和释放电流。一般情况下,继电器的释放电压约在吸合电压的10~50%,如果释放电压太小(小于1/10的吸合电压),则不能正常使用了,这样会对电路的稳定性造成威胁。 主要测试参数及定义表 件下进行。如有特殊要求,可由供需双方协议。 对于电源没有其他的的规定,电源电压的变化率不得大于10%,直流电源电压波纹系数应不大于5%。电源极性不得相反。做好正确的,合理的,科学的检验。 是指这些特性在产品使用中的重要程度。包括 a)安全、环保要求 b)性能、结构的使用要求, c)可靠性、使用寿命及互换性要求, d)材料性能及处理规定 e)焊接及铸、锻规定; f)尺寸、公差与配合、形状和位置公差及表面粗糙度等要求; g)外形、外观要求: b)清洁度要求: i)涂敷、包装、防护及储运等要求 产品装配真实项目说明书 一JS7-A时间继电器的机构 电磁系统、工作触头、气室、传动机构组成。 电磁机构组件:线圈铁心衔铁推板返力弹簧瞬时触头(微动开关)。 空气室组件:橡皮膜活塞杠杆宝塔弹簧延时触头调节螺钉 实验一电磁型继电器的特性实验 一.实验目的: 1.进一步了解电磁型继电器(电流、电压、时间、中间继电器)的构造、工作原理和特性; 2.了解继电器各种参数的意义,掌握继电器整定植的调试方法; 3.了解有关仪器、仪表的选择原则及使用方法。 二.实验项目: 1.打开外壳,仔细观察各种继电器的内部构造,并记录下继电器铭牌的主要参数; 2.测定电流继电器的动作电流、返回电流及返回系数; 3.测定电压继电器的动作电压、返回电压及返回系数; 4.测定时间继电器的动作电压、返回电压及返回系数; 5.测定中间继电器的动作电压、返回电压及返回系数。 三.实验内容: (一)熟悉常用继电器的内部接线 DL-21C DL-22C;DY-22C DL-23C;DY-23C DS-21A~24A DZ-31B (二)测定电流继电器的动作电流I.d.j。返回电流I f.j及返回系数K f 。 1.实验接线: 图1-1 电流继电器实验接线图 2.实验需用仪器设备 ①交流电流表 0~5A ②单相自藕调压器(ZOB) 2KVA 220/0~250V 一台 ③滑线电阻 69Ω3.9A或40Ω6A 一台 ④电流继电器 DL-21C 一个 3.实验方法 (1)首先将继电器的两组线圈串联; 将继电器的整定把手放在某一选定位置; 将自藕调压器把手旋至输出为零伏位置; 将滑线电阻的滑动端放在阻值为最大位置; (2)合上电源开关,逐渐增大通入继电器的电流,使继电器刚好动作(常开接点闭合, 即指示灯亮)的最小电流称为电流继电器的动作电流I d.j. (3)逐渐减小通入继电器的电流,使继电器的接点返回到原始位置(常开接点断开, 即指示灯灭)的最大电流称为电流的继电器的返回电流If.j. (4)测定I d.j 和I f.j 时,对所选的整定位置重复作三次,将测量结果填入表1中 (5)断开电源,将继电器的两组线圈改为并联.然后,按上述方法测量继电器线圈并联时的和将测量结果填入表2中. (6)数据处理 误差: △I%= 要求: 返回系数:K= 要求:0.05 任务五,编写产品检验卡片一,产品检验要求 1、测触点电阻 用万能表的电阻档,测量常闭触点与动点电阻,其阻值应为0;而常开触点与动点的阻值就为无穷大。由此可以区别出那个是常闭触点,那个是常开触点。 2、测线圈电阻 可用万能表R×10Ω档测量继电器线圈的阻值,从而判断该线圈是否存在着开路现象。 3、测量吸合电压和吸合电流 找来可调稳压电源和电流表,给继电器输入一组电压,且在供电回路中串入电流表进行监测。慢慢调高电源电压,听到继电器吸合声时,记下该吸合电压和吸合电流。为求准确,可以试多几次而求平均值。 4、测量释放电压和释放电流 也是像上述那样连接测试,当继电器发生吸合后,再逐渐降低供电电压,当听到继电器再次发生释放声音时,记下此时的电压和电流,亦可尝试多几次而取得平均的释放电压和释放电流。一般情况下,继电器的释放电压约在吸合电压的 10~50%,如果释放电压太小(小于1/10的吸合电压),则不能正常使用了,这样会对电路的稳定性造成威胁。 主要测试参数及定义表 二,JS7-A的检验仪器及检验工装 若无其他特殊要求,所有试验均在GB2421中规定的正常的试验大气条件下进行。如有特殊要求,可由供需双方协议。 对于电源没有其他的的规定,电源电压的变化率不得大于10%,直流电源电压波纹系数应不大于5%。电源极性不得相反。做好正确的,合理的,科学的检验。三,确定质量重要分度表 产品质量特性重要度 是指这些特性在产品使用中的重要程度。包括 a)安全、环保要求 b)性能、结构的使用要求, c)可靠性、使用寿命及互换性要求, d)材料性能及处理规定 e)焊接及铸、锻规定; f)尺寸、公差与配合、形状和位置公差及表面粗糙度等要求; g)外形、外观要求: b)清洁度要求: i)涂敷、包装、防护及储运等要求 产品装配真实项目说明书 一JS7-A时间继电器的机构 电磁系统、工作触头、气室、传动机构组成。 电磁机构组件:线圈铁心衔铁推板返力弹簧瞬时触头(微动开关)。空气室组件:橡皮膜活塞杠杆宝塔弹簧延时触头调节螺钉 本科实验报告 课程名称:单片机原理与接口技术实验项目:蜂鸣器驱动实验 实验地点:电机馆 专业班级:学号: 学生姓名: 指导教师: 2015年 6 月9 日 蜂鸣器驱动实验 一、实验目的 1、学习输入/输出端口控制方法 2、了解音频发声原理 二、实验说明 本实验是利用89C51端口定时器输出控制端口,驱动扬声器发声,声音的频率高低由延时快慢控制。本实验是利用单片机唱歌的声音控制程序,请用户思考如何修改程序,可以让蜂鸣器发出不同频率,不同长短的声音。 三、实验原理 1、通过单片机控制驱动信号使蜂鸣器发出不同音调的声音,驱动方波的频率越高,音调就越高;驱动方波频率越低,音调越低。由此,我们可以根据驱动方波的频率使蜂鸣器凑出各种音调的声音。 2、由于单片机I/O口的输出电流较小,因此需要三极管放大电路驱动蜂鸣器。 四、主要仪器设备 单片机仿真试验箱,THKL-C51型单片机仿真器,计算机 五、实验内容及步骤 INT1输出音频信号接音频驱动电路,使蜂鸣器的发声。 1、使用单片机最小应用系统和蜂鸣器模块。蜂鸣器模块的短路帽J1插到VCC方向,用导线将INT1接到蜂鸣器输入端。 2、用串行数据通信线连接计算机与仿真器,把仿真器插到模块的锁紧插座中,请注意仿真器的方向:缺口朝上。 3、打开Keil uVision2仿真软件,首先建立本实验的项目文件,接着添加“MUSIC.ASM”源程序,进行编译,直到编译无误。 4、全速运行程序,扬声器周期性的发出“八月桂花开”歌曲。(添加“MUSIC1.ASM”程序为“祝你平安”歌曲) 5、也可以把源程序编译成可执行文件,把可执行文件用ISP烧录器烧录到89S52/89S51芯片中运行。(ISP烧录器的使用查看附录二) 实验三继电器控制 一、实验目的 1.了解微机控制直流继电器的一般方法。 2.熟练掌握8255、8253的编程应用。 二、实验内容 1.微机控制继电器工作原理 继电器是自动控制环境里的一个重要部件,它处在电子电路的控制信号与电气电路的执行元件(如电动机等)之间,既有桥梁作用又起到电气隔离作用。 利用8255PC0输出高低电平控制三极管T2的导通与截止,从而给继电器线圈通电,产生磁场,吸合动铁心,常开触点闭合,接通继电器控制回路,以实现对外接装置的控制。 2.硬件电路图 如图3-1所示,利用8253计数器0和计数器1串联使用,CLK0接1MHz 时钟,从OUT1输出方波信号作为开关量,由8255的PA0输入,PC0口输出控制实验盒上的继电器动作。编程使用8253定时,让继电器周而复始的闭合5秒钟(指示灯亮),断开5秒钟(指示灯灭)。 图3-1 继电器控制示意图 3.硬件连线 按图3-1连接实验电路。CLK0接1MHz,GATE0,GATE1接+5V,OUT0接CLK1,OUT1接PA0,PC0接继电器驱动电路的开关输入端IK。继电器输出接口J4接实验盒上的继电器插座。 8253的CS 接280H~287H ,8255的CS 接288H~28FH 。 4.编程提示 图3-2(a )主程序 (b )延时子程序 (1)将8253计数器0设置为方式3、计数器1设置为方式0串联使用,两个计数器的初置乘积为5 000 000,启动计数器工作后,经过5秒钟OUT1输出高电平。通过8255的A 口查询OUT1的输出电平,从C 口的PC0输出开关量控制继电器动作。 (2)程序框图如图3-2。 (3)参考程序 程序清单:JDQ.ASM CODE SEGMENT ASSUME CS :CODE START : MOV DX ,28BH ;向8255写控制字 MOV AL ,90H ;设A 口输入,C 口输出 DKCT : OUT DX ,AL MOV AL ,01 ;将PC0置位 OUT DX ,AL CALL DELAY ;延时5S MOV AL ,0 ;将PC0复位 OUT DX ,AL CALL DELAY ;延时5S 中断定时蜂鸣器实验 一.实验目的 1.掌握ARM2131开发环境ADS,熟悉开发环境的常用工具以及相应功能。 2.学习建立ADS的工程文件、编译连接设置、调试操作等。 3.学习对中断向量VTC、GPIO口的设置。 4.学习定时器中断的应用 二.实验设备 PC兼容机一台,操作系统WINDOWS 2000,安装ADS1.2(ARM Developer Suite 的成熟版本) 三.实验原理 随着信息技术技术的飞速发展,ARM技术方案架构作为一种具备低功耗、高性能、以及小体积等特性的32位嵌入式微处理器,得到了众多的知识产权授权用户,其中包括世界顶级的半导体和系统公司。目前已被广泛的用于各类电子产品,汽车、消费娱乐、影像、工业控制、海量存储、网络、安保和无线等领域。被业界人士认为,基于ARM的技术方案是最具市场前景和市场优势的解决方案。LPC2131 Philips LPC2131 是基于ARM7TDMI-S 的高性能32 位RISC 微控制器,它一方面具有ARM处理器的所有优点:低功耗、高性能;同时又具有较为丰富的片上资源,非常适合嵌入式产品的开发。其特点如下: ·集成了Thumb 扩展指令集。 ·32KB可在系统中编程(ISP)的片内Flash和可在应用中编程(IAP)的8KB RAM,具有向量中断控制器。 ·2个UART,2个I2C 串行接口,2 个SPI串行接口,2 个定时器(7 个捕获/ 比较通道),PWM单元可提供多达6个PWM输出,8通道10位ADC,实时时钟RTC,看门狗定时器WDT,48 个通用I/O引脚。 ·CPU时钟高达60MHz,具有片内晶体振荡器和片内PLL。 GPIO:(General Purpose Input Output) GPIO是用来进行输入输出的,那么肯定有寄存器进行控制。对于输入的话,可以通过读取寄存器来确定引脚的高电平还是低电平;对于输出的话,可以通过写某个寄存器来让这个引脚输出高低电平.GPxCON,GPACON每一位对应着一根引脚(23根)0:代表输出;1:相应的引脚为地址线或用于地址控制对于PORT B-PORT J的话,GPxCON中每两位控制一根引脚00:输入;01:输出;10:特殊功能;11:保留。GPxDA T用于读或者写。GPxUP,1:不使用内部的上拉电阻;0:使用内部上拉电阻。 向量控制寄存器VICVectCntl0-15记录了各个通道号及其使能位。 当中断发生时,VICVectAddr0-15中的一个值会被copy到VICVectAddr. 如果是非向量中断则VICdefaultAddr被copy到VICVectAddr. 程序跳转到VICVectorAddr指向的地址。 中断返回时,写0x00到VICVectAddr. 非向量中断是指那些虽然已经打开(允许),但是没有在相应的VICVectorCntl0~15 和VICVectorAddr0~15中设置的中断。 关于中断设置: 1、首先,硬复位后所有的Special Function Registor都有默认值。不必考虑设置的顺序问题。可以先设置好中断,再开通模块功能。 #include Count = 0; // 中断计数器清 0 Addr = i *3; while(1) { Temp1 = SONG[Addr++]; if (Temp1 == 0xFF) //休止符 { TR0 = 0; Delay_xMs(100); } else if (Temp1 == 0x00) //歌曲结束符 { return; } else { Temp2 = SONG[Addr++]; TR0 = 1; while(1) { Speak = ~Speak; Delay_xMs(Temp1); if(Temp2 == Count) { Count = 0; break; } } } } }void keyscan (void)// 按键切换声音函数{ if(key1==0) { delay(10); if(key1==0) { DT-1型同步检查继电器 1 用途 DT-1型同步检查继电器用于两端供电线路的自 动重合闸线路中,以检查线路上电压的存在及线路上 和变电站汇流排上电压向量间的相角差。 2 结构和工作原理 DT-1型继电器为电磁式瞬时动作继电器,在磁系 统两个极的每一个上面装有一个由两个绕组组成的 线圈,一个线圈的一个绕组与另一个线圈的一个绕组 串联,继电器的内部接线图如图1所示。 继电器反应加在端子②-④和⑧-⑥上的电压向 量的几何差,借转动指针以改变弹簧的反作用力进行 相角差的整定,刻度以度表示。 继电器有一副动断和一副动合触点。 继电器有A11K,A11H,A11P,A11Q四种结构,外 形尺寸及安装开孔尺寸见附图。 3 技术数据图 1 DT-1内部接线图(正视) 继电器按照额定数据的规范列于表1中 继电器的型号额定电压(V) 引出端子的号码 DT-1/90 绕组1 60 ②-④绕组2 30 ⑧-⑥ DT-1/120 绕组1 60 ②-④绕组2 60 ⑧-⑥ DT-1/130 绕组1 100 ②-④绕组2 30 ⑧-⑥ DT-1/160 绕组1 100 ②-④绕组2 60 ⑧-⑥ DT-1/200 绕组1 100 ②-④绕组2 100 ⑧-⑥ 在额定电压下,当电压向量间的相角差在20°~40°范围内时继电器动作。 任一整定点上刻度准确度不大于±%。 在同一整定点上的动作值一致性不大于6%。 在额定电压下,继电器按照角度计算的返回系数不小于。 在额定电压下,继电器每个绕组所消耗的功率不大于3VA。 导电部分对于外壳的绝缘耐受2kV,50Hz交流电压历时1min试验。 在电压不大于220V,电流不大于2A,时间常数为5±的直流有感电路中,断开容量为50W,;在交流电路中触点的断开容量为250VA。 4 订货须知 a.继电器型号、名称及安装方式; b.订货数量、交货地址。 蜂鸣器和弦音发声控制 前言:现在一些带按键显示控制面板的家电(比较常见的是柜式空调)在按键操作的时候会有悦耳的和弦音发出,特别是开关机或操作上下键时会有不同变调的和弦音,相比普通的嘀嘀声给人更愉悦的操作体验。 1.控制方式说明 此处以型号为SH2225T2PA的蜂鸣器(谐振频率2.6KHz)为例。蜂鸣器模块有两个驱动引脚与MCU相连,一个是振荡信号输入引脚,由MCU提供相应频率的方波信号驱动蜂鸣器发声,一个是供电控制端,供电切断后蜂鸣器靠电解电容放电维持其发声,会有音量渐渐变小的效果。 原理图如下所示,MC9为供电控制端,MC8为振荡信号输入端。MC9为高电平时,三极管Q4导通,然后Q2导通,蜂鸣器开始供电,同时电容CD2充电。若MC8有一定频率的方波信号发出,则蜂鸣器可发出鸣叫。若此时先关掉供电,即MC9 置低电平,MC8依然发出方波信号,则蜂鸣器可依靠CD2放电发出声音,但随着电容电量减少,音量会逐渐减小,形成蜂鸣声渐隐的和弦音效果。要实现变调的效果,则可通过短时间内切换发出几种不同频率的蜂鸣声来实现。 以下是3种比较典型的和弦音的实现细节:(符号说明:Tf:频率给定持续时间(ms)Tv:电压给定持续时间(ms)F:输出频率(KHz)) 单声和弦音:短暂鸣响后音量渐隐 F=2.6,Tv=200,Tf=1000 开机和弦音:三升调,按音调分3个阶段 1.F= 2.3,Tv=200,Tf=200 2.F=2.6,Tv=200,Tf=200 3.F=2.9,Tv=100,Tf=2100 关机和弦音:三降调,按音调分3个阶段 1.F= 2.9,Tv=200,Tf=200 2.F=2.6,Tv=200,Tf=200 3.F=2.3,Tv=100,Tf=2100 2.编程实例 MCU:STM8S903K3 开发环境:STVD 4.1.6+Cosmic 4.2.8 /* buzzer.h文件*/ ?[Copy to clipboard]View Code C 1 2 3 4 5 6 #ifndef __BUZZER_H #define __BUZZER_H #include "common.h" #include "beep.h" typedef enum 三、中间继电器实验 一、实验目的 中间继电器种类很多,目前国内生产的就有二十多个系列,数百种产品。本实验选择了具有代表性的三个系列中的四种中间继电器进行实验测试,希望能通过本次实验熟悉中间继电器的实际结构、工作原理、基本特性,掌握对各类中间继电器的测试和调整方法。 二、预习与思考 1、为什么目前在一些保护屏上广泛采用DZ-30B系列中间继电器,它与DZ-10系列中间继电器比较有那些特点? 2、具有保持绕组的中间继电器为什么要进行极性检验?如何判明各绕组的同极性端子。 3、使用中间继电器一般根据哪几个指标进行选择? 4、发电厂、变电所的继电保护及自动装置中常用哪几种中间继电器? 三、原理说明 DZ—30B、 DZB—10B、DZS--10B系列中间继电器用于直流操作的各种继电保护和自动控制线路中,作为辅助继电器以增加接点数量和接点容量。 1、DZ—30B为电磁式瞬时动作继电器。当电压加在线圈两端时,衔铁向闭合位置运动,此时常开触点闭合,常闭触点断开。断开电源时,衔铁在接触片的反弹力下,返回到原始状态,常开触点断开,常闭触点闭合。继电器内部接线见图4—1 图4—1 DZ -30B 中间继电器内部接线图 2、DZB —10B 系列是具有保持绕组的中间继电器,它基于电磁原理工作,按不同要求在同一铁芯上绕有两个以上的线圈,其中DZB -11B 、12B 、13B 为电压启动、电流保持型;DZB -14B 为电流启动、电压保持型。该继电器为瞬时动作继电器。当动作电压(或电流)加在线圈两端时,衔铁向闭合位置运动,此时,常开触点闭合,常闭触点断开,断开启动电源时,由于电压(或电流)保持绕组的磁场的存在所以衔铁仍然闭合,只有保持绕组断电后,衔铁在接触片的反弹力作用下返回到原始状态,常开触点断开,常闭触点闭合。继电器内部接线见图4—2。 3、DZS —10B 系列是带有时限的中间继电器,它基于电磁原理工作。继电器分为动作延时和返回延时两种,本系列中的DZS —11B 、13B 为动作延时,DZS —12B 、14B 为返回延时继电器。在这种继电器线圈的上面或下面装有阻尼环,当线圈通电或断电时,阻尼环中感应电流所产生的磁通会阻碍主磁通 V 123456 18 171615141310DZ-31B 三 常开触点三转换触点12 119 87V 12 456 18 17 1615141310DZ-32B 六常开触点 12 119 87 继电器的测试方法精编 版 MQS system office room 【MQS16H-TTMS2A-MQSS8Q8-MQSH16898】 任务五,编写产品检验卡片 一,产品检验要求 1、测触点电阻 用万能表的电阻档,测量常闭触点与动点电阻,其阻值应为0;而常开触点与动点的阻值就为无穷大。由此可以区别出那个是常闭触点,那个是常开触点。 2、测线圈电阻 可用万能表R×10Ω档测量继电器线圈的阻值,从而判断该线圈是否存在着开路现象。 3、测量吸合电压和吸合电流 找来可调稳压电源和电流表,给继电器输入一组电压,且在供电回路中串入电流表进行监测。慢慢调高电源电压,听到继电器吸合声时,记下该吸合电压和吸合电流。为求准确,可以试多几次而求平均值。 4、测量释放电压和释放电流 也是像上述那样连接测试,当继电器发生吸合后,再逐渐降低供电电压,当听到继电器再次发生释放声音时,记下此时的电压和电流,亦可尝试多几次而取得平均的释放电压和释放电流。一般情况下,继电器的释放电压约在吸合电压的10~50%,如果释放电压太小(小于1/10的吸合电压),则不能正常使用了,这样会对电路的稳定性造成威胁。 主要测试参数及定义表 如有特殊要求,可由供需双方协议。 对于电源没有其他的的规定,电源电压的变化率不得大于10%,直流电源电压波纹系数应不大于5%。电源极性不得相反。做好正确的,合理的,科学的检验。 是指这些特性在产品使用中的重要程度。包括 a)安全、环保要求 b)性能、结构的使用要求, c)可靠性、使用寿命及互换性要求, d)材料性能及处理规定 e)焊接及铸、锻规定; f)尺寸、公差与配合、形状和位置公差及表面粗糙度等要求; g)外形、外观要求: b)清洁度要求: i)涂敷、包装、防护及储运等要求 产品装配真实项目说明书 一JS7-A时间继电器的机构 电磁系统、工作触头、气室、传动机构组成。 电磁机构组件:线圈铁心衔铁推板返力弹簧瞬时触头(微动开关)。 空气室组件:橡皮膜活塞杠杆宝塔弹簧延时触头调节螺钉 二工作原理 当线圈通电时,衔铁及推板被铁心吸引瞬时下移,使瞬时动作触点接通或者断开,但是活塞杆和杠杆不能同时跟着衔铁一起下落。应为活塞杆的上端连接这气室中的橡皮膜,当活塞杆在释放弹簧的作用下开始向下运动时,橡皮膜随之向下凹,上面空气室的空气变得稀薄而使活塞杆受到阻尼作用二缓慢下降。经过一段时间,活塞杆下降到一定的位置,便通过杠杆推动延时触点动作,使动断触点断开,动合触点闭合从线圈通电到延时触点完成动作,这段时间就是时间继电器的延时时间。延时时间的长短可以通过螺钉调节空气室进气孔的大小来改变。 三主要技术参数 1)额定工作电压380V,额定发热电流3A,额定控制电容个100VA。 2)每种型号的继电器还可分为: 按延时范围可分—60s和—180s两种 按线圈的额定电压分为:(50Hz)2436(V)六种 3)继电器使用的环境温度为—25--+40度 4)当线圈电压为额定电压85%~100%的时,继电器能可靠工作。 5)继电器在延时时间的连续动作重复误差≦15% 6)允许操作频率不大于600次/h和通电持续率为40%。 单片机蜂鸣器实验 C程序: #include "reg51.h" #define uchar unsigned char #define uint unsigned int sbit FM=P2^3; void delay ( uchar x) { uint y; for (; x > 0 x-- ) for( y=500 y>0;y--); } void main() { FM=0; while(1) { delay(20); FM=1; delay(20); FM=0; } } 因为单片机的IO口驱动能力不够让蜂鸣器发出声音,所以我们通过三极管放大驱动电流,从而可以让蜂鸣器发出声音,你要是输出高电平,三极管导通,集电极电流通过蜂鸣器让蜂鸣器发出声音,当输出低电平时,三极管截止,没有电流流过蜂鸣器,所以就不会发出声音 单片机驱动蜂鸣器原理与设计 蜂鸣器是一种一体化结构的电子讯响器,本文介绍如何用单片机驱动蜂鸣器,他广泛应用于计算机、打印机、复印机、报警器、电话机等电子产品中作发声器件。蜂鸣器主要分为压电式蜂鸣器和电磁式蜂鸣器两种类型。电磁式蜂鸣器由振荡器、电磁线圈、磁铁、振动膜片及外壳等组成。接通电源后,振荡器产生的音频信号电流通过电磁线圈,使电磁线圈产生磁场,振动膜片在电磁线圈和磁铁的相互作用下,周期性地振动发声。压电式蜂鸣器主要由多谐振荡器、压电蜂鸣片、阻抗匹配器及共鸣箱、外壳等组成。多谐振荡器由晶体管或集成电路构成,当接通电源后(1.5~15V直流工作电压),多谐振荡器起振,输出1.5~2.5kHZ的音频信号,阻抗匹配器推动压电蜂鸣片发声。下面是电磁式蜂鸣器的外形图片及结构图。。。电磁式蜂鸣器实物图:一、电磁式蜂鸣器驱动原理蜂鸣器发声原理是电流通过电磁线圈,使电磁线圈产生磁场来驱动振动膜发声的,因此需要一定的电流才能驱动它,单片机IO引脚输出的电流较小,单片机输出的TTL电平基本上驱动不了蜂鸣器,因此需要增加一个电流放大的电路。S51增强型单片机实验板通过一个三极管C8550来放大驱动蜂鸣器,原理图见下面图3:S51增强型单片机实验板蜂鸣器驱动原理图:如图所示,蜂鸣器的正极接到VCC(+5V)电源上面,蜂鸣器的负极接到三极管的发射极E,三极管的基级B经过限流电阻R1后由单片机的P3.7引脚控制,当P3.7输出高电平 时,三极管T1截止,没有电流流过线圈,蜂鸣器不发声;当P3.7输出低电平时,三极管导通,这样蜂鸣器的电流形成回路,发出声音。因此,我们可以通过程序控制P3.7脚的电平来使蜂鸣器发出声音和关闭。程序中改变单片机P3.7引脚输出波形的频率,就可以调整控制蜂鸣器音调,产生各种不同音色、音调的声音。另外,改变P3.7输出电平的高低电平占空比,则可以控制蜂鸣器的声音大小,这些我们都可以通过编程实验来验证。二、蜂鸣器列子下面我们举几个简单的单片机驱动蜂鸣器的编程和电路设计的列子。1、简单的蜂鸣器实验程序:本程序通过在P3.7输出一个音频范围的方波,驱动实验板上的蜂鸣器发出蜂鸣声,其中DELAY延时子程序的作用是使输出的方波频率在人耳朵听觉能力之内的20KHZ以下,如果没有这个延时程序的话,输出的频率将大大超出人耳朵的听觉能力,我们将不能听到声音。更改延时常数,可以改变输出频率,也就可以调整蜂鸣器的音调。大家可以在实验中更改#228为其他值,听听蜂鸣器音调的改变。 ORG 0000H AJMP MAIN ;跳转到主程序 ORG 0030H MAIN: CPL P3.7 ;蜂鸣器驱动电平取反 LCALL DELAY 延时 AJMP MAIN 反复循环 DELAY:MOV R7,#228 ;延时子程序,更改该延时常数可以改变蜂鸣器发出的音调 DE1: DJNZ R7,DE1 RET 网络高等教育《电力系统继电保护》实验报告 学习中心:奥鹏学习中心 层次:专科起点本科 专业:电气工程及其自动化 年级: 学号: 学生姓名: 实验一电磁型电流继电器和电压继电器实验 一、实验目的 1. 熟悉DL型电流继电器和DY型电压继电器的的实际结构,工 作原理、基本特性; 2. 学习动作电流、动作电压参数的整定方法。 二、实验电路 1.过流继电器实验接线图 过流继电器实验接线图 2.低压继电器实验接线图 低压继电器实验接线图 三、预习题 1.过流继电器线圈采用_串联_接法时,电流动作值可由转动刻度盘上的指针所对应的电流值读出;低压继电器线圈采用__并联 _接法时,电压动作值可由转动刻度盘上的指针所对应的电压值读出。(串联,并联) 2. 动作电流(压),返回电流(压)和返回系数的定义是什么? 答:1.使继电器返回的最小电压称为返回电压;使继电器动作的最大电压称为动作电压;返回电压与动作电压之比称为返回系数。 2.使继电器动作的最小电流称为动作电流;使继电器返回的最大电流称为返回电流;返回电流与动作电流之比称为返回系数。 四、实验内容 1.电流继电器的动作电流和返回电流测试 表一过流继电器实验结果记录表 2.低压继电器的动作电压和返回电压测试 表二低压继电器实验结果记录表 五、实验仪器设备 六、问题与思考 1.电流继电器的返回系数为什么恒小于1? 答:由于摩擦力矩和剩余力矩的存在,使得返回量小于动作量。根据返回力矩的定义,返回系数恒小于1. 2.返回系数在设计继电保护装置中有何重要用途? 答:返回系数是确保保护选择性的重要指标,让不该动作的继电器及时返回,使正常运行的部分系数不被切除。 3. 实验的体会和建议 电流保护的动作电流是按躲开最大负荷电流整定的,一般能保护相邻线路。在下一条相邻线路或其他线路短路时,电流继电器将启动,但当外部故障切除后,母线上的电动机自启动,有比较大的启动电流,此时要求电流继电器必须可靠返回,否则会出现误跳闸。所以过电流保护在整定计算时必须考虑返回系数和自起动系数,以保证在上述情况下,保护能在大的启动电流情况下可靠返回。电流速断的保护的动作电流是按躲开线路末端最大短路电流整定的,一般只能保护线路首端。在下一条相邻线路短路时,电流继电器不启动,当外部故障切除后,不存在大的启动电流情况下可靠返回问题 实验二电磁型时间继电器和中间继电器实验单片机按键控制蜂鸣器发声程序(严选参考)
电磁型时间继电器信继电器中间继电器实验指导书
继电器的测试方法
继电器的特性实验
继电器的测试方法
单片机实验报告-蜂鸣器驱动实验
实验三 继电器控制
中断定时蜂鸣器实验
单片机按键控制蜂鸣器发声程序
DT-1型同步检查继电器
蜂鸣器和弦音发声控制
继电实验4
继电器的测试方法精编版
蜂鸣器程序
电力系统继电保护实验实验报告
相关主题
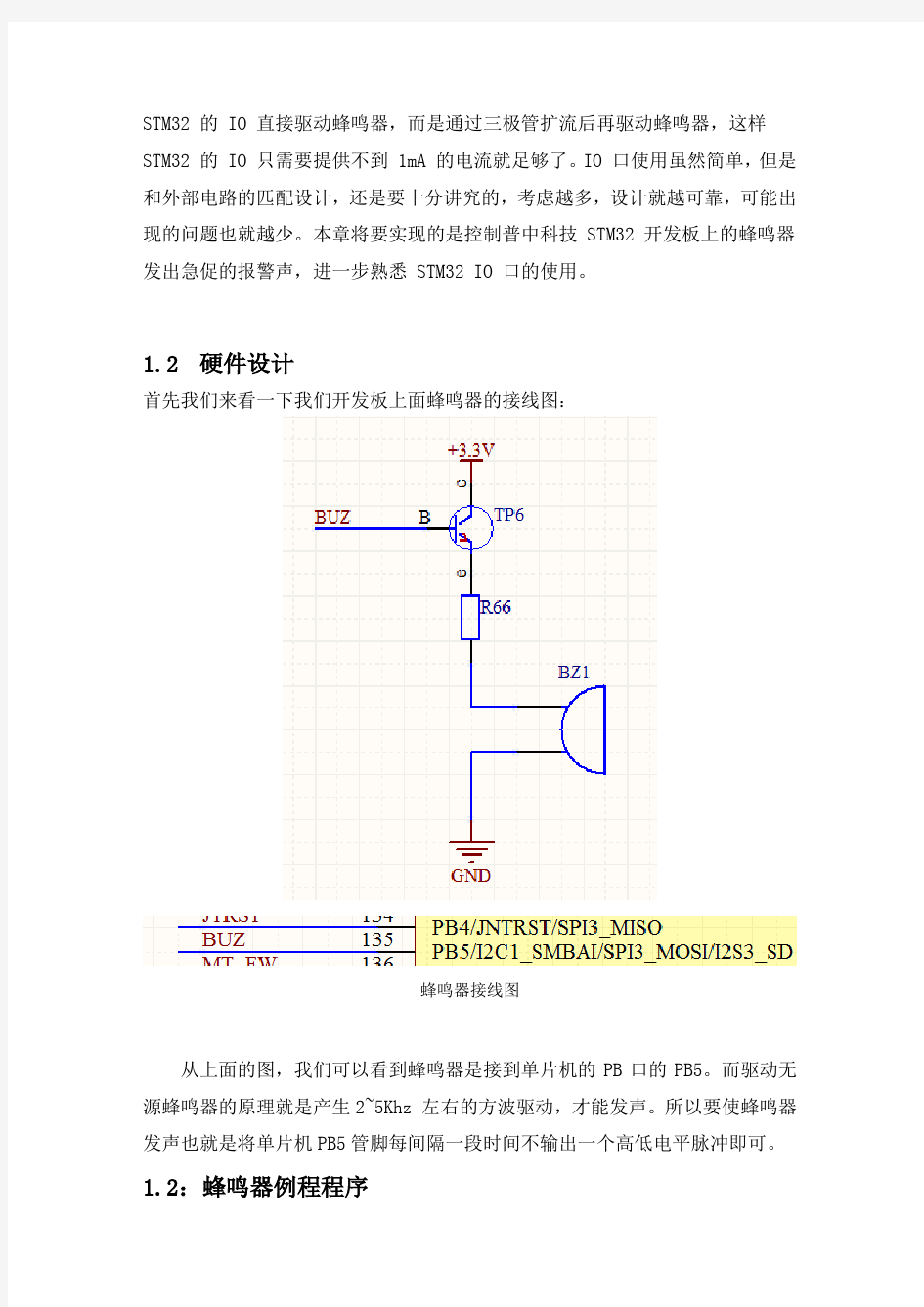
文本预览