欧阳家百创编
l 摆杆转动轴心到
0.1225 m
杆质心的长度
I 摆杆惯量0.0034 kg*m*m
g 重力加速度9.8 kg.m/s
(2)直线一级倒立摆根轨迹校正控制原理
基于根轨迹法校正的基本思想是:假设系统的动态性能指标可由靠近虚轴的一对共轭闭环主导极点来表征,因此,可把对系统提出的时域性能指标的要求转化为一对期望闭环主导极点。确定这对闭环主导极点的位置后,首先根据绘制根轨迹的相角条件判断一下它们是否位于校正前系统的根轨迹上。如果这对闭环主导极点正好落在校正前系统的根轨迹上,则无需校正,只需调整系统的根轨迹增益即可;否则,可在系统中串联一个超前校正装置。
常见的校正器有超前校正、滞后校正以及超前滞后校正等。
2. 实验方法
(1)直线倒立摆建模、仿真与分析
利用牛顿-欧拉方法建立直线一级倒立摆系统的数学模型;依照根轨迹设计的步骤得到系统的控制器,利用MA TLAB Simulink中的工具进行仿真分析。
(3)直线一级倒立摆根轨迹校正控制
利用MATLAB Simulink来实现根轨迹校正控制参数设定和仿真,并利用该参数来设定只限一级倒立摆的根轨迹校正控制器值,分析和仿真倒立摆的运行情况。
3. 实验装置
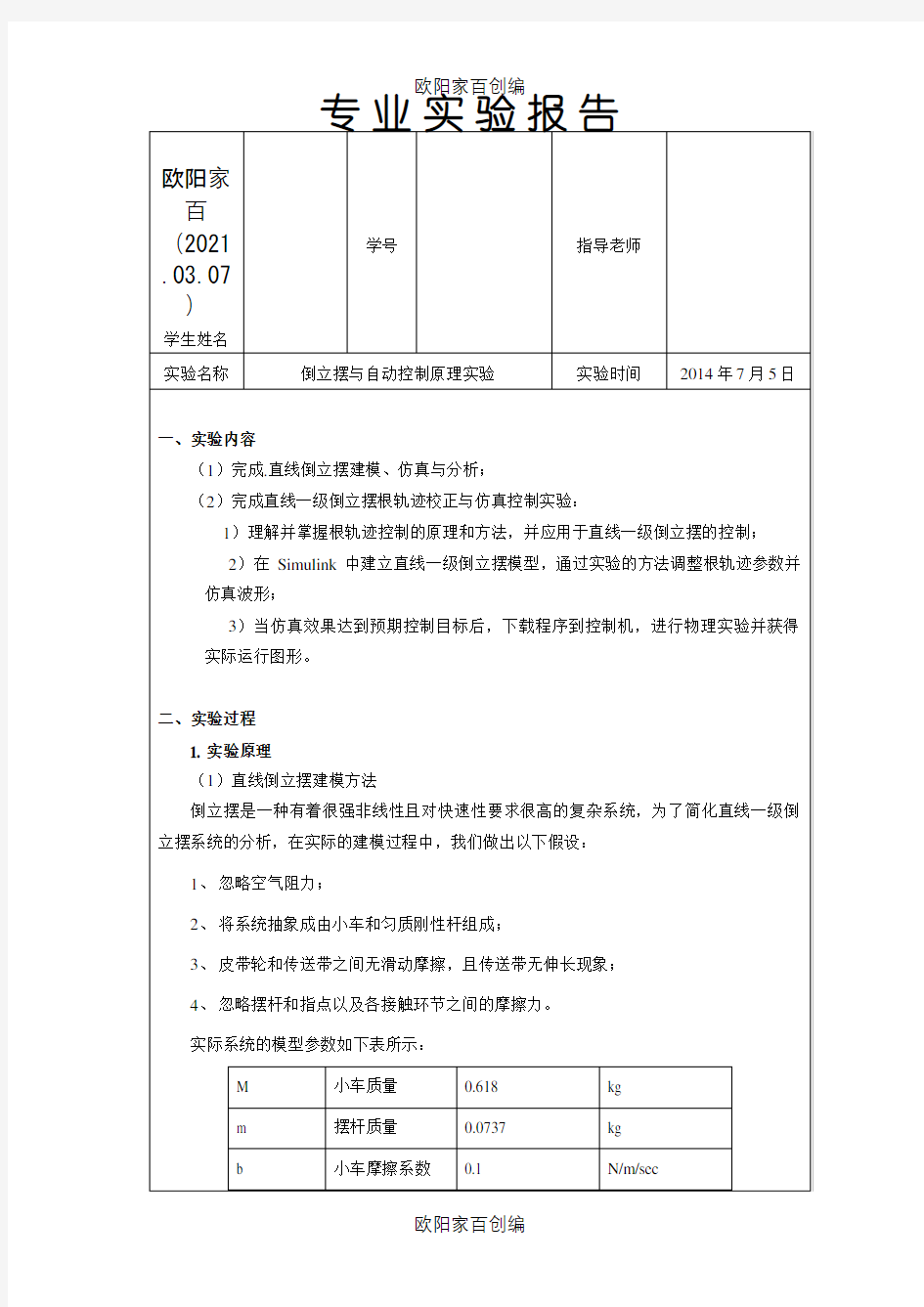
直线单级倒立摆控制系统硬件结构框图如图1所示,包括计算机、I/O设备、伺服系统、倒立摆本体和光电码盘反馈测量元件等几大部分,组成了一个闭环系统。
图1 一级倒立摆实验硬件结构图
对于倒立摆本体而言,可以根据光电码盘的反馈通过换算获得小车的位移,小车的速
度信号可以通过差分法得到。摆杆的角度由光电码盘检测并直接反馈到I/O 设备,速度信号可以通过差分法得到。计算机从I/O 设备中实时读取数据,确定控制策略(实际上是电机的输出力矩),并发送给I/O 设备,I/O 设备产生相应的控制量,交与伺服驱动器处理,然后使电机转动,带动小车运动,保持摆杆平衡。
图2是一个典型的倒立摆装置。铝制小车由6V 的直流电机通过齿轮和齿条机构来驱动。小车可以沿不锈钢导轨做往复运动。小车位移通过一个额外的与电机齿轮啮合的齿轮测得。小车上面通过轴关节安装一个摆杆,摆杆可以绕轴做旋转运动。系统的参数可以改变以使用户能够研究运动特性变化的影响,同时结合系统详尽的参数说明和建模过程,我们能够方便地设计自己的控制系统。
图2 一级倒立摆实验装置图
上面的倒立摆控制实验仪器,包括:摆杆机构、滑块导轨机构基座,其特征在于:其蜗杆通过轴承固定于基座上,与之啮合的涡轮扇的轴通过轴承固定于动座下边,大皮带轮轴一端联接电机,另一端电位计由支座固定于动座上并电机共轴,大皮带轮与2个小皮带轮通过皮带连结,并通过轴承固定于动座之上;滑块固定联接于皮带轮之间的皮带上,同时滑块与动座固定的导轨动配合;摆杆机构通过下摆支座与滑块绞接;控制箱连电位计,电机。
4. 实验内容及步骤
1)设计根轨迹校正控制器。 (1)确定闭环期望极点
d
S 的位置,由最大超调量
2(1)10%
p M e
ζ
ζπ
--=≤,
可以得到0.5912ζ≥,取0.6ζ=, 由cos ζθ=得0.9273θ=rad ,
其中θ为位于第二象限的极点和原点的连线与实轴负方向的夹角。
图3 性能指标与根轨迹关系图
又由
4
0.5
s
n
t s
ζω
=≤
可以得到13.3333
n
ω≥,取13.5
n
ω=,于是可以得到期望的闭环极点为
13.5(cos sin)8.110.8
j j
θθ
-±≈-±*。
(2)未校正系统的根轨迹在实轴和虚轴上,不通过闭环期望极点,因此需要对系统进行超前校正,设控制器为
1
()(1)
1
c
c
c
s z
aTs
G s a
Ts s p
+
+
==>
++
。
(3)计算超前校正装置应提供的相角,已知系统原来的极点在主导极点产生的滞后相角和为
11
13.5sin13.5sin
()tan tan
13.5cos7.74613.5cos7.746
2.1362
d
G s
θθ
θθ
--
??
????
=-+
? ?
?
-+
????
??
≈,
所以一次校正装置提供的相角为
3.1416 2.1362 1.0054
φ=-=
。
(4)设计超前校正装置,已知0.9273
θ=,对于最大的a值的γ角度
1
()0.6045
2
γπθφ
=--=
。
图4 根轨迹校正计算图
按最佳确定法作图规则,在上图中画出相应的直线,求出超前校正装置的零点和极点,分别为
7,24
c p
z z
=-=-
,
校正后系统的开环传递函数为
2
(7) 6.122
()()
2460.06
c
K s
Q KG s G s
s s
+
==
+-。
(5)由幅值条件()1
d Q s =,反馈为单位反馈,所以可得52.71k =。 (6)于是我们得到了系统的控制器
52.71(7)()24s G s s +=
+
(2)直线倒立摆建模、仿真与分析
1)应用经典力学的理论,结合实验手册建立直线一级倒立摆系统的抽象数学模型; (3)直线一级倒立摆PID 控制实验 1)PID 控制参数设定及仿真
在Simulink 中建立如图5所示的直线一级倒立摆模型。
图5 基于根轨迹校正控制的直线一级倒立摆Simulink 仿真模型
点击“Simulation ”菜单,在下拉菜单中选择“Simulation Parameters ”,在下面窗口中设置“Simulation time ”以及“Solver options ”等选项。设置仿真步长为0.01秒。
图6 Simulation Parameters 界面
点击运行仿真,双击“Scope ”模块观察仿真结果:
图7 直线一级倒立摆的根轨迹校正仿真结果(一阶控制器)
可以看出,系统能较好的跟踪阶跃信号,但是存在一定的稳态误差,修改控制器的零点和极点,可以得到不同的控制效果,多次改变参数后,选取仿真结果最好的参数进行根轨迹校正控制物理实验。
2)根轨迹校正控制实验
双击快捷方式“元创兴便携式倒立摆实物控制”,在左侧的SelectExperiment模块中选择实验编号2,然后单击右侧对应的Enabled Subsystem模块后出现以下界面。
图8 根轨迹校正实验模块组成
把仿真得到的参数输入根轨迹校正控制器,点击“OK”保存参数;
点击编译程序,完成后点击使计算机和倒立摆建立连接;
点击运行程序,缓慢提起倒立摆的摆杆到竖直向上的位置,在程序进入自动控制后松开,当小车运动到正负限位的位置时,用工具挡一下摆杆,使小车反向运动。
5、实验延伸拓展
在学习本次根轨迹校正控制实验的同时,我查阅了更多的资料,并尝试运用matlab自带的工具箱来获得更加稳定的根轨迹校正控制器的值。
1: --------------------------------------
s^4 + 0.1485 s^3 - 20.16 s^2 - 2.915 s
2.974 s - 5.151e-18
2: ----------------------------------
s^3 + 0.1485 s^2 - 20.16 s - 2.915
Continuous-time transfer function.
3、零极点增益表达式
Gs =
2.9745 s
------------------------------
(s-4.488) (s+4.492) (s+0.1446)
Continuous-time zero/pole/gain model.
(2)SISO TOOL进行根轨迹分析
>> SISOTOOL(Gs)
打开SISO Design TOOL得到系统开环传递函数的根轨迹图,并调节Control and Estimation Tools Manager|Control Architecture 窗口,使得控制器C在反馈通道
图9 Control Architecture 窗口
打开Edit|SISO Tool Preferences|Options|选择Zero/pole/gain,没有添加控制器的开环传递函数根轨迹如图所示,
图10 开环传递函数根轨迹
然后在Matlab Command Window中再输入:
>>pole(Gs)
ans =
4.4884
-4.4923
-0.1446
可以看到传递函数的极点分布为:两个左半平面的极点和一个右半平面的极点,以及一个在原点的零点,构成了非最小相位系统,显然,系统是不稳定,由于传递函数有一个极点位于右半平面.
(3)通过添加超前滞后校正得到相对稳定的系统
依次添加的零点-5与极点-100构成超前校正器,添加的零点-1与极点0构成滞后校正,最后拖动系统闭环主导极点,使其向左半平面移动,从而调节增益k,并同时观察阶跃响应曲线和Nyquist曲线,使得系统稳定,并同时达到设计指标。
所添加的零点-1与极点0构成滞后校正,滞后校正网络实质上是一个低通滤波器,对低频信号有较高的增益,从而减小了系统的稳态误差,同时由于滞后校正在高频段的衰减作用,使增益剪切频率移到较低的频率上,保证了系统的稳定性。从而有助于改善系统的稳态性能,并且能够保持理想的瞬态性能。
所添加的零点-5与极点-100构成超前校正器,能够产生如下影响:
(1)渐近线向左移动,有利于改善系统的瞬态性能;
(2)改变根轨迹的分布图,使超前校正装置的零极点分布合理,并有助于改善系统的瞬态特性。
图11 阶跃响应曲线和Nyquist曲线
图12 根轨迹在原点处局部放大的根轨迹
绘制阶跃响应曲线和Nyquist曲线
图13阶跃响应曲线和Nyquist曲线
可以看出摆杆角度最终小于0.04rad,稳定时间在3.0-3.5s之间。按照操作步骤6的方法导出此时控制器的传递函数.
(4)导出控制器的传递函数
Cs =
484.98 (s+1) (s+5)
------------------
s (s+100)
Cs=tf(Cs)
Cs =
485 s^2 + 2910 s + 2425
-----------------------
s^2 + 100 s
对此时的控制器传递函数进行离散化如下,
c2d(Cs,0.005)
ans =
485 z^2 - 958.5 z + 473.6
-------------------------
z^2 - 1.607 z + 0.6065
(5) Simulink仿真
1、基于线性模型的Simulink仿真
分别从信号源库(Sources)、数学运算库(Math Operations)、连续系统库(Continuous)、常用模块(Commonly Used Blocks)、输出方式库(Sinks)中将阶跃信号发生器(Step)、相加器(Sum)、状态空间模型(State-Space)、传递函数(Transfer Fcn)、分线器(Demux) 、示波器(Scope)选中,并将其拖至模型窗口。按要求将各个模块如图连接好。四个示波器分别显示小车位置,小车速度,摆杆摆角,摆杆角速度。
图14 根轨迹校正的simulink仿真图
运行后,双击Scope和Scope2得到小车位置和摆杆角度的单位阶跃响应的曲线:
图15 小车位置图16摆杆角度由图可知,摆杆能够稳定,但是小车的位置不能够控制。由于直线一级倒立摆是单输入单输出模型,在设计时只把摆杆角度作为控制目标,而没有涉及小车的位置,小车位移在阶跃输入下信号线性增加,所以小车在单方向运动,不能稳定在某个位置,最终会触发限位开关。
2、基于非线性模型的Simulink仿真
控制器采用线性方程仿真所设计的摆杆角度控制器,在课后习题有涉及计算环节,不再详述。
图17 基于非线性模型的Simulink仿真
图18 小车位置图19 摆杆角度
三、结果
1. 完成直线倒立摆建模、仿真与分析
运行后,倒立摆经过手动起摆,到达平衡位置后稳定;如果给以一定范围内的干扰,倒立摆能较快地重新恢复平衡状态。需要注意的是,尽量让小车处于轨道中间位置附近。
2. 完成直线一级倒立摆根轨迹校正控制实验
(1)倒立摆平衡实验结果如下图所示:
图20 直线一级倒立摆根轨迹校正控制实验结果
从图中可以看出,倒立摆可以实现较好的稳定性。
(2)扰动实验
在系统处于稳态时,考察系统的抗扰动能力。在给定干扰的情况下,小车位置和摆杆角度的变化曲线如下图所示:
图21 直线一级倒立摆根轨迹控制实验结果2(施加干扰)可以看出,系统可以较好的抵换外界干扰,在干扰停止作用后,系统能很快回到平衡位置。
(3)实验结果分析
从图21所示的变化曲线可知,当小车位置受到外界干扰而变化时,系统控制程序总能使其在一定时间内,逐渐回到一个固定角度范围内;如果不受到干扰,将一直保持在这个角度范围内,最后趋于定值,保持稳定。
电力电子电路分析与仿真 实验报告 学院:哈尔滨理工大学荣成学院 专业: 班级: 姓名: 学号: 年月日
实验1降压变换器 一、实验目的: 设计一个降压变换器,输入电压为220V,输出电压为50V,纹波电压为输出电压的0.2%,负载电阻为20欧,工作频率分别为220kHz。 二、实验内容: 1、设计参数。 2、建立仿真模型。 3、仿真结果与分析。 三、实验用设备仪器及材料: MATLAB仿真软件 四、实验原理图: 五、实验方法及步骤: 1.建立一个仿真模型的新文件。在MATLAB的菜单栏上点击File,选择New,再在弹出菜单中选择Model,这时出现一个空白的仿真平台,在这个平台上可以绘制电路的仿真模型。 2.提取电路元器件模块。在仿真模型窗口的菜单上点击Simulink调出模型库浏览器,在模型库中提取所需的模块放到仿真窗口。
3.仿真模型如图所示。 六、参数设置 七、仿真结果分析
实验2升压变换器 一、实验目的: 将一个输入电压在3~6V的不稳定电源升压到稳定的15V,纹波电压低于0.2%,负载电阻10欧,开关管选择MOSFET,开关频率为40kHz,要求电感电流连续。 二、实验内容: 1、设计参数。 2、建立仿真模型。 3、仿真结果与分析。 三、实验用设备仪器及材料: MATLAB仿真软件 五、实验原理图: 五、实验方法及步骤: 1.建立一个仿真模型的新文件。在MATLAB的菜单栏上点击File,选择New,再在弹出菜单中选择Model,这时出现一个空白的仿真平台,在这个平台上可以绘制电路的仿真模型。 2.提取电路元器件模块。在仿真模型窗口的菜单上点击Simulink调出模型库浏览器,在模型库中提取所需的模块放到仿真窗口。
实验三 根轨迹分析 一、实验目的: 1.熟悉零、极点对根轨迹的影响 2.组合典型环节按照题目完成相应曲线 二、实验内容 鱼鹰型倾斜旋翼飞机V-22既是一种普通飞机,又是一种直升机。当飞机起飞和着陆时,其发动机位置可以使V-22像直升机那样垂直起降,而在起飞后,它又可以将发动机旋转90度,切换到水平位置,像普通飞机一样飞行。在直升机模式下,飞机的高度控制系统如图所示。要求: (1) 概略绘出当控制器增益K1变化时的系统根轨迹图,确定使系统稳定的K1值范围; (2) 当取K1=280时,求系统对单位阶跃输入r(t)=l(t)的实际输出h(t),并确定系统的 超调量和调节时间(Δ=2%); (3) 当K1=280,r(t)=0时,求系统对单位阶跃扰动N (s )=1/s 的输出h n (t); (4) 若在R (s )和第一个比较点之间增加一个前置滤波器 G p (s)= 5 .05.15 .02 ++s s Matlab 指令如下 fenzi=[1 1.5 0.5]; fenmu=[1 0]; G1=tf(fenzi,fenmu) fenzi=[1]; fenmu=conv(conv([20 1],[10 1]),[0.5 1]); G2=tf(fenzi,fenmu) sys1=series(G1,G2) rlocus(sys1) sys2=feedback(280*sys1,1) step(sys2) sys3=feedback(G2,280*G1) step(sys3) G3=tf([0.5],[1 1.5 0.5]) sys4=series(G3,sys2) step(sys4)
倒立摆控制系统控制器设计实验报告
成员:陈乾睿 2220150423 郑文 2220150493 学院:自动化 倒立摆控制系统控制器设计实验 一、实验目的和要求 1、目的 (1)通过本设计实验,加强对经典控制方法(LQR控制器、PID控制器)和智能控制方法(神经网络、模糊控制、遗传算法等)在实际控制系统中的应用研究。(2)提高学生有关控制系统控制器的程序设计、仿真和实际运行能力. (3)熟悉MATLAB语言以及在控制系统设计中的应用。 2、要求 (1)完成倒立摆控制系统的开环系统仿真、控制器的设计与仿真以及实际运行结果 (2)认真理解设计内容,独立完成实验报告,实验报告要求:设计题目,设计的具体内容及实验运行结果,实验结果分析、个人收获和不足,参考资料。程序
清单文件。 二、实验内容 倒立摆控制系统是一个典型的非线性系统,其执行机构具有很多非线性,包括:死区、电机和带轮的传动非线性等。 本设计实验的主要内容是设计一个稳定的控制系统,其核心是设计控制器,并在MATLAB/SIMULINK环境下进行仿真实验,并在倒立摆控制实验平台上实际验证。 算法要求:使用LQR以外的其它控制算法。 三、倒立摆系统介绍 倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究。倒立摆系统作为控制理论研究中的一种比较理想的实验手段,为自动控制理论的教学、实验和科研构建一个良好的实验平台,以用来检验某种控制理论或方法的典型方案,促进了控制系统新理论、新思想的发展。由于控制理论的广泛应用,由此系统研究产生的方法和技术将在半导体及精密仪器加工、机器人控制技术、人工智能、导弹拦截控制系统、航空对接控制技术、火箭发射中的垂直度控制、卫星飞行中的姿态控制和一般工业应用等方面具有广阔的应用开发前景。 倒立摆的形式和结构各异,但所有的倒立摆都具有以下的特性:非线性,不确定性,耦合性,开环不稳定性,约束限制。 经过相关论文和文献的查询,我们决定采用模糊控制的方法进行倒立摆的控制。
实用文档 研究生课程实验报告 课程名称:线性系统 实验名称:平面二级倒立摆实验 班级: 12S0441 学号:12S104057 姓名:白俊林 实验时间: 2012 年12 月 21 日 控制科学与工程教学实验中心
1.实验目的 1)熟悉Matlab/Simulink仿真; 2)掌握LQR控制器设计和调节; 3)理解控制理论在实际中的应用。 倒立摆研究的意义是,作为一个实验装置,它形象直观,简单,而且参数和形状易于改变;但它又是一个高阶次、多变量、非线性、强耦合、不确定的绝对不稳定系统的被控系统,必须采用十分有效的控制手段才能使之稳定。因此,许多新的控制理论,都通过倒立摆试验对理论加以实物验证,然后在应用到实际工程中去。因此,倒立摆成为控制理论中经久不衰的研究课题,是验证各种控制算法的一个优秀平台,故通过设计倒立摆的控制器,可以对控制学科中的控制理论有一个学习和实践机会。 2.实验内容 1)建立直线二级倒立摆数学模型 对直线二级倒立摆进行数学建模,并将非线性数学模型在一定条件下化简成线性数学模型。对于倒立摆系统,由于其本身是自不稳定的系统,实验建立模型存在一定的困难,但是经过小心的假设忽略掉一些次要的因素后,倒立摆系统就是一个典型的运动的刚体系统,可以在惯性坐标系内应用经典力学理论建立系统的动力学方程。对于直线二级倒立摆,由于其复杂程度,在这里利用拉格朗日方程推导运动学方程。 由于模型的动力学方程中存在三角函数,因此方程是非线性的,通过小角度线性化处理,将动力学非线性方程变成线性方程,便于后续的工作的进行。 2)系统的MATLAB仿真 依据建立的数学模型,通过MATLAB仿真得出系统的开环特性,采取相应的控制策略,设计控制器,再加入到系统的闭环中,验证控制器的作用,并进一步调试。控制系统设计过程中需要分析内容主要包括得出原未加控制器时系统的极点分布,系统的能观
实验三 线性系统的根轨迹 一、实验目的 1. 熟悉MATLAB 用于控制系统中的一些基本编程语句和格式。 2. 利用MATLAB 语句绘制系统的根轨迹。 3. 掌握用根轨迹分析系统性能的图解方法。 4. 掌握系统参数变化对特征根位置的影响。 二、实验报告 1.根据内容要求,写出调试好的MATLAB 语言程序,及对应的结果。 2. 记录显示的根轨迹图形,根据实验结果分析根轨迹的绘制规则。 3. 根据实验结果分析闭环系统的性能,观察根轨迹上一些特殊点对应的K 值,确定闭环系统稳定的范围。 4.写出实验的心得与体会。 三、实验内容 请绘制下面系统的根轨迹曲线同时得出在单位阶跃负反馈下使得闭环系统稳定的K 值的范围。 一、 ) 136)(22()(2 2 ++++=s s s s s K s G 1、程序代码: G=tf([1],[1,8,27,38,26]); rlocus (G); [k,r]=rlocfind(G) G_c=feedback(G,1); step(G_c) 2、实验结果:
-8-6 -4 -2 24 6 8 Root Locus Real Axis I m a g i n a r y A x i s selected_point = -8.8815 + 9.4658i k = 1.8560e+04 r = -10.2089 + 8.3108i -10.2089 - 8.3108i 6.2089 + 8.2888i 6.2089 - 8.2888i Time (seconds) A m p l i t u d e selected_point = -9.5640 - 7.6273i k = 1.3262e+04 r = -9.5400 + 7.6518i -9.5400 - 7.6518i 5.5400 + 7.6258i 5.5400 - 7.6258i Time (seconds) A m p l i t u d e
倒立摆实验报告 机自82 组员:李宗泽 李航 刘凯 付荣
倒立摆与自动控制原理实验 一.实验目的: 1.运用经典控制理论控制直线一级倒立摆,包括实际系统模型的建立、根轨迹分析和控制器设计、频率响应分析、PID 控制分析等内容. 2.运用现代控制理论中的线性最优控制LQR 方法实验控制倒立摆 3.学习运用模糊控制理论控制倒立摆系统 4.学习MATLAB工具软件在控制工程中的应用 5.掌握对实际系统进行建模的方法,熟悉利用MATLAB 对系统模型进行仿真,利用学习的控制理论对系统进行控制器的设计,并对系统进行实际控制实验,对实验结果进行观察和分析,非常直观的感受控制器的控制作用。 二. 实验设备 计算机及等相关软件 固高倒立摆系统的软件 固高一级直线倒立摆系统,包括运动卡和倒立摆实物 倒立摆相关安装工具 三.倒立摆系统介绍 倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种
技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究。倒立摆系统作为控制理论研究中的一种比较理想的实验手段,为自动控制理论的教学、实验和科研构建一个良好的实验平台,以用来检验某种控制理论或方法的典型方案,促进了控制系统新理论、新思想的发展。由于控制理论的广泛应用,由此系统研究产生的方法和技术将在半导体及精密仪器加工、机器人控制技术、人工智能、导弹拦截控制系统、航空对接控制技术、火箭发射中的垂直度控制、卫星飞行中的姿态控制和一般工业应用等方面具有广阔的利用开发前景。 倒立摆已经由原来的直线一级倒立摆扩展出很多种类,典型的有直线倒立摆环形倒立摆,平面倒立摆和复合倒立摆等,本次实验采用的是直线一级倒立摆。 倒立摆的形式和结构各异,但所有的倒立摆都具有以下的特性: 1) 非线性2) 不确定性3) 耦合性4) 开环不稳定性5) 约束限制 倒立摆控制器的设计是倒立摆系统的核心内容,因为倒立摆是一个绝对不稳定的系统,为使其保持稳定并且可以承受一定的干扰,需要给系统设计控制器,本小组采用的控制方法有:PID 控制、双PID 控制、LQR控制、模糊PID控制、纯模糊控制 四.直线一级倒立摆的物理模型: 系统建模可以分为两种:机理建模和实验建模。实验建模就是通过在研究对象上加上一系列的研究者事先确定的输入信号,激励
目录 一、倒立摆系统介绍 (2) 1.1倒立摆系统简介 (2) 1.2 倒立摆组成及其原理 (2) 1.3 倒立摆特性 (3) 二、一级倒立摆 (3) 2.1一级倒立摆建模 (3) 2.2 一级倒立摆控制方法 (11) 2.2.1 单输入—单输出控制方法 (11) 超前滞后控制方法 2.2.2 单输入—多输出控制方法 (22) 双PID控制方法 2.2.3 多输入—多输出控制方法 (30) 极点配置法 二次线性最优控制法 三、二级倒立摆 (36) 3.1二级倒立摆建模 (36) 3.2 二级倒立摆控制方法 (46) 3.2.1 二次线性最优控制法 (46) 3.2.2 基于融合技术的模糊控制法 (48) 四、总结 (60) 五、参考文献 (63)
一、倒立摆系统介绍 1.1倒立摆系统简介 倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究。最初研究开始于二十世纪50 年代,麻省理工学院(MIT)的控制论专家根据火箭发射助推器原理设计出一级倒立摆实验设备。近年来,新的控制方法不断出现,人们试图通过倒立摆这样一个典型的控制对象,检验新的控制方法是否有较强的处理多变量、非线性和绝对不稳定系统的能力,从而从中找出最优秀的控制方法。倒立摆系统作为控制理论研究中的一种比较理想的实验手段,为自动控制理论的教学、实验和科研构建一个良好的实验平台,以用来检验某种控制理论或方法的典型方案,促进了控制系统新理论、新思想的发展。由于控制理论的广泛应用,由此系统研究产生的方法和技术将在半导体及精密仪器加工、机器人控制技术、人工智能、导弹拦截控制系统、航空对接控制技术、火箭发射中的垂直度控制、卫星飞行中的姿态控制和一般工业应用等方面具有广阔的利用开发前景。平面倒立摆可以比较真实模拟火箭的飞行控制和步行机器人的稳定控制等方面的研究。 1.2倒立摆组成及其原理 倒立摆的组成包括计算机、运动控制卡、伺服系统、倒立摆本体和光电码盘、反馈测量元件等几大部分,组成一个闭环系统。对于直线型倒立摆,可以根据伺服电机自带的码盘反馈通过换算获得小车的位移,小车的速度信号可以通过差分法得到;各个摆杆的角度由光电码盘测得并直接反馈到控制卡,速度信号可以通过差分方法得到。计算机从运动控制卡中实时读取数据,确定控制策略(电机的输出力矩),并发送给运动控制卡。运动控制卡经过DSP 内部的控制算法实现该控制决策,产生相应的控制量,使电机转动,带动小车运动,保持摆杆平衡。
研究生课程实验报告 课程名称:线性系统 实验名称:平面二级倒立摆实验 班级:12S0441 学号:12S104057 姓名:白俊林 实验时间:2012 年12 月21 日
控制科学与工程教学实验中心
1.实验目的 1)熟悉Matlab/Simulink仿真; 2)掌握LQR控制器设计和调节; 3)理解控制理论在实际中的应用。 倒立摆研究的意义是,作为一个实验装置,它形象直观,简单,而且参数和形状易于改变;但它又是一个高阶次、多变量、非线性、强耦合、不确定的绝对不稳定系统的被控系统,必须采用十分有效的控制手段才能使之稳定。因此,许多新的控制理论,都通过倒立摆试验对理论加以实物验证,然后在应用到实际工程中去。因此,倒立摆成为控制理论中经久不衰的研究课题,是验证各种控制算法的一个优秀平台,故通过设计倒立摆的控制器,可以对控制学科中的控制理论有一个学习和实践机会。 2.实验内容 1)建立直线二级倒立摆数学模型 对直线二级倒立摆进行数学建模,并将非线性数学模型在一定条件下化简成线性数学模型。对于倒立摆系统,由于其本身是自不稳定的系统,实验建立模型存在一定的困难,但是经过小心的假设忽略掉一些次要的因素后,倒立摆系统就是一个典型的运动的刚体系统,可以在惯性坐标系内应用经典力学理论建立系统的
动力学方程。对于直线二级倒立摆,由于其复杂程度,在这里利用拉格朗日方程推导运动学方程。 由于模型的动力学方程中存在三角函数,因此方程是非线性的,通过小角度线性化处理,将动力学非线性方程变成线性方程,便于后续的工作的进行。 2)系统的MATLAB仿真 依据建立的数学模型,通过MATLAB仿真得出系统的开环特性,采取相应的控制策略,设计控制器,再加入到系统的闭环中,验证控制器的作用,并进一步调试。控制系统设计过程中需要分析内容主要包括得出原未加控制器时系统的极点分布,系统的能观性,能控性。 3)LQR控制器设计与调节实验 利用线性二次型最优(LQR)调节器MATLAB仿真设计的参数结果对平面二阶倒立摆进行实际控制实验,参数微调得到较好的控制效果,记录实验曲线。 4)改变控制对象的模型参数实验 调整摆杆位置,将摆杆1朝下,摆杆2朝上修改模型参数、起摆条件和控制参数,重复3的内容。 3.实验步骤
土木工程与力学学院交通运输工程系 实 验 报 告 课程名称:交通仿真实验 实验名称:基于VISSIM的城市交通仿真实验 专业:交通工程 班级: 1002班 学号: U201014990 姓名:李波 指导教师:刘有军 实验时间: 2013.09 ---- 2013.10
实验报告目录 实验报告一: 无控交叉口冲突区设置与运行效益仿真分析 实验报告二: 控制方式对十字交叉口运行效益影响的仿真分析实验报告三: 信号交叉口全方式交通建模与仿真分析 实验报告四: 信号协调控制对城市干道交通运行效益的比较分析实验报告五: 公交站点设置对交叉口运行效益的影响的仿真分析实验报告六: 城市互通式立交交通建模与仿真分析 实验报告七: 基于VISSIM的城市环形交叉口信号控制研究 实验报告成绩
实验报告一: 无控交叉口冲突区设置与运行效益仿真分析 一、实验目的 熟悉交通仿真系统VISSIM软件的基本操作,掌握其基本功能的使用. 二、实验内容 1.认识VISSIM的界面; 2.实现基本路段仿真; 3.设置行程时间检测器; 4.设置路径的连接和决策; 5.设置冲突区 三、实验步骤 1、界面认识: 2、(1)更改语言环境—(2)新建文件—(3)编辑基本路段—(4)添加车流量 3、(1)设置检测器—(2)运行仿真并输出评价结果 4、(1)添加出口匝道—(2)连接匝道—(3)添加路径决策—(4)运行仿真 5、(1)添加相交道路—(2)添加车流量—(3)设置冲突域—(4)仿真查看 四、实验结果与分析
时间; 行程时间; #Veh; 车辆类别; 全部; 编号: 1; 1; 3600; 18.8; 24; 可知:检测器起终点的平均行程时间为:18.8; 五、实验结论 1、检测器设置的地点不同,检测得到的行程时间也不同。但与仿真速度无关。 2、VISSIM仿真系统的数据录入比较麻烦,输入程序相对复杂。 实验报告二: 控制方式对十字交叉口运行效益影响的仿真分析 一、实验目的 掌握十字信号交叉口处车道组设置、流量输入、交通流路径决策及交通信号控制等仿真操作的方法和技巧。 二、实验内容 1.底图的导入 2.交叉口专用车道和混用车道的设置方法和技巧 3.交通信号设置 4.交叉口冲突区让行规则设置
实验四基于MATLAB的根轨迹绘制与性能分析 [实验目的] 1.掌握MATLAB下的根轨迹绘制方法; 2.学会利用根轨迹进行系统分析。 [实验指导] 1.根轨迹作图函数(命令):rlocus( ) 调用格式: ①rlocus(sys) 或rlocus(num,den) ②rlocus(sys,k) ①②画根轨迹图,①变化参量(一般是根轨迹增益)范围系统自动给出; ②变化参量(一般是根轨迹增益)范围在程序中给出; ③r=rlocus(sys) ④ [r,k]=rlocus(sys) ③④不画根轨迹图,③返回闭环根向量;④返回闭环根向量(r)和变化参量(k)。 2.根与根轨迹增益的求取 ⑴在根轨迹上点击,可得到该点的根值和对应的根轨迹增益值。 ⑵使用计算给定根的根轨迹增益的函数(命令):rlocfind( ) 调用格式: ①[k,poles]=rlocfind(sys) ②[k,poles]= rlocfind(sys,p) 使用方法:
①首先,当前根轨迹已绘出。运行该命令时,在根轨迹图中显示出十字光标,当用户选择其中一点时,其相应的增益由k 记录,与增益相关的所有极点记录poles 中;同时,在命令行窗口显示出来。 ②事先事先给出极点p ,运行该命令时,除了显示出该根对应的增益以外,还显示出该增益对应的其它根。 3.开环零点极点位置绘图函数(命令): pzmap( ) 调用格式: ① pzmap(sys) ② [p,z]=pzmap(sys) 函数功能: 给定系统数学模型,作出开环零点极点位置图。 ① 零点极点绘图命令。零点标记为“+”,极点标记为“o”。 ② 返回零点极点值,不作图。 4.根轨迹渐进线的绘制 当根轨迹渐进线与实轴的交点σa 已求出后,可得到方程11()n m a K s σ-=--, 这是根轨迹渐进线的轨迹方程。 将1()() n m a K G s s σ-= -作为一个开环传递函数,录入到MATLAB 中,再使用根 轨迹作图函数(命令)rlocus( ),生成的轨迹就是原根轨迹的渐进线。 5.举例 例1:开环传递函数1 ()(1)(2) K G s s s s =++绘制其闭环根轨迹。 程序: >> z=[];p=[0,-1,-2];k=1;sys=zpk(z,p,k);rlocus(sys) 运行结果:
(完整)交通仿真实验报告 编辑整理: 尊敬的读者朋友们: 这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望((完整)交通仿真实验报告)的内容能够给您的工作和学习带来便利。同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。 本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为(完整)交通仿真实验报告的全部内容。
土木工程与力学学院交通运输工程系 实 验 报 告 课程名称:交通仿真实验 实验名称:基于VISSIM的城市交通仿真实验 专业:交通工程 班级: 1002班 学号: U201014990 姓名:李波
指导教师: 刘有军 实验时间: 2013。09 -——- 2013.10 实验报告目录 实验报告一: 无控交叉口冲突区设置与运行效益仿真分析 实验报告二: 控制方式对十字交叉口运行效益影响的仿真分析 实验报告三: 信号交叉口全方式交通建模与仿真分析 实验报告四: 信号协调控制对城市干道交通运行效益的比较分析 实验报告五: 公交站点设置对交叉口运行效益的影响的仿真分析 实验报告六: 城市互通式立交交通建模与仿真分析 实验报告七: 基于VISSIM的城市环形交叉口信号控制研究 实验报告成绩
实验报告一: 无控交叉口冲突区设置与运行效益仿真分析 一、实验目的 熟悉交通仿真系统VISSIM软件的基本操作,掌握其基本功能的使用。 二、实验内容 1。认识VISSIM的界面; 2.实现基本路段仿真; 3.设置行程时间检测器; 4.设置路径的连接和决策; 5。设置冲突区 三、实验步骤 1、界面认识: 2、(1)更改语言环境—(2)新建文件—(3)编辑基本路段-(4)添加车流量 3、(1)设置检测器—(2)运行仿真并输出评价结果 4、(1)添加出口匝道—(2)连接匝道-(3)添加路径决策-(4)运行仿真 5、(1)添加相交道路—(2)添加车流量-(3)设置冲突域—(4)仿真查看 四、实验结果与分析
线性系统的根轨迹 一、 实验目的 1. 熟悉MATLAB 用于控制系统中的一些基本编程语句和格式。 2. 利用MATLAB 语句绘制系统的根轨迹。 3. 掌握用根轨迹分析系统性能的图解方法。 4. 掌握系统参数变化对特征根位置的影响。 二、 实验容 1. 请绘制下面系统的根轨迹曲线。 ) 136)(22()(22++++=s s s s s K s G ) 10)(10012)(1()12()(2+++++=s s s s s K s G )11.0012.0)(10714.0()105.0()(2++++= s s s s K s G 同时得出在单位阶跃负反馈下使得闭环系统稳定的K 值的围。 2. 在系统设计工具rltool 界面中,通过添加零点和极点方法,试凑出上述系统,并 观察增加极、零点对系统的影响。 三、 实验结果及分析 1.(1) ) 136)(22()(22++++=s s s s s K s G 的根轨迹的绘制: MATLAB 语言程序: num=[1];
den=[1 8 27 38 26 0]; rlocus(num,den) [r,k]=rlocfind(num,den) grid xlabel('Real Axis'),ylabel('Imaginary Axis') title('Root Locus') 运行结果: 选定图中根轨迹与虚轴的交点,单击鼠标左键得: selected_point = 0.0021 + 0.9627i k = 28.7425 r = -2.8199 + 2.1667i -2.8199 - 2.1667i -2.3313 -0.0145 + 0.9873i
*欧阳光明*创编 2021.03.07
I 摆杆惯量0.0034 kg*m*m g 重力加速度9.8 kg.m/s (2)直线一级倒立摆根轨迹校正控制原理 基于根轨迹法校正的基本思想是:假设系统的动态性能指标可由靠近虚轴的一对共轭闭环主导极点来表征,因此,可把对系统提出的时域性能指标的要求转化为一对期望闭环主导极点。确定这对闭环主导极点的位置后,首先根据绘制根轨迹的相角条件判断一下它们是否位于校正前系统的根轨迹上。如果这对闭环主导极点正好落在校正前系统的根轨迹上,则无需校正,只需调整系统的根轨迹增益即可;否则,可在系统中串联一个超前校正装置。 常见的校正器有超前校正、滞后校正以及超前滞后校正等。 2. 实验方法 (1)直线倒立摆建模、仿真与分析 利用牛顿-欧拉方法建立直线一级倒立摆系统的数学模型;依照根轨迹设计的步骤得到系统的控制器,利用MA TLAB Simulink中的工具进行仿真分析。 (3)直线一级倒立摆根轨迹校正控制 利用MATLAB Simulink来实现根轨迹校正控制参数设定和仿真,并利用该参数来设定只限一级倒立摆的根轨迹校正控制器值,分析和仿真倒立摆的运行情况。 3. 实验装置 直线单级倒立摆控制系统硬件结构框图如图1所示,包括计算机、I/O设备、伺服系统、倒立摆本体和光电码盘反馈测量元件等几大部分,组成了一个闭环系统。 图1 一级倒立摆实验硬件结构图 对于倒立摆本体而言,可以根据光电码盘的反馈通过换算获得小车的位移,小车的速度信号可以通过差分法得到。摆杆的角度由光电码盘检测并直接反馈到I/O设备,速度信号可以通过差分法得到。计算机从I/O设备中实时读取数据,确定控制策略(实际上是电
. I 线性系统实验报告 : 院系:航天学院 学号: . .
2015年12月
1.实验目的 1)熟悉Matlab/Simulink仿真; 2)掌握LQR控制器设计和调节; 3)理解控制理论在实际中的应用。 倒立摆研究的意义是,作为一个实验装置,它形象直观,简单,而且参数和形状易于改变;但它又是一个高阶次、多变量、非线性、强耦合、不确定的绝对不稳定系统的被控系统,必须采用十分有效的控制手段才能使之稳定。因此,许多新的控制理论,都通过倒立摆试验对理论加以实物验证,然后在应用到实际工程中去。因此,倒立摆成为控制理论中经久不衰的研究课题,是验证各种控制算法的一个优秀平台,故通过设计倒立摆的控制器,可以对控制学科中的控制理论有一个学习和实践机会。 2.实验容 1)建立直线二级倒立摆数学模型 对直线二级倒立摆进行数学建模,并将非线性数学模型在一定条件下化简成线性数学模型。对于倒立摆系统,由于其本身是自不稳定的系统,实验建立模型存在一定的困难,但是经过小心的假设忽略掉一些次要的因素后,倒立摆系统就是一个典型的运动的刚体系统,可以在惯性坐标系应用经典力学理论建立系统的动
力学方程。对于直线二级倒立摆,由于其复杂程度,在这里利用拉格朗日方程推导运动学方程。 由于模型的动力学方程中存在三角函数,因此方程是非线性的,通过小角度线性化处理,将动力学非线性方程变成线性方程,便于后续的工作的进行。 2)系统的MATLAB仿真 依据建立的数学模型,通过MATLAB仿真得出系统的开环特性,采取相应的控制策略,设计控制器,再加入到系统的闭环中,验证控制器的作用,并进一步调试。控制系统设计过程中需要分析容主要包括得出原未加控制器时系统的极点分布,系统的能观性,能控性。 3)LQR控制器设计与调节实验 利用线性二次型最优(LQR)调节器MATLAB仿真设计的参数结果对平面二阶倒立摆进行实际控制实验,参数微调得到较好的控制效果,记录实验曲线。 4)改变控制对象的模型参数实验 调整摆杆位置,将摆杆1朝下,摆杆2朝上修改模型参数、起摆条件和控制参数,重复3的容。 3.实验步骤
《电磁场与电磁波》课程 仿真实验报告 学号U201213977 姓名唐彬 专业电子科学与技术 院(系)光学与电子信息学院2014 年12 月 3 日
1.实验目的 学会HFSS仿真波导的步骤,画出波导内场分布图,理解波的传播与截止概念。 2.实验内容 在HFSS中完成圆波导的设计与仿真,要求完成电场、磁场、面电流分布、传输曲线、色散曲线和功率的仿真计算。 3.仿真模型 (1)模型图形 (2)模型参数
(3)仿真计算参数 根据圆波导主模为TE 11, 1111 '=1.841 c f a p ==为半径, a=1mm,代入公式得截止频率f=8.8GHz,因此设置求解频率为11GHz,起始频率为9GHz,终止频率为35GHz。 4.实验结果及分析 4..1电场分布图
图形分析:将垂直于Z周的两个圆面设为激励源,利用animate选项可以发现,两个圆面上的电场强度按图中的颜色由红变蓝周期性变化,图形呈椭圆形,且上底面中心为红色时,下底面中心为蓝色。即上底面中心的电场强度最大时,下底面中心的电场强度为最小。这是由于波的反射造成的。对于圆波导的侧面,由动态图可知电场强度始终处于蓝绿色,也就是一直较小。这说明电场更多的是在两底面,即两激励源之间反射,反射到侧面上的电场较少。 4..2磁场分布图
图形分析:根据电场与磁场的关系式——课本式(9.46)可知,电场的大小是磁场大小的c倍(c为真空中的光速),电场方向与磁场方向处处垂直,在图中也可看出,波导中磁场的最大值出现在侧面,两底面的中心的颜色为蓝绿色,且底面的两边为双曲线的形状,这就是磁场与电场相互垂直的结果。另一方面,根据图中各个颜色代表的场强大小也可以近似验证,电场与磁场的大小的确是c倍的关系。而且在导体中的电磁波,磁场与电场还存在相位差,这一点也可从两者的动态图中验证该结论。
. 课程名称:控制理论乙指导老师:成绩: 实验名称:控制系统的根轨迹分析实验类型:同组学生姓名: 一、实验目的和要求(必填)二、实验内容和原理(必填) 三、主要仪器设备(必填)四、操作方法和实验步骤 五、实验数据记录和处理六、实验结果与分析(必填) 七、讨论、心得 一、实验目的和要求 1.掌握用计算机辅助分析法分析控制系统的根轨迹 2.熟练掌握Simulink仿真环境 二、实验内容和原理 1.实验内容 一开环系统传递函数为 k(s?2)?s)G(22(s?4s?3)绘制出此闭环系统的根轨迹,并分析系统的稳定性。 2.实验原理 根轨迹是指,当开环系统某一参数(一般来说,这一参数选作开环系统的增益k)从零变到无穷大时,死循环系统特征方程的根在s平面上的轨迹。因此,从根轨迹,可分析系统的稳定性、稳态性能、动态性能。同时,对于设计系统可通过修改设计参数,使闭环系统具有期望的零极点分布,因此根轨迹对系统设等。pzmap,rlocus,rlocfind计也具有指导意义。在MATLAB中,绘制根轨迹有关的函数有:3.实验要求 (1)编制MATLAB程序,画出实验所要求根轨迹, 求出系统的临界开环增益,并用闭环系统的冲击响应证明之。 (2)在Simulink仿真环境中,组成系统的仿真框图,观察临界开环增益时系统单位阶跃响应曲线并记录之。三、主要仪器设备 仿真环境simulink计算机一台以及matlab软件,四、实验源代码 >> A=[1 2]; >> B=conv([1 4 3],[1 4 3]); >> G=tf(A,B) G = s + 2 ------------------------------- s^4 + 8 s^3 + 22 s^2 + 24 s + 9 Continuous-time transfer function. >> figure
本科生实验报告
填写说明 1、适用于本科生所有的实验报告(印制实验报告册除外); 2、专业填写为专业全称,有专业方向的用小括号标明; 3、格式要求: ①用A4纸双面打印(封面双面打印)或在A4大小纸上用蓝黑色水笔书写。 ②打印排版:正文用宋体小四号,1.5倍行距,页边距采取默认形式(上下2.54cm,左 右2.54cm,页眉1.5cm,页脚1.75cm)。字符间距为默认值(缩放100%,间距:标准); 页码用小五号字底端居中。 ③具体要求: 题目(二号黑体居中); 。
实验一数控车床操作加工仿真实验 一、实验目的 1、掌握手工编程的步骤。 2、掌握数控加工仿真系统的操作流程。 二、实验内容 1、了解数控仿真软件的应用背景。 2、掌握手工编程的步骤。 3、掌握SEMENS 802Se T 数控加工仿真操作流程。 三、实验设备 1、AUTO CAD 2014。 2、南京宇航数控加工仿真软件。 四、实验操作步骤 1、实验试件 试件的形状、尺寸如图1-1所示 2、加工采用的刀具参数 刀具及相关参数如表1-1所示 3、工序卡片根据零件材料、加工精度、加工路线、刀具参数表和切削用量等内容,确定加 工工序卡,如表1-2所示。 4、程序 5、加工仿真操作步骤
五、加工视窗 Yhcnc 输出信息 消息模式 欢迎使用YHCNC, 更多资料请登录https://www.doczj.com/doc/a07257465.html, 2017-03-29 15:20 。。。 评分模式 欢迎使用YHCNC, 更多资料请登录https://www.doczj.com/doc/a07257465.html, 2017-03-29 15:20 。。。 六、思考题 1、数控加工中的误差来源有哪些? 答:
课程名称: 控制理论乙 指导老师: 成绩: 实验名称: 控制系统的根轨迹分析 实验类型: 同组学生姓名: 一、实验目的和要求(必填) 二、实验容和原理(必填) 三、主要仪器设备(必填) 四、操作法和实验步骤 五、实验数据记录和处理 六、实验结果与分析(必填) 七、讨论、心得 一、实验目的和要求 1. 掌握用计算机辅助分析法分析控制系统的根轨迹 2. 熟练掌握Simulink 仿真环境 二、实验容和原理 1. 实验容 一开环系统传递函数为 22) 34()2()(+++=s s s k s G 绘制出此闭环系统的根轨迹,并分析系统的稳定性。 2. 实验原理 根轨迹是指,当开环系统某一参数(一般来说,这一参数选作开环系统的增益k )从零变到无穷大时,死循环系统特征程的根在s 平面上的轨迹。因此,从根轨迹,可分析系统的稳定性、稳态性能、动态性能。同时,对于设计系统可通过修改设计参数,使闭环系统具有期望的零极点分布,因此根轨迹对系统设计也具有指导意义。在MATLAB 中,绘制根轨迹有关的函数有:rlocus ,rlocfind ,pzmap 等。 3. 实验要求 (1)编制MATLAB 程序,画出实验所要求根轨迹, 求出系统的临界开环增益,并用闭环系统的冲击响应证明之。 (2)在Simulink 仿真环境中,组成系统的仿真框图,观察临界开环增益时系统单位阶跃响应曲线并记录之。 三、主要仪器设备 计算机一台以及matlab 软件,simulink 仿真环境 四、实验源代码 >> A=[1 2]; >> B=conv([1 4 3],[1 4 3]); >> G=tf(A,B) G = s + 2 ------------------------------- s^4 + 8 s^3 + 22 s^2 + 24 s + 9 Continuous-time transfer function. >> figure >> pzmap(G)
专业实验报告
(2)直线一级倒立摆根轨迹校正控制原理 基于根轨迹法校正的基本思想是:假设系统的动态性能指标可由靠近虚轴的一对共轭闭环主导极点来表征,因此,可把对系统提出的时域性能指标的要求转化为一对期望闭环主导极点。确定这对闭环主导极点的位置后,首先根据绘制根轨迹的相角条件判断一下它们是否位于校正前系统的根轨迹上。如果这对闭环主导极点正好落在校正前系统的根轨迹上,则无需校正,只需调整系统的根轨迹增益即可;否则,可在系统中串联一个超前校正装置。 常见的校正器有超前校正、滞后校正以及超前滞后校正等。 2. 实验方法 (1)直线倒立摆建模、仿真与分析 利用牛顿-欧拉方法建立直线一级倒立摆系统的数学模型;依照根轨迹设计的步骤得到系统的控制器,利用MATLAB Simulink中的工具进行仿真分析。 (3)直线一级倒立摆根轨迹校正控制 利用MATLAB Simulink来实现根轨迹校正控制参数设定和仿真,并利用该参数来设定只限一级倒立摆的根轨迹校正控制器值,分析和仿真倒立摆的运行情况。 3. 实验装置 直线单级倒立摆控制系统硬件结构框图如图1所示,包括计算机、I/O设备、伺服系统、倒立摆本体和光电码盘反馈测量元件等几大部分,组成了一个闭环系统。 图1 一级倒立摆实验硬件结构图 对于倒立摆本体而言,可以根据光电码盘的反馈通过换算获得小车的位移,小车的速度信号可以通过差分法得到。摆杆的角度由光电码盘检测并直接反馈到I/O设备,速度信号可以通过差分法得到。计算机从I/O设备中实时读取数据,确定控制策略(实际上是电机的输出力矩),并发送给I/O设备,I/O设备产生相应的控制量,交与伺服驱动器处理,然后使电机转动,带动小车运动,保持摆杆平衡。
武汉工程大学自动控制原理实验报告 专业班级:指导老师: 姓名:学号: 实验名称:系统根轨迹分析 实验日期:2011-12-01 第三次试验 一、实验目的 1、掌握利用MATLAB精确绘制闭环系统根轨迹的方法; 2、了解系统参数或零极点位置变化对系统根轨迹的影响; 二、实验设备 1、硬件:个人计算机 2、软件:MATLAB仿真软件(版本6.5或以上) 实验内容
1.根轨迹的绘制 1) 将系统特征方程改成为如下形式:1 + KG ( s ) = 1 + K ) () (s q s p =0, 其中,K 为我们所关心的参数。 2) 调用函数 r locus 生成根轨迹。 关于函数 rlocus 的说明见图 3.1。 不使用左边的选项也能画出根轨迹,使用左边的选项时,能 返回分别以矩阵和向量形式表征的特征根的值及与之对应的增益值。 图3.1 函数rlocus 的调用 例如,图 3.2 所示系统特征根的根轨迹及其绘制程序见图 3.3。 图3.2 闭环系统一
图3.3 闭环系统一 的根轨迹及其绘制 程序 注意:在这里,构成系统s ys 时,K 不包括在其中,且要使分子和分母中s最高
次幂项的系数为1。 当系统开环传达函数为零、极点形式时,可调用函数 z pk 构成系统 s ys : sys = zpk([zero],[pole],1); 当系统开环传达函数无零点时,[zero]写成空集[]。 对于图 3.2 所示系统, G(s)H(s)= )2()1(++s s s K *11+s =) 3)(2() 1(+++s s s s K . 可如下式调用函数 z pk 构成系统 s ys : sys=zpk([-1],[0 -2 -3],1) 若想得到根轨迹上某个特征根及其对应的 K 的值,一种方法是在调用了函数 rlocus 并得到了根 轨迹后调用函数 r locfind 。然后,将鼠标移至根轨迹图上会出现一个可移动的大十字。将该十字的 中心移至根轨迹上某点,再点击鼠标左键,就可在命令窗口看到该点对应的根值和 K 值了。另外一种 较为方便的做法是在调用了函数 rlocus 并得到了根轨迹后直接将鼠标移至根轨迹图中根轨迹上某点 并点击鼠标左键,这时图上会出现一个关于该点的信息框,其中包括该系统在此点的特征根的值及其 对应的 K 值、超调量和阻尼比等值。图 3.4 给出了函数 r locfind 的用法。 2.实验内容 图3.5 闭环系统二 1) 对于图 3.5 所示系统,编写程序分别绘制当 (1) G(s)= )2(+s s K , (2) G(s)= ) 4)(1(++s s s K ,
单级倒立摆实验报告 1. 单级倒立摆系统的建模 单级倒立摆系统的建模可采用受力分析或Lagrange 方程建立得到。这里采用受力分析方法建模。如图所示: 根据牛顿第二定律: (cos )0Mx m x L u θθ++-= (2-1) cos sin 0mLx I mLg θθθ--= (2-2) 以摆杆偏角θ、角速度θ 、小车的位移x 和 小车速度x 为状态变量,即令: () T X x x θθ= (2-3) 同时假设倒立摆摆杆的垂直倾斜角度θ与1 (单位为rad )相比很小,即1θ 。 则可以近似处理:cos θ≈1,sin 0θ≈,并 忽略高阶小量,则可得: 2222 ()()m L g I x u I m M mML I m M mML θ=+++++ (2-4) 22 ()()()mL m M g mL u I m M mML I m M mML θ θ+=-+++++ (2-5) 摆杆系统的状态方程为: 1222 2122 344122 ()()()()()x x m L g I x x u I m M mML I m M mML x x mL m M g mL x x u I m M mML I m M mML =???=+?++++? =??+=-+?++++? (2-6) 写成向量的形式为: X AX Bu y CX Du ?=+? =+? (2-7) 其中
0100000A 00010 00a b ?? ? ?= ? ? ??, 00c B d ?? ? ?= ? ??? ,10000010C ??= ???,00D ??= ??? (2-8) 参数a 、b 、c 、d 分别为: 222()m L g b I m M mML = ++ (2-9) 2 ()()mL m M g a I m M mML +=- ++ (2-10) 2 ()I c I m M mML = ++ (2-11) 2 ()mL d I m M mML =++ (2-12) 选择摆杆的倾斜角度θ和小车的水平位移x 作为系统的输出,则输出方程为: y CX = (2-13) 根据金棒-2型倒立摆系统实验平台的参数,m=0.2kg ,M=0.6kg ,L=0.158m ,I=0.001654kg.m 2 ,g=10N/kg.同时,这里建模时候使用的u是以力作为输入信号的,实际上采用的是以电压作为输入信号,通过电机作了一定的转化,这里我们约定:先暂时以力作为输入信号,最后再统一处理。则有,a=2.3121,b=-58.5337,c=0.3830,d=7.3167。 因此,010000 2.31210A 00010058.53370?? ? ?= ? ?-??,00.383007.3167B ?? ? ?= ? ??? 2. 全状态反馈设计 2.1. 检验系统可控性 可控性矩阵纯ctrB=105 *0 00.00020.005300.00020.00530.148200.0001-0.00310.09370.0001-0.00310.0937 2.5164-????--? ?????-?? 显然rank(ctrB)=4,系统可控. 2.2. 反馈设计 要求:稳定调节时间3s n t s π ξω= <,摆角5θ< ,(5/90100) 5.56p σ