
实习一 IDL使用环境
一、实习目的
熟悉IDL的界面并掌握IDL平台的基本操作。
二、原理与方法
无
三、实习仪器与数据
无
四、实习步骤
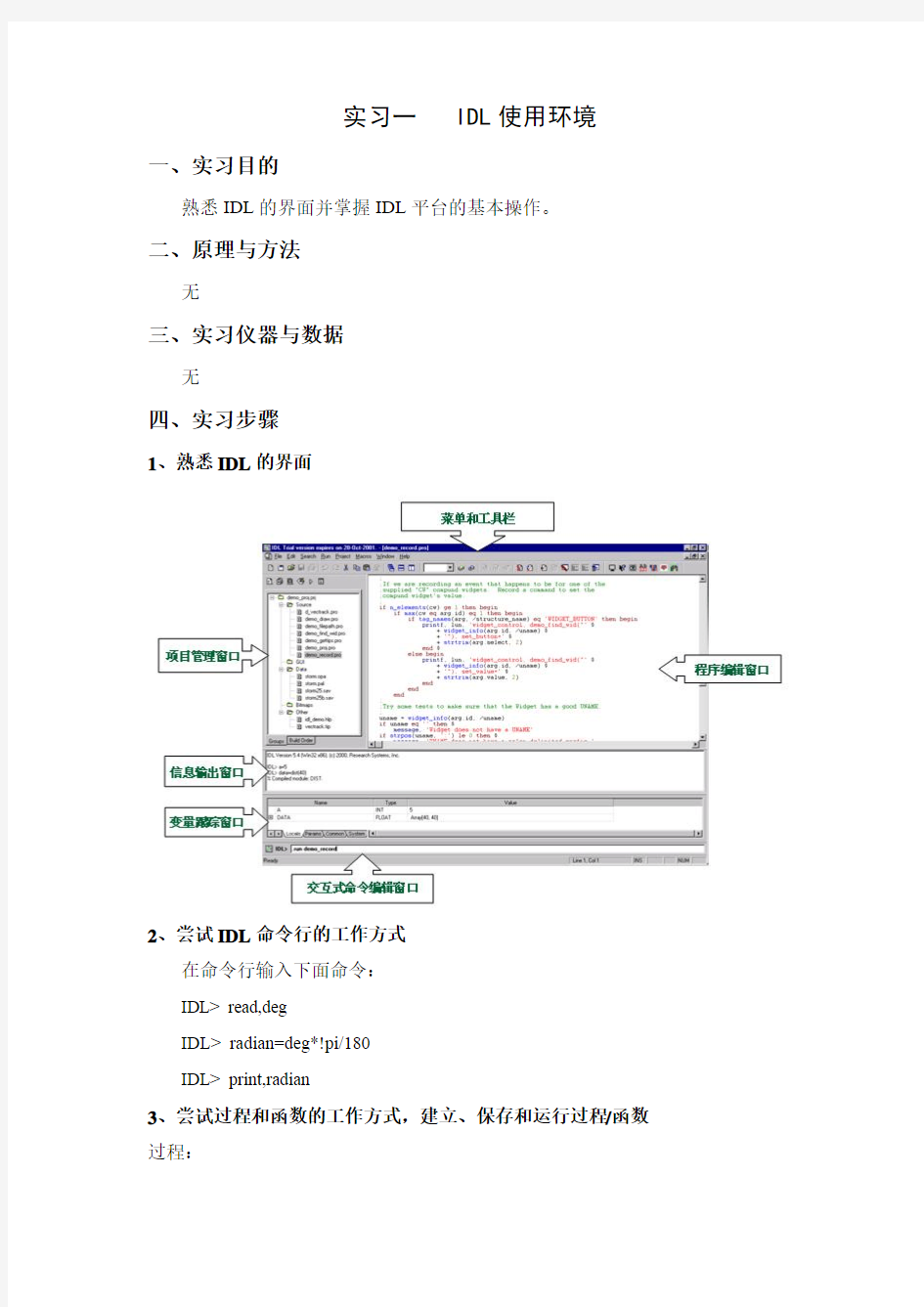
1、熟悉IDL的界面
2、尝试IDL命令行的工作方式
在命令行输入下面命令:
IDL> read,deg
IDL> radian=deg*!pi/180
IDL> print,radian
3、尝试过程和函数的工作方式,建立、保存和运行过程/函数过程:
Pro test
Read,deg
radian=deg*!pi/180
print,radian
end
函数:
function test,deg
radian=deg*!pi/180
return,radian
end
4、完成实习报告
要求包括实习目的、ENVI编程环境的基本构成、对IDL命令行、过程和函数这3种编程形式的初步认识,最好有自己初次接触ENVI软件的使用感受。
实习二 IDL基本命令
一、实习目的
掌握IDL的基本编程技巧,掌握过程和函数的编写,练习课程中讲授的基本编程知识。
二、原理与方法
无
三、实习仪器与数据
无
四、实习步骤
1、创建各种变量,并利用help函数跟踪变量类型和大小
IDL> a=1
IDL> help,a
IDL> b=3
IDL> help,b
IDL> b=-1.3
IDL> help,b
IDL> b=2e-2
IDL> help,b
IDL> c='I am a student~'
IDL> help,c
2、创建数组,
IDL> arr=[1,2,3,4]
IDL> help,arr
IDL> print,arr
IDL> arr=[[1,2,3],[4,5,6]]
IDL> help,arr
IDL> print,arr
3、创建各种表达式:数值型表达式、字符型表达式、关系型表达式等
IDL> a=2
IDL> b=3
IDL> c=3.2
IDL> print,a*2+b
IDL> print,c^2
IDL> print,9 mod 2
IDL> print,'i '+'am '+'a student'
IDL> help,a gt b
4、If语句
编程计算下面的公式并输出y的值。
pro test
x=3
if x ge 0 then begin
y=9+5*x^2
endif else begin
y=9-5*x^2
endelse
print,'y=',y
end
5、for语句
输出*的图形,最顶层为1个*,最底层为10个*,依次递增。
pro test
for i=0,9 do begin
arr=replicate('*',i+1) ;创建i+1个元素值都为”*”的一维数组
print,arr
endfor
end
6、while语句
输出*的图形,最顶层为1个*,最底层为10个*,依次递增。
pro test
while i le 9 do begin
arr=replicate('*',i+1)
print,arr
i++
endwhile
end
7、编写过程,将角度转为弧度
Pro test
deg=180
radian=deg*!pi/360
print,radian
end
8、编写函数,将角度转为弧度
function test,deg
radian=deg*!pi/360
return,radian
end
IDL> print,test(180)
1.57080
9、完成实习报告
要求包括实习目的、各种变量、数组与表达式的创建,控制语句IF、FOR、WHILE、函数和过程的基本形式。
实习三 IDL数组及运算
一、实习目的
学习IDL数组的定义、格式、下标操作,数组的基本运算,包括最值、均值、方差等,数组的查询定位操作,以及数组的重排列。
二、原理与方法
无
三、实习仪器与数据
无
四、实习步骤
1、利用函数创建数组
IDL> arr1=intarr(6)
IDL> print,arr1
IDL> arr2=indgen(6)
IDL> print,arr2
IDL> arr=indgen(2,2)
IDL> print,arr
IDL> arr=replicate(3.2,2,3)
IDL> print,arr
IDL> arr1=make_array(3,2,/byte)
IDL> arr1=make_array(3,2,/byte,/index)
IDL> print,arr1
IDL> arr1=make_array(3,2,value=12L)
IDL> print,arr1
IDL> sz=size(arr)
IDL> arr1=make_array(size=sz)
2、数组的下标操作
IDL> arr=indgen(6)
IDL> print,arr[2]
IDL> index=[2,4]
IDL> print,arr[index]
IDL> print,arr[2:4]
IDL> print,arr[*]
IDL> print,arr[3:*]
IDL> i=2
IDL> print,arr[i:i+2]
3、数组的性质,包括数组大小、类型、最大最小值、均值、方差、标准差和总和
IDL> arr=fltarr(10,20)
IDL> print,size(arr)
IDL> print,size(arr,/dimensions)
IDL> print,size(arr,/type)
IDL> print,size(arr,/n_elements)
IDL> arr=[1,3,4.2,6,-2.3,3.2]
IDL> print,max(arr),min(arr)
IDL> print,mean(arr),variance(arr),stddev(arr)
IDL> print,total(arr)
4、数组元素的定位,where函数
IDL> arr=findgen(10)
IDL> w=where(arr gt 3)
IDL> print,w
IDL> print,arr[w]
IDL> w=where((arr gt 3) and (arr lt 6))
IDL> print,w
IDL> print,arr[w]
5、数组的排序
IDL> arr=[1,3,2,5,4,7,8,6]
IDL> arr=arr[sort(arr)]
IDL> print,arr
6、完成实习报告
要求包括实习目的、数组的创建、下标操作,数组的求最大最小值、均值、方差等运算,数组的查询定位操作,以及数组的排序。
实习四 IDL读取文件
一、实习目的
熟悉IDL的文件操作基本函数,并完成Ascii格式和二进制文件的读取、基本处理与存储。
二、原理与方法
无
三、实习仪器与数据
Data.dat:2列20行的ASCII码文件。
TM_Multispce:6个波段的TM数据,400列,300行。
四、实习步骤
1、文件名的选择、文件的打开
IDL> fname=dialog_pickfile()
IDL> Directory=dialog_pickfile(/directory)
IDL> help,directory
IDL> openw,lun,fname,/get_lun
IDL> help,/file
IDL> free_lun,lun
IDL> help,/file
2、ASCII码文件的读写
读取一个ASCII码文件(2列、20行的整数数据)
pro read1,data
fn=dialog_pickfile()
openr,lun,fn,/get_lun
data=intarr(2,20)
readf,lun,data
free_lun,lun
end
读取一个2列未知行数的ASCII码文件,并将其写入另外一个ASCII码文件,两列之间用分号隔开。
pro open_write
fname=dialog_pickfile()
openr,lun,fname,/get_lun
maxrec=10000
data=intarr(2,maxrec)
i=0
while eof(lun) ne 1 do begin
temp=intarr(2)
readf,lun,temp
data[*,i]=temp
i=i+1
endwhile
data=data[*,0:i-1]
free_lun,lun
fname= dialog_pickfile()
openw,lun,fname,/get_lun
printf,lun,data,format='(i3.3,"; ",i3.3)'
free_lun,lun
end
3、打开一个6个波段的二进制图像文件
pro open1,data
ns=400
nl=300
nb=6
data=bytarr(ns,nl,nb)
fname=dialog_pickfile()
openu,lun,fname,/get_lun
readu,lun,data
free_lun,lun
end
4、将一个6个波段的多光谱遥感数据按波段保存为6个独立的文件。
pro write1,data
nb=6
tn=indgen(nb)+1
fname=string(tn,format='(i2.2)')+'.dat'
for i=0,nb-1 do begin
openw,lun,fname[i],/get_lun
writeu,lun,data[*,*,i]
free_lun,lun
endfor
end
5、完成实习报告
要求包括实习目的、Ascii格式和二进制文件的读取、基本处理与存储。
实习五 IDL绘图
一、实习目的
学习利用IDL完成二维光谱数据的处理与绘图工作,重点是曲线图的绘制与标注。
二、原理与方法
无
三、实习仪器与数据
无
四、实习步骤
1、创建一个从0~2π变化的数组x,计算出sin(x);
IDL> x=findgen(100)*2*!pi/100
IDL> y=sin(x)
2、绘制0~2π的正弦曲线图,即y随x的变化。
IDL> plot,x,y
3、利用PSym关键字将曲线图改为散点图
IDL> plot,x,y,psym=4
IDL> plot,x,y,psym=-4
4、修改曲线的线型和粗细
plot,x,y,linestyle=2
IDL> plot,x,y,linestyle=2,thick=3
5、添加坐标轴的标题
IDL> plot,x,y,xtitle='x',ytitle='sinx'
6、修改曲线图的颜色
IDL> plot,x,y,background=1,color= '0000FF'xl
IDL> plot,x,y,/nodata,background='FFFFFF'xl, color= '0000FF'xl IDL> oplot,x,y,color='FF0000'xl
7、完成实习报告
要求包括实习目的、绘制曲线图的基本语句、散点图设置、曲线线型和粗细的修改、坐标轴的添加以及曲线图色彩的设置。。
实习六 IDL 图像基本操作
一、实习目的
IDL 读取多种格式的图像文件,如bmp 、jpg 等,以灰度和彩色模式显示图像,并对图像进行缩放等调整。
二、原理与方法
无
三、实习仪器与数据
TM_image.jpg :jpg 格式的彩色遥感图像
四、实习步骤
1、通过Read_image 函数读取jpg 图像
IDL> fn=dialog_pickfile()
IDL> im=read_image(fn)
IDL> help,im
2、通过Write_image 函数写入IDL 支持的任何图像文件,如bmp 、jpg 、png 等
IDL> fn=dialog_pickfile()
IDL> write_image,fn,'png',im
3、显示图像
IDL> tvscl,im[0,*,*]
IDL> tv, im[0,*,*]
IDL> tv,im,true=1
4、调整图像显示窗口尺寸
IDL> sz=size(im)
IDL> window,xsize=sz[2],ysize=sz[3]
IDL> tv,im[0,*,*]
5、显示RGB图像
IDL> tv,im,true=1
6、图像尺寸的改变
IDL> im1=congrid(im,3,200,400)
7、利用转置运算实现BSQ、BIL和BIP3种存放格式的转换。
IDL> help,im
IDL> help,transpose(im,[1,2,0])
IDL> help,transpose(im,[1,0,2])
8、完成实习报告
要求包括实习目的、图像的读写操作、图像的灰度显示和彩色显示、图像显示窗口的调整、图像尺寸的改变、BSQ、BIL和BIP3种存放格式的转换。
实习七 IDL与ENVI结合编程
一、实习目的
利用ENVI打开遥感影像,导入IDL处理,并把处理完的IDL数据导出到ENVI。在ENVI环境下调用IDL函数完成相应的遥感图像处理功能。以叶面积指数LAI的计算为例。
二、原理与方法
根据NDVI和土地覆盖图利用经验公式计算LAI
Landcover 编码表 1:Water ; 2:veg1; 3:veg2
LAI 计算公式
0=water LAI 水体
?????>≤≤??<=825.0606.6825
.0125.0)37.4exp(1836.0125.001NDVI NDVI NDVI NDVI LAI veg
?????>≤≤??<=825.0091.6825
.0125.0)96.4exp(0884.0125.002
NDVI NDVI NDVI NDVI LAI veg 三、实习仪器与数据
Landcover :土地覆盖数据
Landcover.hdr :土地覆盖数据的头文件
NDVI :植被指数数据
NDVI.hdr :植被指数数据的头文件
四、实习步骤
1、编写LAI 计算函数
function lai_cal,ndvi,landcover
;计算LAI 的函数
sz=size(ndvi)
result=make_array(size=sz)
w1=where(landcover eq 1 or ndvi lt 0.125)
w2=where(landcover eq 2 and ndvi ge 0.125 and ndvi le 0.825)
w3=where(landcover eq 2 and ndvi gt 0.825)
w4=where(landcover eq 3 and ndvi ge 0.125 and ndvi le 0.825)
w5=where(landcover eq 3 and ndvi gt 0.825)
result[w1]=0
result[w2]=0.1836*exp(4.37*NDVI[w2])
if w3 ne -1 then result[w3]=6.606
result[w4]=0.0884*exp(4.96*NDVI[w4])
if w5 ne -1 then result[w5]=6.091
return,result
end
2、ENVI与IDL的数据交互
在ENVI中打开NDVI和土地覆盖数据,并将数据传到IDL工作空间,在命令行格式下调用LAI计算函数,得到LAI,并将结果传回ENVI,保存,并编辑头文件
3、ENVI环境下调用IDL函数
在ENVI的Band math对话框中,调用LAI计算函数,得到LAI结果
4、完成实习报告
要求包括实习目的、LAI计算函数的编写、ENVI与IDL的数据交互以及在ENVI中调用IDL函数的操作。
实习心得体会 遥感是一门理论性和实践性都很强大的专业课,需要我们在课堂上学习了理论知识后进行上机实验,以加深对所学知识的了解。 几何纠正这次试验本来是我们上周的自主完成试验,我用自己在网上下载的数据按照试验实验指导书上的要求做了一遍,在选点的时候选择了七个点,完成试验后也不知道怎样判断自己纠正的图像到底对不对,只是发现最终的生成结果中有一个4K大小的东西,结果是我做错了,这次,跟着老师做了一遍试验后,我对ERDAS这个软件有了一定的认识,并且顺利的完成了几何纠正,也意识到上次做实验时我的错误,首先,我打开来的两张图片并不都是img格式的,我没有将他们进行转换就进行的纠正,其次,我并没有完全理解课本上的纠正过程。我们选点的时候要选择六个以上的点,用来完成建模过程,然后其余的点可以用来对建立的模型进行检验以及纠正,我选则的七个点,纠正的结果应该是很差的。 然后,在这次试验课上,老师首先给我们介绍了ERDAS软件,然后,带着我们完成的做了一遍试验,试验由以下几部分组成: (1)显示图像文件(Display Image Files) (2)启动几何校正模块(Geometric Correction Tool) (3)启动控制点工具(Start GCP Tools) (4)采集地面控制点(Ground Control Point) (5)采集地面检查点(Ground Check Point) (6)计算转换模型(Compute Transformation) (7)图像重采样(Resample the Image) (8)保存几何校正模式(Save rectification Model) (9)检验校正结果(Verify rectification Result) 其中,最值得一说的是寻找控制点以及检查点,在寻找过程中,刚开始寻找是很慢的,图像看上去黑乎乎的,完全找不到自己想找的点,后来,顺着河流,道路的交叉点,很顺利的找到了自己想要找的点,在超过六个点以后找点时就方便了很多,在第一张图片上找点自己想要找的点,然后第二张图片上会自动匹配出点的位置,我们要寻找的范围缩小了很多,这时,我们要做的只剩下看看它匹配的准不准,如果不准,我们将点拖动到准确的点上即可。 第一次试验结束了,首先我对ERDAS这个软件有了一个认识,其次,我觉得要完成一个好的试验,我们对理论知识一定要有很深刻的认识,不然我们就像无头苍蝇,成为了一个工具,只是在做,却不知道自己在做什么,自己在哪边做错了也不知道,在自主完成试验之后,老师带领我们在做一遍,我们对试验的认识以及理论知识的了解会上升到另外一个高度,这样的实践教学对我们的学习应该会有很大的帮助。
1.利用Mapgis进行图像校正 1.1实验目的 了解MAPGIS土地利用数据建库对数据的基本要求。掌握图像校正---DRG生产的具体操作步骤。 1.2实验基本要求 将两幅1/万影像数据k50g092035、k50g092036,进行图象校正。 1.3实验内容 DRG生产的操作步骤如下: 1.打开mapgis主菜单,选择图像处理\图象分析模块。 2.文件转换:打开文件\数据输入,将两幅tif图像转换成msi(mapgis图象格式)文件类型。 选择“转换数据类型”为“TIF文件”,点“添加目录”选择影象所在目录,点“转换”。 3. 选择文件\打开影象,打开转换好的msi文件k50g092035.msi,再选择镶嵌融合\DRG生产\图幅生成控制点,点“输入图幅信息”。 4.输入图幅号信息,输入图幅号 k50 g092035,系统会利用此图幅号自动生成图幅的理论坐标。 图1.1 图幅生成控制点 5.定位内图廓点,建立理论坐标和图象坐标的对应关系。 利用放大、缩小、移动等基本操作在图像上确定四个内图廓点的位置。以定位左上角的内图廓点为例:利用放大,缩小,移动等操作找到左上角的内图廓点的精确位置后,点击上图对话框中的左上角按钮,然后再点击图像上左上角的内图廓点即完成该点的设置。完成参数设置和内图廓点信息的输入后,点击生成GCP,将自动计算出控制点的理论坐标,并根据理论坐标反算出控制点的图像坐标。 6.顺序修改控制点。 选取镶嵌融合\DRG生产\顺序修改控制点,则弹出控制点修改窗口,如下图所示:
图1.2 控制点修改窗口 7.逐格网校正 选取镶嵌融合\DRG生产\逐格网校正,弹出文件保存对话框,输入结果影像文件名为“K50 G 092035”,点“保存”。出于精度考虑,可以将“输出分辨率” 设置为“300”DPI。 8.DRG生产完毕。为了以后线文件要与内图框闭合成区,接着生成单线内图框。 生成单线内图框的方法如下: 1)选择镶嵌融合\ 打开参照文件\自动生成图框 2)输入图幅号,选择北京54坐标系.采用大地坐标系 3)选择单线内框.椭球参数选择北京54图框文件名保存为2035.WL,保存路径如下图如示,点“确定”即可完成。 图1.3 1:1万图框 用同样的方法校正另一幅影像k50g092036,将校正后的文件保存为k50 g 092036,同时生成对应的内图框文件2036.wl,保存在实习数据\单线内图框\。
实验五遥感图像滤波 一、实验目的 1、了解图像滤波中空间信息增强的定义 2、掌握图像空间域滤波最基本的处理方法 3、了解图像频率域滤波中空间信息增强的含义 4、掌握图像频率域滤波基本的方法和过程 二、实验内容 1、对实验区TM单波段数据进行空间滤波处理 2、对图像进行空间域滤波并分析其效果 分析效果可以在“viewer”视窗口,亦可以用假彩色合成的方法对比前后的变换。 3、对实验区TM单波段数据进行频率域滤波处理 4、对图像进行频率域滤波并分析其效果 空间域与频率域的转换,频率图像编辑器的使用,高通和低通滤波,在“viewer”视窗口,亦可以用假彩色合成的方法对比前后的变换。 三、实验条件 电脑、ERDAS9.2软件。厦门市TM遥感影像 四、实验步骤 卷积增强是将整个图像按照像素分块进行平均处理,用于改变图像的空间频率特征。卷积处理的关键在于卷积(核)算子(Kernal)——系数矩阵的选择,常用的卷积算子分为3*3,5*5,7*7三组,每组有包括edge detect(边缘检测)、edge enhance(边缘增强)、low pass (低通滤波)、high pass(高通滤波)、horizonal(水平边缘检测)、vertical(垂直边缘检测)、cross edge detection(交叉边缘检测)、summary等8种不同的处理方式 1、空间域滤波操作 在ERDAS面板上,选择“interpreter”-“spatial enhancement”-“convolution”命令,打开图像卷积对话框,对图像进行空间域滤波。 1)在打开的卷积增强对话框中,加载图像(input file),单波段或合成图像均可。本实验中选择单波段数据。 2)在图像平滑或图像锐化的卷积算子(kernal)选择滤波算子。
西北农林科技大学 ERDAS实验报告 专业班级:地信111 姓名:杨登贤 学号:2011011506 2013/12/20 ERDAS实验报告
一.设置一张三维图。 (3) 1.底图与三维图 (3) 2.参数设置 (5) (1)三维显示参数 (5) (2)三维视窗信息参数 (6) (3)太阳光源参数 (6) (4)显示详细程度 (6) (5)观测位置参数 (7) 二.(几何纠正几何畸变图像处理):几何纠正结果图。 (7) (2)选择合适的坐标变换函数(即几何校正数学模型) (8) (3)数据控制点采集表 (9) (4)多项式模型参数 (9) (5)图像重采样参数 (10) (6)结果图 (10) 三.(数据输入\ 输出):镶嵌图(根据不同条件做出不同的几张)。 (11) 1.图像色彩校正设置 (12) 四.(图像增强处理):傅里叶高通/低通滤波图或效果图空间增强效果图。 (13) 1.空间增强卷积处理 (13) (1)原图像 (13) (2)卷积增强设置参数 (13) (3)卷积增强处理图像 (14) 2.傅里叶变换 (14) (1)快速傅里叶变换设置参数 (14) (2)低通滤波 (15) (3)高通滤波 (16) 五.光谱增强。 (18) 1.主成分变换 (18) (1)参数设置 (18) (2)处理图像 (19) 2.缨帽变换 (19) (1)参数设置 (19) (2)处理图像 (20) 3.指数计算 (20) (1)参数设置 (20) (2)处理图像 (21) 4.真彩色变换 (21) (1)参数设置 (21) (2)处理图像 (22) 六.(非监督分类):非监督分类结果图分类后处理结果图去除分析结果图。 (23) 1.参数设置 (23) 2.非监督分类结果图 (24) 3.分类后处理结果图 (25)
数学建模常用的十大算法==转 (2011-07-24 16:13:14) 转载▼ 1. 蒙特卡罗算法。该算法又称随机性模拟算法,是通过计算机仿真来解决问题的算法,同时可以通过模拟来检验自己模型的正确性,几乎是比赛时必用的方法。 2. 数据拟合、参数估计、插值等数据处理算法。比赛中通常会遇到大量的数据需要处理,而处理数据的关键就在于这些算法,通常使用MA TLAB 作为工具。 3. 线性规划、整数规划、多元规划、二次规划等规划类算法。建模竞赛大多数问题属于最优化问题,很多时候这些问题可以用数学规划算法来描述,通常使用Lindo、Lingo 软件求解。 4. 图论算法。这类算法可以分为很多种,包括最短路、网络流、二分图等算法,涉及到图论的问题可以用这些方法解决,需要认真准备。 5. 动态规划、回溯搜索、分治算法、分支定界等计算机算法。这些算法是算法设计中比较常用的方法,竞赛中很多场合会用到。 6. 最优化理论的三大非经典算法:模拟退火算法、神经网络算法、遗传算法。这些问题是用来解决一些较困难的最优化问题的,对于有些问题非常有帮助,但是算法的实现比较困难,需慎重使用。 7. 网格算法和穷举法。两者都是暴力搜索最优点的算法,在很多竞赛题中有应用,当重点讨论模型本身而轻视算法的时候,可以使用这种暴力方案,最好使用一些高级语言作为编程工具。 8. 一些连续数据离散化方法。很多问题都是实际来的,数据可以是连续的,而计算机只能处理离散的数据,因此将其离散化后进行差分代替微分、求和代替积分等思想是非常重要的。 9. 数值分析算法。如果在比赛中采用高级语言进行编程的话,那些数值分析中常用的算法比如方程组求解、矩阵运算、函数积分等算法就需要额外编写库函数进行调用。 10. 图象处理算法。赛题中有一类问题与图形有关,即使问题与图形无关,论文中也会需要图片来说明问题,这些图形如何展示以及如何处理就是需要解决的问题,通常使用MA TLAB 进行处理。 以下将结合历年的竞赛题,对这十类算法进行详细地说明。 以下将结合历年的竞赛题,对这十类算法进行详细地说明。 2 十类算法的详细说明 2.1 蒙特卡罗算法 大多数建模赛题中都离不开计算机仿真,随机性模拟是非常常见的算法之一。 举个例子就是97 年的A 题,每个零件都有自己的标定值,也都有自己的容差等级,而求解最优的组合方案将要面对着的是一个极其复杂的公式和108 种容差选取方案,根本不可能去求解析解,那如何去找到最优的方案呢?随机性模拟搜索最优方案就是其中的一种方法,在每个零件可行的区间中按照正态分布随机的选取一个标定值和选取一个容差值作为一种方案,然后通过蒙特卡罗算法仿真出大量的方案,从中选取一个最佳的。另一个例子就是去年的彩票第二问,要求设计一种更好的方案,首先方案的优劣取决于很多复杂的因素,同样不可能刻画出一个模型进行求解,只能靠随机仿真模拟。 2.2 数据拟合、参数估计、插值等算法 数据拟合在很多赛题中有应用,与图形处理有关的问题很多与拟合有关系,一个例子就是98 年美国赛A 题,生物组织切片的三维插值处理,94 年A 题逢山开路,山体海拔高度的插值计算,还有吵的沸沸扬扬可能会考的“非典”问题也要用到数据拟合算法,观察数据的
目录 实验一ENVI窗口的基本操作 (1) 实验二认识遥感影像 (7) 实验三图像的彩色增强与色彩变换 (8) 实验四遥感影像的目视解译与制图 (13) 实验五遥感影像的计算机解译 (17)
实验一ENVI窗口的基本操作 一、实验目的 熟悉ENVI软件的窗口操作方法,掌握影像信息、像元信息浏方法,影像上距离和面积量算方法。 二、实验内容 1、熟悉遥感图像处理软件ENVI的窗口基本操作。 2、查看影像信息和像元信息。 3、距离测量与面积测量。 三、实验条件 电脑、ENVI4.5软件,厦门市TM遥感影像。 四、实验步骤 1、启动ENVI软件,界面如图1。 图1 ENVI软件界面 2、打开遥感影像,File → Open Image File,界面如图2。在打开文件对话框中,定位到存放影像数据的文件夹(如:预先下载的厦门市TM影像),打开遥感影像数据。 图2 打开影像文件 3、在自动打开的可用波段列表中,用“Load Band” 装载影像数据,显示三个影像窗口,如图3。 主图像窗口:主图像窗口由一幅以全分辨率显示的图像的一部分组成。该窗口在你第一次载入一幅图像时自动显示。窗口的原始大小由配置文件中(envi.cfg)的参数设置,窗口大小能动态缩放和调整。在主图像窗口中的功能
菜单条包括5 个下拉菜单,控制所有的ENVI 交互显示功能。 滚动窗口:滚动窗口是显示整幅影像的显示窗口,当显示的图像比主图像窗口以全分辨率能显示的图像大时出现滚动窗口,滚动窗口控制着显示在主图像窗口的图像部分。滚动窗口位置和大小初始值在envi.cfg 文件中设置并且可以被修改,也可以动态缩放。 缩放窗口:缩放窗口是一个小的图像显示窗口,显示主图像窗口的一部分。缩放窗口提供无限缩放能力,缩放系数出现在窗口标题栏的括号中。缩放窗口大小能动态地调整,其大小和默认的缩放系数同样在envi.cfg 文件进行设置。
遥感原理与应用 实验报告 姓名:学号:学院:专业: 年月日 实验一: erdas视窗的认识实验 一、实验目的 初步了解目前主流的遥感图象处理软件erdas的主要功能模块,在此基础上,掌握几个视窗操作模块的功能和操作技能,为遥感图像的几何校正等后续实习奠定基础。 二、实验步骤 打开imagine 视窗 启动数据预处理模块 启动图像解译模块 启动图像分类模块 imagine视窗 1.数据预处理(data dataprep) 2.图像解译(image interpreter) 主成份变换 色彩变换 3.图像分类(image classification) 非监督分类 4. 空间建模(spatial modeler) 模型制作工具 三、实验小结 通过本次试验初步了解遥感图象处理软件erdas的主要功能模块,在此基础上,基本掌握了几个视窗操作模块的功能和用途。为后续的实验奠定了基础。 实验二遥感图像的几何校正 掌握遥感图像的纠正过程 二、实验原理 校正遥感图像成像过程中所造成的各种几何畸变称为几何校正。几何校正就是将图像数据投影到平面上,使其符合地图投影系统的过程。而将地图投影系统赋予图像数据的过程,称为地理参考(geo-referencing)。由于所有地图投影系统都遵循一定的地图坐标系统,因此几何校正的过程包含了地理参考过程。 几何校正包括几何粗校正和几何精校正。地面接收站在提供给用户资料前,已按常规处理方案与图像同时接收到的有关运行姿态、传感器性能指标、大气状态、太阳高度角对该幅图像几何畸变进行了几何粗校正。利用地面控制点进行的几何校正称为几何精校正。一般地面站提供的遥感图像数据都经过几何粗校正,因此这里主要进行一种通用的精校正方法的实验。该方法包括两个步骤:第一步是构建一个模拟几何畸变的数学模型,以建立原始畸变图像空间与标准图像空间的某种对应关系,实现不同图像空间中像元位置的变换;第二步是利用这种对应关系把原始畸变图像空间中全部像素变换到标准图像空间中的对应位置上,完成标准图像空间中每一像元亮度值的计算。 三、实验内容 根据实验的数据,对两张图片进行几何纠正 四、实验流程
数学建模10种常用算法 1、蒙特卡罗算法(该算法又称随机性模拟算法,是通过计算机仿真来解决问题的算法,同时可以通过模拟可以来检验自己模型的正确性,是比赛时必用的方法) 2、数据拟合、参数估计、插值等数据处理算法(比赛中通常会遇到大量的数据需要处理,而处理数据的关键就在于这些算法,通常使用Matlab作为工具) 3、线性规划、整数规划、多元规划、二次规划等规划类问 题(建模竞赛大多数问题属于最优化问题,很多时候这些问题可以用数学规划算法来描述,通常使用Lindo、Lingo软件实现) 4、图论算法(这类算法可以分为很多种,包括最短路、网络流、二分图等算法,涉及到图论的问题可以用这些方法解决,需要认真准备) 5、动态规划、回溯搜索、分治算法、分支定界等计算机算法(这些算法是算法设计中比较常用的方法,很多场合可以用到竞赛中) 6、最优化理论的三大非经典算法:模拟退火法、神经网络、遗传算法(这些问题是用来解决一些较困难的最优化问题的算法,对于有些问题非常有帮助,但是算法的实现比较困难,需慎重使用) 7、网格算法和穷举法(网格算法和穷举法都是暴力搜索最优点的算法,在很多竞赛题中有应用,当重点讨论模型本身而轻视算法的时候,可以使用这种暴力方案,最好使用一些高级语言作为编程工具) 8、一些连续离散化方法(很多问题都是实际来的,数据可以是连续的,而计算机只认的是离散的数据,因此将其离散化后进行差分代替微分、求和代替积分等思想是非常重要的) 9、数值分析算法(如果在比赛中采用高级语言进行
编程的话,那一些数值分析中常用的算法比如方程组 求解、矩阵运算、函数积分等算法就需要额外编写库 函数进行调用) 10、图象处理算法(赛题中有一类问题与图形有关, 即使与图形无关,论文中也应该要不乏图片的,这些 图形如何展示以及如何处理就是需要解决的问题,通 常使用Matlab进行处 参数估计 C.F. 20世纪60年代,随着电子计算机的 。参数估计有多种方法,有最小二乘法、极大似然法、极大验后法、最小风险法和极小化极大熵法等。在一定条件下,后面三个方法都与极大似然法相同。最基本的方法是最小二乘法和极大似然法. 基本介绍 参数估计(parameter 尽可能接近的参数 误差 平方和 θ,使已知数据Y 最大,这里P(Y│θ)是数据Y P(Y│θ)。在实践中这是困难的,一般可假设P(Y│θ
1.高光谱分辨率遥感:用很窄(0.01波长)而连续的光谱通道对地物持续遥感成像的技术。在可见光、近红外、短波红外和热红外波段其光谱分辨率高达纳米(nm)数量级,通常具有波段多的特点,光谱通道数多达数十甚至数百个以上,而且各光谱通道间往往是连续的。 2.高光谱遥感特点:波段多,数据量大;光谱范围窄(高光谱分辨率);在成像范围内连续成像;信息冗余增加 3. 高光谱遥感的发展趋势(1)遥感信息定量化(2)“定性”、“定位”一体化快速遥感技术 4.光谱特征的产生机理:在绝对温度为0K以上时,所有物体都会发射电磁辐射,也会吸收、反射其他物体发射的辐射。高光谱遥感准确记录电磁波与物质间的这种作用随波长大小的变化,通过反映出的作用差异,提供丰富的地物信息,这种信息是由地物的宏观特性和微观特性共同决定的。宏观特性:分布、粗糙度、混杂微观特性:物质结构 6.典型地物反射:水体的反射主要在蓝绿光波段,其他波段吸收都很强,特别到了近红外波段,吸收就更强,所以水体在遥感影像上常呈黑色。 植被的反射波谱特征:①可见光波段有一个小的反射峰,位置在0.55um处,两侧 0.45um(蓝)和0.67um(红)则有两个吸收带。这一特征是叶绿素的影响。②在近红外波段(0.7-0.8um)有一反射的“陡坡”(被称为“红边”),至1.1um附近有一“峰值”,形成植被的独有特征。这一特征由于植被结构引起。③在中红外波段(1.3-2.5um) ,反射率大大下降,特别以1.45um和1.95um为中心是水的吸收带,形成低谷。 土壤:由于土壤反射波谱曲线呈比较平滑的特征,所以在不同光谱段的遥感影像上,土壤的亮度区别不明显.自然状态下土壤表面的反射率没有明显的峰值和谷值,一般来讲土质越细反射率越高,有机质含量越高和含水量越高反射率越低,此外土类和肥力也会对反射率产生影响。 6.野外光谱测量的影响因素(1)大气透射率(2)水蒸气3)风(4)观测几何 7.地面光谱的测量方法:实验室测量,野外测量 8.垂直与野外测量的区别:垂直测量:为使所有数据能与航空、航天传感器所获得的数据进行比较,一般情况下测量仪器均用垂直向下测量的方法,以便与多数传感器采集数据的方向一致。由于实地情况非常复杂,测量时常将周围环境的变化忽略,认为实际目标与标准板的测量值之比就是反射率之比。 野外测量(非垂直测量):在野外更精确的测量是测量不同角度的方向反射比因子。 凝视时间:探测器的瞬时视场角扫过地面分辨单元的时间称为凝视时间(dwell time)。探测器的凝视时间在数值上等于行扫描时间除以每行的像元个数。凝视时间越长,进入探测器的能量越多,光谱响应越强,图像信噪比越高。 光谱图像立方体:空间平面:O-XY平面;线光谱平面:O-XZ,O-YZ平面 9.高光谱遥感图像数据表达:A.光谱图像立方体 B.二维光谱曲线 C. 三维光谱曲面 10.空间成像方式:(1)摆扫型成像光谱仪:定义:它由光机左右摆扫和飞行平台向前运动完成二维空间成像,其线列探测器完成每个瞬时视场像元的光谱维获取。原理:45斜面的扫描镜,电机进行360旋转,旋转水平轴与遥感平台前进方向平行,扫描镜扫描运动方向与遥感平台运动方向垂直,光学分光系统形成色散光源再汇集到探测器上,这样成像光谱仪所获取的图像就具有了两方面的特性:光谱分辨率与空间分辨率。 (2)推扫型成像光谱仪:定义:采用一个面阵探测器,其垂直于运动方向在飞行平台向前运动中完成二维空间扫描;平行于平台运动方向,通过光栅和棱镜分光,完成光谱维扫描。它的空间扫描方向就是遥感平台运动方向。原理:垂直于运动方向完成空间维扫描,平行于运动方向完成光谱维扫描。 (3)两者的优缺点:摆扫型成像光谱仪的优点:A.FOV 大;B.探测元件定标方便,数据稳
合肥工业大学资源与环境工程学院 《遥感图像处理与分析》 实验报告(七) 姓名 学号 专业 班级 任课教师
实验七:图像分类 一、实验目的 理解计算机图像分类的基本原理 掌握数字图像非监督分类以及监督分类的具体方法和过程 理解两种分类方法的区别 二、实验材料 Landsat遥感影像1幅 ERDAS IMAGINE9.2遥感图像处理软件 计算机 三、实验内容及步骤 (一)非监督分类 (1)启动非监督分类模块:在ERDAS面板工具中选择DA TAPrep-Unsupervisd Classification命令,打开非监督分类对话框或是在ERDAS面板工具中选择 Classifier-Classification-Unsupervised Classification打开非监督分类对话框(2)选择图像处理文件和输出文件,设置被分类的图像和分类结果,并选择生成分类模块文件产生一个模版文件。 (3)这里Number of Classes定为14,Maximum Iterations定为7如下图所示 (4)点击OK按钮,执行非监督分类,打开原图与结果图:
分类评价: (1) 打开原始图像和分类后的图像:点击ERDAS-Viewer 面板,先后打开原始图像和分 类后的图像,在打开分类结果图像时,在Raster Option 选项卡中取消选中的Clear Display 复选框,保证两幅图叠加显示 (2) 设置各类别的颜色:单击Raster-Tool ,打开Raster 工具面板,选择Raster-Attributes , 打开Raster Attribute Editor 对话框 (3) 调整字段显示顺序,在Raster Attribute Editor 窗口,选择Edit 菜单-Column Properties 命令,打开Column Propertis 对话框,在Columns 列表中选择字段,通过Up 、Down 、Top 、Bottom 按钮调整其在属性表的显示顺序 (4) 同上,在Raster Attribute Editor 对话框中单击某一类别的Color 字段,在弹出的As Is 中选择合适的颜色 (5) 确定类别精度并标注类别:在Raster Attribute Editor 对话框中点击Opacity 字段名, 进入编辑状态,依据需要输入0(透明)或1(不透明)。通过在Utility 菜单下设置分类结果在原始图像背景上闪烁(Flick )、卷帘显示(Swipe )、或混合显示(Blend ),
数学建模有下面十种常用算法, 可供参考: 1.蒙特卡罗算法(该算法又称随机性模拟算法,是通过计算机仿真来解决问 题的算法,同时可以通过模拟可以来检验自己模型的正确性,是比赛时必用的方法) 2.数据拟合、参数估计、插值等数据处理算法(比赛中通常会遇到大量的数 据需要处理,而处理数据的关键就在于这些算法,通常使用Matlab作为工具) 3.线性规划、整数规划、多元规划、二次规划等规划类问题(建模竞赛大多 数问题属于最优化问题,很多时候这些问题可以用数学规划算法来描述,通常使用Lindo、Lingo软件实现) 4.图论算法(这类算法可以分为很多种,包括最短路、网络流、二分图等算 法,涉及到图论的问题可以用这些方法解决,需要认真准备) 5.动态规划、回溯搜索、分治算法、分支定界等计算机算法(这些算法是算 法设计中比较常用的方法,很多场合可以用到竞赛中) 6.最优化理论的三大非经典算法:模拟退火法、神经网络、遗传算法(这些 问题是用来解决一些较困难的最优化问题的算法,对于有些问题非常有帮助,但是算法的实现比较困难,需慎重使用) 7.网格算法和穷举法(网格算法和穷举法都是暴力搜索最优点的算法,在很 多竞赛题中有应用,当重点讨论模型本身而轻视算法的时候,可以使用这种暴力方案,最好使用一些高级语言作为编程工具) 8.一些连续离散化方法(很多问题都是实际来的,数据可以是连续的,而计 算机只认的是离散的数据,因此将其离散化后进行差分代替微分、求和代替积分等思想是非常重要的) 9.数值分析算法(如果在比赛中采用高级语言进行编程的话,那一些数值分 析中常用的算法比如方程组求解、矩阵运算、函数积分等算法就需要额外编写库函数进行调用) 10.图象处理算法(赛题中有一类问题与图形有关,即使与图形无关,论文中 也应该要不乏图片的,这些图形如何展示以及如何处理就是需要解决的问题,通常使用Matlab 进行处理)
《ENVI》实训指导书 ENVI快速入门 一、软件概况介绍: ENVI(The Environment for Visualizing Images)遥感影像处理软件是由美国著名的遥感科学家用IDL开发的一套功能齐全的遥感影像处理软件,它是处理、分析并显示多光谱数据、高光谱数据和雷达数据的高级工具。曾获2000、2001年美国权威机构NIMA遥感软件测评第一。 ENVI的应用领域包括:地质、林业、农业、模式识别、军事、自然资源勘探、海洋资源管理、环境和土地利用管理等。 二、ENVI的安装 1、ENVI永久许可 1)ENVI浮动license:服务器版,多个用户可以同时访问一个服务器,服务器需要安装license,客户端不需要安装license,但是需要进行设置。 2)ENVI加密狗:加密狗也需要license安装,但是有灵活、不依赖网卡的特点。 3)ENVI网卡加密:利用网卡号的唯一性进行加密,如果更换机器时,需要将原来的网卡拔下重新安装在新机器上。 2、ENVI临时许可 三、目录结构介绍 一般情况下ENVI安装在RSI文件夹下,完全版本包括IDL60、License等文件夹,ENVI的所有文件及文件夹保存在IDL60\products\ENVI40下。 ?Bin:相应的ENVI运行目录。 ?Data:数据目录,保存一矢量文件夹(一些矢量数据)和一些例子数据(有 些数据有头文件,有些数据没有头文件)。 ?Flt_func:ENVI常规传感器的光谱库文件。例如:aster、modis、spot、tm 等。 ?Help:ENVI的帮助文档。 ?Lib:IDL生成的可编译的程序,用于二次开发。 ?Map_proj:影像的投影信息,文本格式,客户可以进行定制。 ?Menu:ENVI菜单文件,可以进行中、英文菜单互换。并不是所有的英文菜单 都已经汉化,汉化工作我们正在做,以后会陆续推出。 ?Save:应用IDL可视化语言编译好的、可执行的ENVI程序。 ?Save_add:客户自主开发的、可执行程序。 ?Spec_lib:波谱库,不同地区可以有不同的波谱库,用户可以自定义。 四、中文菜单和英文菜单的互换 1、文件互换 在RSI\IDL60\products\envi40\menu目录下,display.men、 display_shortcut.men、envi.men三个文件是ENVI的菜单文件,可以将其(中文或英文)菜单文件备份后,将另外(英文或中文)菜单文件考入此目录下
遥感图像实验报告 一.实验目的 1、初步了解目前主流的遥感图象处理软件ERDAS的主要功能模块。 2、掌握Landsat ETM遥感影像数据,数据获取手段.掌握遥感分类的方法, 土地利用变化的分析,植被变化分析,以及利用遥感软件建模的方法。 3、加深对遥感理论知识理解,掌握遥感处理技术平台和方法。 二.实验内容 1、遥感图像的分类 2、土地利用变化分析,植被变化分析 3、遥感空间建模技术 三.实验部分 1.遥感图像的分类 (1)类别定义:根据分类目的、影像数据自身的特征和分类区收集的信息确定分类系统; (2)特征判别:对影像进行特征判断,评价图像质量,决定是否需要进行影像增强等预处理; (3)样本选择:为了建立分类函数,需要对每一类别选取一定数目的样本;(4)分类器选择:根据分类的复杂度、精度需求等确定哪一种分类器; (5)影像分类:利用选择的分类器对影像数据进行分类,有的时候还需要进行分类后处理;分类图如下:
图1.1 1992年土地利用图 图1.2 2001年土地利用图
(6)结果验证:对分类结果进行评价,确定分类的精度和可靠性。 图1.3 1992年精度图 图1.4 2002年精度图 2.土地利用变化 2.1 两年土地利用相重合区域 (1)在两年的遥感影像中选择相同的区域。 Subset(x:568121~684371,y:3427359~3288369),过程如下:
图2.1 截图过程图 图2.2.2 截图过程图
(2)土地利用专题地图如下: 图2.2.3 1992年专题地图 图2.2.4 2001年土地利用图
数学建模中常见的十 大模型
精品文档 数学建模常用的十大算法==转 (2011-07-24 16:13:14) 转载▼ 1. 蒙特卡罗算法。该算法又称随机性模拟算法,是通过计算机仿真来解决问题的算法,同时可以通过模拟来检验自己模型的正确性,几乎是比赛时必用的方法。 2. 数据拟合、参数估计、插值等数据处理算法。比赛中通常会遇到大量的数据需要处理,而处理数据的关键就在于这些算法,通常使用MA TLAB 作为工具。 3. 线性规划、整数规划、多元规划、二次规划等规划类算法。建模竞赛大多数问题属于最优化问题,很多时候这些问题可以用数学规划算法来描述,通常使用Lindo、Lingo 软件求解。 4. 图论算法。这类算法可以分为很多种,包括最短路、网络流、二分图等算法,涉及到图论的问题可以用这些方法解决,需要认真准备。 5. 动态规划、回溯搜索、分治算法、分支定界等计算机算法。这些算法是算法设计中比较常用的方法,竞赛中很多场合会用到。 6. 最优化理论的三大非经典算法:模拟退火算法、神经网络算法、遗传算法。这些问题是用来解决一些较困难的最优化问题的,对于有些问题非常有帮助,但是算法的实现比较困难,需慎重使用。 7. 网格算法和穷举法。两者都是暴力搜索最优点的算法,在很多竞赛题中有应用,当重点讨论模型本身而轻视算法的时候,可以使用这种暴力方案,最好使用一些高级语言作为编程工具。 8. 一些连续数据离散化方法。很多问题都是实际来的,数据可以是连续的,而计算机只能处理离散的数据,因此将其离散化后进行差分代替微分、求和代替积分等思想是非常重要的。 9. 数值分析算法。如果在比赛中采用高级语言进行编程的话,那些数值分析中常用的算法比如方程组求解、矩阵运算、函数积分等算法就需要额外编写库函数进行调用。 10. 图象处理算法。赛题中有一类问题与图形有关,即使问题与图形无关,论文中也会需要图片来说明问题,这些图形如何展示以及如何处理就是需要解决的问题,通常使用MATLAB 进行处理。 以下将结合历年的竞赛题,对这十类算法进行详细地说明。 以下将结合历年的竞赛题,对这十类算法进行详细地说明。 2 十类算法的详细说明 2.1 蒙特卡罗算法 大多数建模赛题中都离不开计算机仿真,随机性模拟是非常常见的算法之一。 举个例子就是97 年的A 题,每个零件都有自己的标定值,也都有自己的容差等级,而求解最优的组合方案将要面对着的是一个极其复杂的公式和108 种容差选取方案,根本不可能去求解析解,那如何去找到最优的方案呢?随机性模拟搜索最优方案就是其中的一种方法,在每个零件可行的区间中按照正态分布随机的选取一个标定值和选取一个容差值作为一种方案,然后通过蒙特卡罗算法仿真出大量的方案,从中选取一个最佳的。另一个例子就是去年的彩票第二问,要求设计一种更好的方案,首先方案的优劣取决于很多复杂的因素,同样不可能刻画出一个模型进行求解,只能靠随机仿真模拟。 2.2 数据拟合、参数估计、插值等算法 数据拟合在很多赛题中有应用,与图形处理有关的问题很多与拟合有关系,一个例子就是98 年美国赛A 题,生物组织切片的三维插值处理,94 年A 题逢山开路,山体海拔高度的 收集于网络,如有侵权请联系管理员删除
高光谱数据处理基本流 程 The document was finally revised on 2021
高光谱分辨率遥感 用很窄(10-2l)而连续的光谱通道对地物持续遥感成像的技术。在可见光到短波红外波段其光谱分辨率高达纳米(nm)数量级,通常具有波段多的特点,光谱通道数多达数十甚至数百个以上,而且各光谱通道间往往是连续的,每个像元均可提取一条连续的光谱曲线,因此高光谱遥感又通常被称为成像光谱(Imaging Spectrometry)遥感。 高光谱遥感具有不同于传统遥感的新特点: (1)波段多——可以为每个像元提供几十、数百甚至上千个波段; (2)光谱范围窄——波段范围一般小于10nm; (3)波段连续——有些传感器可以在350~2500nm的太阳光谱范围内提供几乎连续的地物光谱; (4)数据量大——随着波段数的增加,数据量成指数增加; (5)信息冗余增加——由于相邻波段高度相关,冗余信息也相对增加。 优点: (1)有利于利用光谱特征分析来研究地物; (2)有利于采用各种光谱匹配模型; (3)有利于地物的精细分类与识别。 ENVI高光谱数据处理流程: 一、图像预处理 高光谱图像的预处理主要是辐射校正,辐射校正包括传感器定标和大气纠正。辐射校正一般由数据提供商完成。 二、显示图像波谱 打开高光谱数据,显示真彩色图像,绘制波谱曲线,选择需要的光谱波段进行输出。 三、波谱库 1、标准波谱库 软件自带多种标准波谱库,单击波谱名称可以显示波谱信息。 2、自定义波谱库
ENVI提供自定义波谱库功能,允许基于不同的波谱来源创建波谱库,波谱来源包括收集任意点波谱、ASCII文件、由ASD波谱仪获取的波谱文件、感兴趣区均值、波谱破面和曲线等等。 3、波谱库交互浏览 波谱库浏览器提供很多的交互功能,包括设置波谱曲线的显示样式、添加注记、优化显示曲线等 四、端元波谱提取 端元的物理意义是指图像中具有相对固定光谱的特征地物类型,它实际上代表图像中没有发生混合的“纯点”。 端元波谱的确定有两种方式: (1)使用光谱仪在地面或实验室测量到的“参考端元”,一般从标准波谱库选择; (2)在遥感图像上得到的“图像端元”。 端元波谱获取的基本流程: (1)MNF变换 重要作用为:用于判定图像内在的维数;分离数据中的噪声;减少计算量;弥补了主成分分析在高光谱数据处理中的不足。 (2)计算纯净像元指数PPI PPI生成的结果是一副灰度的影像,DN值越大表明像元越纯。 作用及原理:
《遥感原理与应用》实验指导书 矿业工程学院 测绘科学与技术系
实验一、遥感图像几何校正(2学时)实验二、遥感图像辐射增强(2学时)实验三、遥感图像非监督分类(2学时)
实验一、遥感图像几何校正(2学时)
原理与方法简介遥感影像由于遥感平台位置和运动状态变化、地形起伏、地球表面曲率、大气折射、地球自转等诸多因素的影响而产生与地面目标位置和(或)形状方面的不相一致的几何畸变,通过一定的数学算法,使这种畸变消除或接近消除,这就是几何校正。常用的几何校正计算方法主要有以下三种: 1)邻域法(Nearest neighbor )——将最接近的像元值赋予输出像元(图1.1); Figure1.1Nearest Neighbor 邻域法优点:极值和一些细节不会丢失,对植被分类、查找具线性特征的边界或侦测湖水的混浊度和温度是重要的。该方法适用于分类之前,计算速度快,适合于具有定性和定量特点的专题图像研究。 其缺点是:从较大的栅格重采样到较小栅格时会出现阶梯状斜线;可能会丢失或重复一些数值;用于线形专题图(如道路、水系)可能引起线状网络数据断开或出现裂隙。 2)双线性内插法(bilinear interpolation )——利用二次样条函数计算2×2窗口中的4个像元值并赋予输出像元(图1.2)。 Figure1.2Bilinear Interpolation 113V dy D V V V m +?-= 224V dy V V Vn +?-=
m m n V dx D V V Vr +?-=或:i i i i i i i r V D y D x D V W V ??-?-==∑∑==41241))((W i ——权重因子 Δx i ,Δy i ——r 点与i 点的坐标变化 V i ——i 像元值 双线性内插法的优点是:图像较平滑,不会出现阶梯现象,空间精度较高,常用于需要改变像元大小的场合,如SPOT/TM 的融合。 其缺点是:由于像元作过平均计算,相当于低通滤波(Low-frequency convolution )的效果,边界平滑,某些极值会丢失。 3)立方卷积内插法(Cubic convolution )——利用三次函数计算4×4窗口中的像素值并赋予输出像素(图1.3) 。 Figure 1.3Cubic Convolution 类似于双线性内插,只是所用窗口为4*4,而非2*2,即对16个像元作平均运算而得出输出像元的数据文件值。 ]} 2)2,2([*)2,2(]1)2,1([*)2,1()]2,([*)2,(]1)2,1([*)2,1({4 1--++-+++ --++-+++ -+-++ +-+--+-=∑=n j i d f n j i V n j i d f n j i V n j i d f n j i V n j i d f n j i V V i r 其中:i=int(x r ),j=int(y r ) d(i ,j)——(i ,j)和(x r ,y r )坐标距离 V(i ,j)——(i ,j)像元值 V r ——输出像元数据文件值
数学建模方法详解--三种最常用算法 一、层次分析法 层次分析法[1] (analytic hierarchy process,AHP)是美国著名的运筹学家T.L.Saaty教授于20世纪70年代初首先提出的一种定性与定量分析相结合的多准则决策方法[2,3,4].该方法是社会、经济系统决策的有效工具,目前在工程计划、资源分配、方案 排序、政策制定、冲突问题、性能评价等方面都有广泛的应用. (一) 层次分析法的基本原理 层次分析法的核心问题是排序,包括递阶层次结构原理、测度原理和排序原理[5].下面分别予以介绍. 1.递阶层次结构原理 一个复杂的结构问题可以分解为它的组成部分或因素,即目标、准则、方案等.每一个因素称为元素.按照属性的不同把这 些元素分组形成互不相交的层次,上一层的元素对相邻的下一层的全部或部分元素起支配作用,形成按层次自上而下的逐层支配 关系.具有这种性质的层次称为递阶层次. 2.测度原理 决策就是要从一组已知的方案中选择理想方案,而理想方案一般是在一定的准则下通过使效用函数极大化而产生的.然而对 于社会、经济系统的决策模型来说,常常难以定量测度.因此,层次分析法的核心是决策模型中各因素的测度化.3.排序原理
层次分析法的排序问题,实质上是一组元素两两比较其重要性,计算元素相对重要性的测度问题.(二) 层次分析法的基本步骤 层次分析法的基本思路与人对一个复杂的决策问题的思维、判断过程大体上是一致的[1] . 1.成对比较矩阵和权向量 为了能够尽可能地减少性质不同的诸因素相互比较的困难,提高结果的准确度.T .L .Saaty 等人的作法,一是不把所有因 素放在一起比较,而是两两相互对比,二是对比时采用相对尺度. 假设要比较某一层n 个因素n C C ,,1对上层一个因素O 的影响,每次取两个因素i C 和j C ,用ij a 表示i C 和j C 对O 的影响之比, 全部比较 结 果 可 用 成 对 比 较 阵 1 ,0,ij ij ji n n ij A a a a a 表示,A 称为正互反矩阵.一般地,如果一个正互反阵 A 满足: , ij jk ik a a a ,,1,2,,i j k n (1) 则A 称为一致性矩阵,简称一致阵.容易证明n 阶一致阵A 有下列性质: ①A 的秩为1,A 的唯一非零特征根为n ;②A 的任一列向量都是对应于特征根 n 的特征向量. 如果得到的成对比较阵是一致阵,自然应取对应于特征根n 的、归一化的特征向量(即分量之和为1)表示诸因素n C C ,, 1对 上层因素O 的权重,这个向量称为权向量.如果成对比较阵A 不是一致阵,但在不一致的容许范围内,用对应于A 最大特征根(记
实验报告 课程名称:系部名称:测绘工程学院专业班级:遥感科学与技术11-1班学生姓名:学号:指导教师:田静 实验报告1 实验报告2 篇二:envi上机报告 《遥感软件应用与开发》 实验指导书、作业 系部名称:测绘工程学院 专业班级:遥感科学与技术11-1班 学生姓名: 学号: 指导教师:田静 测绘工程学院 目录 《遥感软件应用与开发》课程实验指导书错误!未定义书签。 实验一:envi软件安装与基本功能操作3 实验二:影像的地理坐标定位和校正19 实验三:图像融合、图像镶嵌、图像裁剪 25 实验四:图像分类 31 实验报告: 37 实验报告1: 38 实验报告2: 41 实验报告3: 44 实验报告4: 47 实验一:envi软件安装与基本功能操作 一、实验目的 熟悉遥感数据图像处理软件envi的安装过程,了解envi基本信息、基本概念及其主要特性。对envi操作界面有一个基本的熟悉,对各菜单功能有一个初步了解,为后面的实验作好准备。 二、实验学时 2学时 三、实验类型 实践 四、实验原理及内容 (1)遥感图像处理软件envi界面总体介绍 (2)envi软件能识别的图像类型介绍 (3)各种图像文件的打开 重点: envi能识别的文件类型 学生可自行阅读帮助文件学习。 五、实验步骤 1.envi的安装 2.遥感图像处理软件envi界面介绍 启动envi后,出现主菜单条,一共12项 file:文件操作。支持众多的卫星和航空传感器。支持80多种图像以及矢 量数据格式的输入,支持多种格式图像文件的直接输入。可输 出的格式包括:栅格格式和矢量格式。 basic tools:基本图像工具。提供了多种envi功能的入口。这些功能对于