实验四线性时不变离散时间系统的频域分析
Name:Chen yifan 20112121006
Section:
Laboratory Exercise 4
LINEAR, TIME-INVARIANT DISCRETE-TIME SYSTEMS:
FREQUENCY-DOMAIN REPRESENTATIONS
4.1 TRANSFER FUNCTION AND FREQUENCY RESPONSE
Project 4.1 Transfer Function Analysis
Answers:
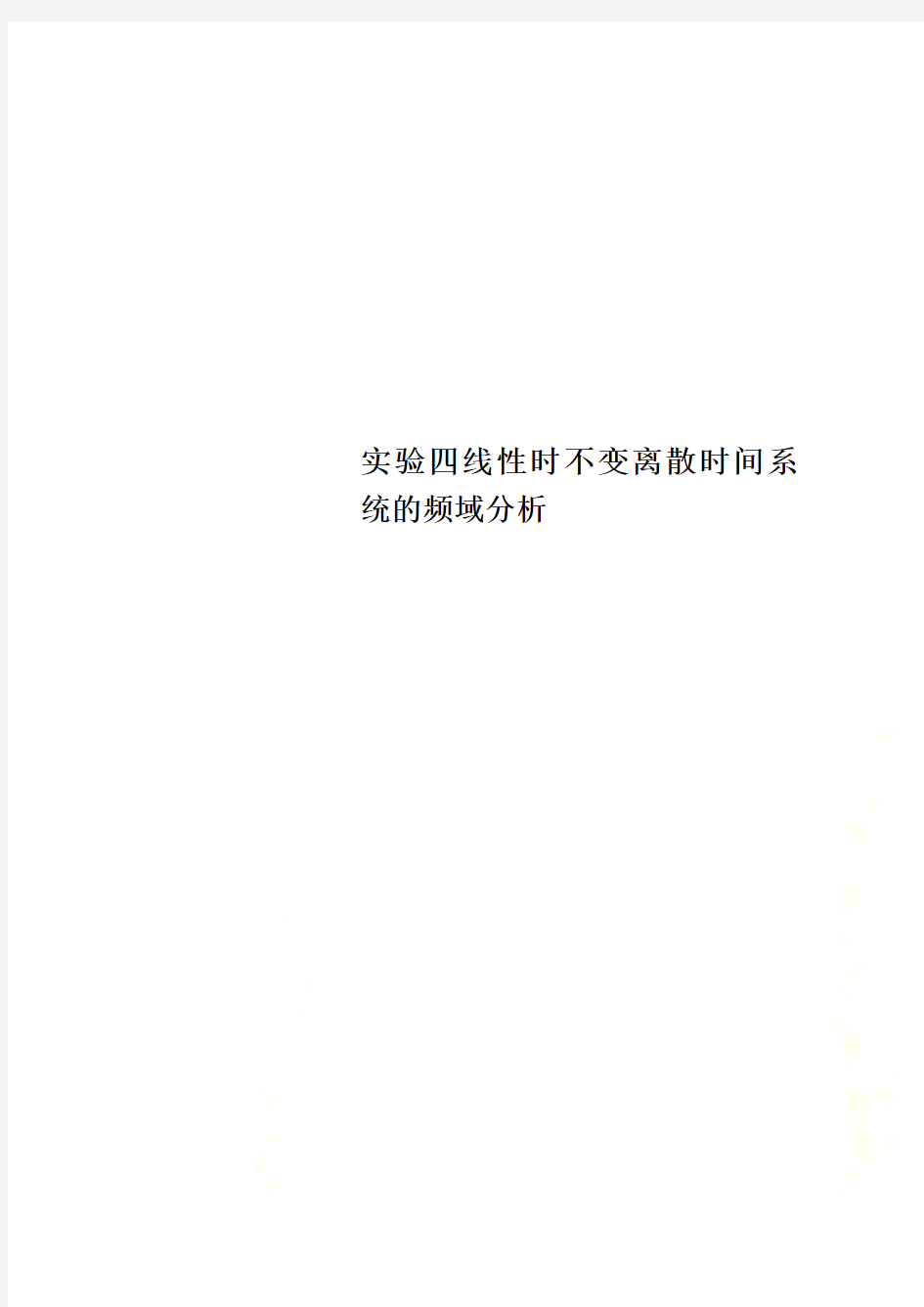
Q4.1 The modified Program P3_1 to compute and plot the magnitude and phase spectra of a moving average filter of Eq. (2.13) for0 ≤ω≤2π is shown below:
< Insert program code here. Copy from m-file(s) and paste. >
w=0:pi/511:2*pi;
M=input('M= ');
num=ones(1,M)/M;
h=freqz(num,1,w);
subplot(2,1,1);
plot(w/pi,abs(h));grid;
title('H(e^{j\omega})幅度谱');
xlabel('\omega/\pi');ylabel('振幅');
subplot(2,1,2);
plot(w/pi,angle(h));grid;
title('相位谱 H(e^{j\omega})');
xlabel('\omega/\pi');ylabel('以弧度为单位的相位');
This program was run for the following three different values of M and the plots of the corresponding frequency responses are shown below:
< Insert MATLAB figure(s) here. Copy from figure window(s) and paste. > The types of symmetries exhibited by the magnitude and phase spectra are due to -
The type of filter represented by the moving average filter is
M=3
- 0
0.5
1
H(e j ω)幅度谱
ω/π
振幅
-4-2024
相位谱 H(e j ω)
ω/π
以弧度为单位的相位
M=10;
00.20.40.60.8
1 1.
2 1.4 1.6 1.82
0.5
1
H(e j ω)幅度谱
ω/π
振幅
0.2
0.4
0.6
0.8
1 1.2
1.4
1.6
1.8
2
-4-2024
相位谱 H(e j ω)
ω/π
以弧度为单位的相位
M=20;
00.20.40.60.8
1 1.
2 1.4 1.6 1.82
0.5
1
1.5H(e j ω)幅度谱
ω/π
振幅
0.2
0.4
0.6
0.8
1 1.2
1.4
1.6
1.8
2
-4-2024
相位谱 H(e j ω)
ω/π
以弧度为单位的相位
The results of Question Q2.1 can now be explained as follows - By the graph, you can see
that it represents a low-pass filter.
Q4.2
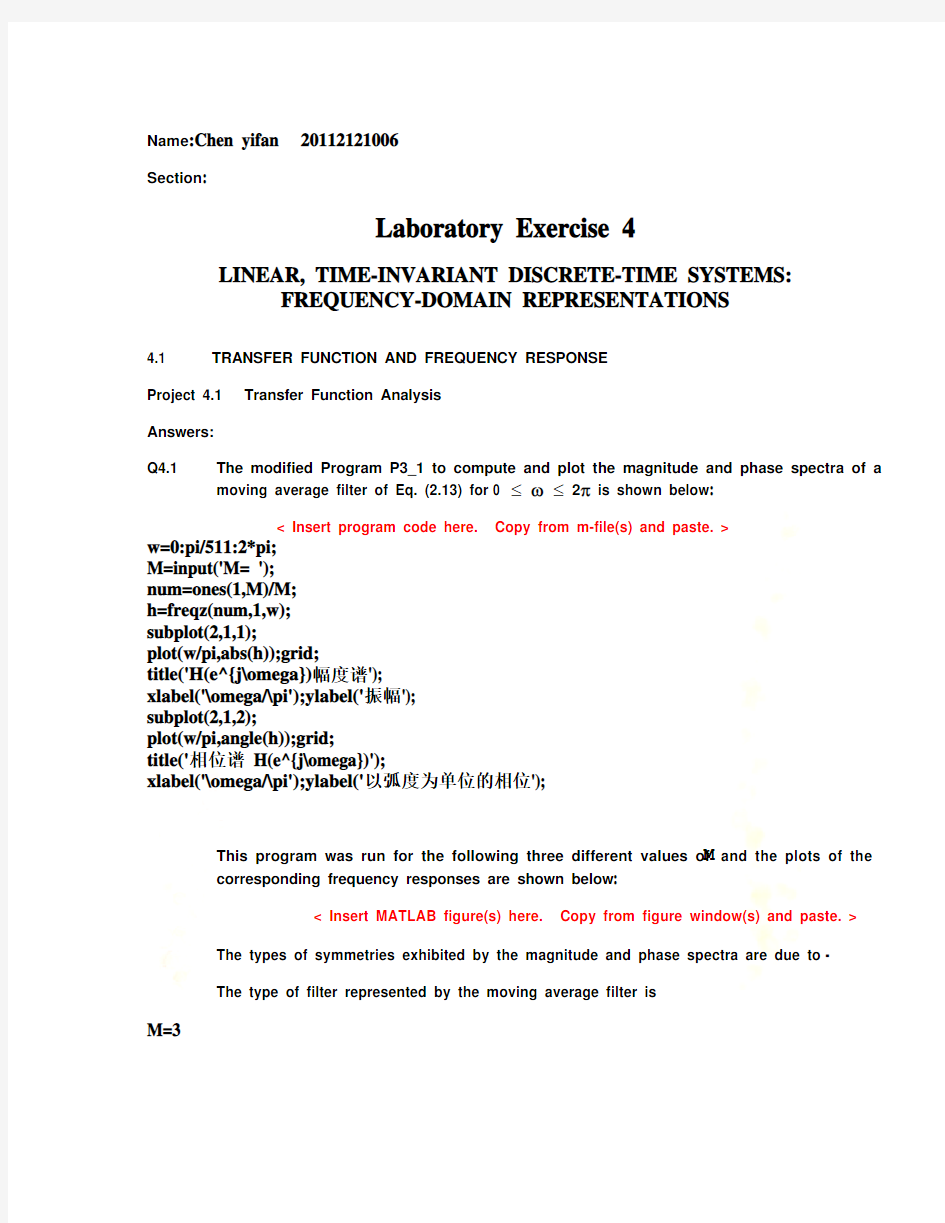
The plot of the frequency response of the causal LTI discrete-time system of Question Q4.2 obtained using the modified program is given below :
< Insert MATLAB figure(s) here. Copy from figure window(s) and paste. >
w=0:pi/511:pi;
num=[0.15 0 -0.15]; den=[1 -0.5 0.7];
h=freqz(num,den,w); subplot(2,1,1);
plot(w/pi,abs(h));grid;
title('H(e^{j\omega})幅度谱'); xlabel('\omega/\pi');ylabel('振幅'); subplot(2,1,2);
plot(w/pi,angle(h));grid;
title('相位谱 H(e^{j\omega})');
xlabel('\omega/\pi');
ylabel('以弧度为单位的相位');
00.10.20.30.4
0.50.60.70.80.91
0.5
1
H(e j ω)幅度谱
ω/π
振幅
0.1
0.2
0.3
0.4
0.50.6
0.7
0.8
0.9
1
-2-1012
相位谱 H(e j ω)
ω/π
以弧度为单位的相位
The type of filter represented by this transfer function is -
It says
bandpass filter is obtained by diagrams can be BPF
Q4.3
The plot of the frequency response of the causal LTI discrete-time system of Question Q4.3 obtained using the modified program is given below :
< Insert MATLAB figure(s) here. Copy from figure window(s) and paste. >
w=0:pi/511:pi;
num=[0.15 0 -0.15]; den=[0.7 -0.5 1]
h=freqz(num,den,w); subplot(2,1,1);
plot(w/pi,abs(h));grid;
title('H(e^{j\omega})幅度谱'); xlabel('\omega/\pi');ylabel('振幅'); subplot(2,1,2);
plot(w/pi,angle(h));grid;
title('相位谱 H(e^{j\omega})'); xlabel('\omega/\pi');
ylabel('以弧度为单位的相位');
00.10.20.30.4
0.50.60.70.80.91
0.5
1
H(e j ω)幅度谱
ω/π
振幅
0.1
0.2
0.3
0.4
0.50.6
0.7
0.8
0.9
1
-4-2024
相位谱 H(e j ω)
ω/π
以弧度为单位的相位
The type of filter represented by this transfer function is -
O causal linear
time-invariant discrete time system
frequency response, determine the type filter
The difference between the two filters of Questions 4.2 and 4.3 is -
More on
the topic of figure, the amplitude spectrum is
the same, the phase spectrum, on the topic
that is continuous, and kinds of phase jump line, .
the
I shall choose the filter of Question Q4.3 for the following reason -
amplitude spectrum is the same, the phase spectrum, on the topic that is continuous,
and kinds of phase jump line .
Q4.6 The pole-zero plots of the two filters of Questions 4.2 and 4.3 developed using zplane are shown below:
w=0:pi/511:pi;
num=[0.15 0 -0.15];
den=[1 -0.5 0.7];
h=zplane(num,den);
w=0:pi/511:pi;
num=[0.15 0 -0.15];
den=[0.7 -0.5 1];
h=zplane(num,den);
< Insert MATLAB figure(s) here. Copy from figure window(s) and paste. >
-1
-0.5
00.5
1
-1
-0.8-0.6-0.4-0.200.20.4
0.60.81Real Part
I m a g i n a r y P a r t
-1.5
-1
-0.5
00.5
1
1.5
-1-0.5
0.5
1
Real Part
I m a g i n a r y P a r t
From these plots we make the following observations : Different function, zero zero and pole
pole figure with different relative position of the circle
4.2 TYPES OF TRANSFER FUNCTIONS
Project 4.2 Filters A copy of Program P4_1 is given below :
< Insert program code here. Copy from m-file(s) and paste. >
clf;
fc=0.25;
n=[-6.5:1:6.5];
y=2*fc*sinc(2*fc*n); k=n+6.5;
stem(k,y); title('N=13'); axis([0 13 -0.2 0.6]); xlabel('时间序号 n'); ylabel('振幅'); grid
-0.2
-0.100.10.20.3
0.40.50.6N=13
时间序号 n
振幅
Answers: Q4.7
The plot of the impulse response of the approximation to the ideal lowpass filter obtained using Program P4_1 is shown below :
< Insert MATLAB figure(s) here. Copy from figure window(s) and paste. >
clf;
fc=0.25;
n=[-6.5:1:6.5];
y=2*fc*sinc(2*fc*n);k=n+6.5;
stem(k,y);title('N=13');axis([0 13 -0.2 0.6]); xlabel('时间序号 n');ylabel('振幅');grid
The length of the FIR lowpass filter is -14
The statement in Program P4_1 determining the filter length is - n=[-6.5:1:6.5]; The parameter controlling the cutoff frequency is -
Fc parameters
control the cutoff frequency
Q4.8
The required modifications to Program P4_1 to compute and plot the impulse response of the FIR lowpass filter of Project 4.2 with a length of 20 and a cutoff frequency of c =
0.45 are as indicated below :
< Insert program code here. Copy from m-file(s) and paste. >
clf;
fc=0.45/(2*pi);
n=[-9.5:1:9.5];
y=2*fc*sinc(2*fc*n);k=n+9.5;
stem(k,y);title('N=20');axis([0 20 -0.2 0.6]); xlabel('时间序号 n');ylabel('振幅');grid
The plot generated by running the modified program is given below :
< Insert MATLAB figure(s) here. Copy from figure window(s) and paste. >
02468
101214161820
-0.2
-0.100.10.20.30.40.50.6N=20
时间序号 n
振幅
Q4.9
The required modifications to Program P4_1 to compute and plot the impulse response of the FIR lowpass filter of Project 4.2 with a length of 15 and a cutoff frequency of c =
0.65 are as indicated below :
< Insert program code here. Copy from m-file(s) and paste. >
clf;
fc=0.65/(2*pi); n=[-7.5:1:6.5];
y=2*fc*sinc(2*fc*n);k=n+7.5;
stem(k,y);title('N=15');axis([0 14 -0.2 0.6]); xlabel('时间序号 n');ylabel('振幅');grid
The plot generated by running the modified program is given below :
< Insert MATLAB figure(s) here. Copy from figure window(s) and paste. >
024
68101214
-0.2
-0.100.10.20.30.40.50.6N=15
时间序号 n
振幅
Q4.11
A plot of the gain response of a length-2 moving average filter obtained using Program P4_2 is shown below :
< Insert MATLAB figure(s) here. Copy from figure window(s) and paste. >
unction [g,w]=gain(num,den) --gain 函数 w=0:pi/255:pi;
h=freqz(num,den,w); g=20*log10(abs(h));
M=2; --滑动平均低通滤波器的增益响应程序 num=ones(1,M)/M; [g,w]=gain(num,1); plot(w/pi,g);grid; axis([0 1 -50 0.5])
xlabel('\omega/\pi');ylabel('单位为db 的增益'); title(['M= ',num2str(M)])
0.1
0.2
0.3
0.4
0.50.6
0.7
0.8
0.9
1
-50-45-40-35-30-25-20-15
-10-50ω/π
单位为d b 的增益
M= 2
From the plot it can be seen that the 3-dB cutoff frequency is at -3dB 。
Q4.12
The required modifications to Program P4_2 to compute and plot the gain response of a cascade of K length-2 moving average filters are given below :
< Insert program code here. Copy from m-file(s) and paste. >
function [g,w]=gainlink(num,den) \ w=0:pi/255:pi;
h=freqz(num,den,w); H=h.*h.*h;
g=20*log10(abs(H)); wc=2*acos(2^(-1/(2*3))) wc =0.9430 wc =0.3*pi
The plot of the gain response for a cascade of 3 sections obtained using the modified program is shown below :
< Insert MATLAB figure(s) here. Copy from figure window(s) and paste.
>
00.10.20.30.40.50.60.70.80.91
-50
-45
-40
-35
-30
-25
-20
-15
-10
-5
ω/π
单
位
为
d
b
的
增
益
From the plot it can be seen that the 3-dB cutoff frequency of the cascade is at -
\ wc=0.3*pi\
Q4.19 A copy of Program P4_3 is given below:
< Insert program code here. Copy from m-file(s) and paste. > clf;
b=[1 -8.5 30.5 -63];
num1=[b 81 fliplr(b)];
num2=[b 81 81 fliplr(b)];
num3=[b 0 -fliplr(b)];
num4=[b 81 -81 -fliplr(b)];
n1=0:length(num1) -1;
n2=0:length(num2) -1;
subplot(2,2,1); stem(n1,num1);
xlabel('时间序号 n'); ylabel('振幅'); grid; title('1 型有限冲激响应滤波器');
subplot(2,2,2); stem(n2,num2);
xlabel('时间序号 n'); ylabel('振幅'); grid; title('2 型有限冲激响应滤波器');
subplot(2,2,3); stem(n1,num3);
xlabel('时间序号 n'); ylabel('振幅'); grid; title('3 型有限冲激响应滤波器');
subplot(2,2,4); stem(n2,num4);
xlabel('时间序号 n'); ylabel('振幅'); grid; title('4 型有限冲激响应滤波器');
pause
subplot(2,2,1); zplane(num1,1);
title('1 型有限冲激响应滤波器');
subplot(2,2,2); zplane(num2,1);
title('2 型有限冲激响应滤波器');
subplot(2,2,3); zplane(num3,1);
title('3 型有限冲激响应滤波器');
subplot(2,2,4); zplane(num4,1);
title('4 型有限冲激响应滤波器');
disp('1 型有限冲激响应滤波器的零点是'); disp(roots(num1));
disp('2 型有限冲激响应滤波器的零点是'); disp(roots(num2));
disp('3 型有限冲激响应滤波器的零点是'); disp(roots(num3));
disp('4 型有限冲激响应滤波器的零点是');
disp(roots(num4));
The plots of the impulse responses of the four FIR filters generated by running Program P4_3 are given below :
< Insert MATLAB figure(s) here. Copy from figure window(s) and paste.>
2
468-100
-50050
100时间序号 n
振幅
1 型有限冲激响应滤波器0
510-100
-50050
100时间序号 n
振幅
2 型有限冲激响应滤波器
2
468
-100
-50050
100时间序号 n
振幅
3 型有限冲激响应滤波器
5
10
-100
-50050
100时间序号 n
振幅
4 型有限冲激响应滤波器
From the plots we make the following observations :
Filter #1 is of length _____8_____ with a ___80_______ impulse response and is therefore a Type __ linear-phase FIR filter .
Filter #2 is of length ____10______ with a ___80_______ impulse response and is therefore a Type __ linear-phase FIR filter .
Filter #3 is of length ______8____ with a ___60_______ impulse response and is therefore a Type __ linear-phase FIR filter .
Filter #4 is of length ______10____ with a___80_______ impulse response and is therefore a Type __ linear-phase FIR filter.
From the zeros of these filters generated by Program P4_3 we observe that:
Filter #1 has zeros at z = 2.9744,2.0888 ,0.9790 + 1.4110i,0.9790 - 1.4110i, 0.3319 + 0.4784i, 0.3319 - 0.4784i,0.4787,0.3362
Filter #2 has zeros at z = 3.7585 + 1.5147i,3.7585 - 1.5147i,0.6733 + 2.6623i,0.6733 - 2.6623i,-1.0000 ,0.0893 + 0.3530i,0.0893 - 0.3530i,0.2289 + 0.0922i,0.2289 - 0.0922i
Filter #3 has zeros at z = 4.7627 ,1.6279 + 3.0565i,1.6279 - 3.0565i,-1.0000 ,1.0000 0.1357 + 0.2549i,0.1357 - 0.2549i,0.2100
Filter #4 has zeros at z = 3.4139 ,1.6541 + 1.5813i,1.6541 - 1.5813i,-0.0733 + 0.9973i,-0.0733 - 0.9973i,1.0000 ,0.3159 + 0.3020i,0.3159 - 0.3020i,0.2929
Plots of the phase response of each of these filters obtained using MATLAB are shown below:
< Insert MATLAB figure(s) here. Copy from figure window(s) and paste. >
-1
0123-1018
Real Part
I m a g i n a r y P a r t
1 型有限冲激响应滤波器-2
24
-2
-10129
Real Part
I m a g i n a r y P a r t
2 型有限冲激响应滤波器
-2
246
-2
02
8
Real Part
I m a g i n a r y P a r t
3 型有限冲激响应滤波器
-1
123
-1019
Real Part
I m a g i n a r y P a r t
4 型有限冲激响应滤波器
From these plots we conclude that each of these filters have ______linear____ phase .
Q4.20
The plots of the impulse responses of the four FIR filters generated by running Program P4_3 are given below :
< Insert MATLAB figure(s) here. Copy from figure window(s) and paste. >
2
468-50
050
100
时间序号 n
振幅
1 型有限冲激响应滤波器0
510-50
50
100
时间序号 n
振幅
2 型有限冲激响应滤波器
2
468
-10-505
10时间序号 n
振幅
3 型有限冲激响应滤波器
5
10
-100
-50050
100时间序号 n
振幅
4 型有限冲激响应滤波器
From the plots we make the following observations :
Filter #1 is of length _____8_____ with a ___80_______ impulse response and is
therefore a Type __ linear-phase FIR filter .
Filter #2 is of length ____10______ with a ___80_______ impulse response and is therefore a Type __ linear-phase FIR filter . Filter #3 is of length _____8_____ with a _____5_____ impulse response and is
therefore a Type __ linear-phase FIR filter .
Filter #4 is of length ____10______ with a ____80______ impulse response and is therefore a Type __ linear-phase FIR filter .
From the zeros of these filters generated by Program P4_3 we observe that :
Filter #1 has zeros at z = 2.3273 + 2.0140i,2.3273 - 2.0140i,-1.2659 + 2.0135i,-1.2659 -
2.0135i, -0.2238 + 0.3559i,-0.2238 - 0.3559i,0.2457 + 0.2126i,0.2457 - 0.2126i
Filter #2 has zeros at z
= 2.5270 + 2.0392i, 2.5270 - 2.0392i,-1.0101 +
2.1930i.-1.0101 - 2.1930i,-1.0000 ,-0.1733 + 0.3762i,-0.1733 - 0.3762i,0.2397 + 0.1934i,0.2397 - 0.1934i
Filter #3 has zeros at z = -1.0000 ,0.2602 + 1.2263i,0.2602 - 1.2263i,1.0000 ,0.6576 +
0.7534i,0.6576 - 0.7534i,0.1655 + 0.7803i,0.1655 - 0.7803i
Filter #4 has zeros at z = 2.0841 + 2.0565i,2.0841 - 2.0565i,-1.5032 + 1.9960i,-1.5032 -
1.9960i,1.0000 ,-0.2408 + 0.3197i,-0.2408 - 0.3197i,0.2431 + 0.2399i,0.2431 - 0.2399i
Plots of the phase response of each of these filters obtained using MATLAB are shown below :
< Insert MATLAB figure(s) here. Copy from figure window(s) and paste. >
-2
02-2-1012
8
Real Part
I m a g i n a r y P a r t
1 型有限冲激响应滤波器-2
02-2-1012
9
Real Part
I m a g i n a r y P a r t
2 型有限冲激响应滤波器-1
01
-1
-0.500.51
8
Real Part
I m a g i n a r y P a r t
3 型有限冲激响应滤波器
-2
2
-2
-10129
Real Part
I m a g i n a r y P a r t
4 型有限冲激响应滤波器
From these plots we conclude that each of these filters have ___linear_______ phase .
实验一 离散系统稳定性分析 实验学时:2 实验类型:常规 实验要求:必作 一、实验目的: (1)掌握利用MATLAB 绘制系统零极点图的方法; (2)掌握离散时间系统的零极点分析方法; (3)掌握用MATALB 实现离散系统频率特性分析的方法; (4)掌握逆Z 变换概念及MATLAB 实现方法; (5)掌握用MATLAB 分析离散系统稳定性。 二、实验原理: 1、离散系统零极点图及零极点分析; 线性时不变离散系统可用线性常系数差分方程描述,即 ()()N M i j i j a y n i b x n j ==-= -∑∑ (8-1) 其中()y k 为系统的输出序列,()x k 为输入序列。 将式(8-1)两边进行Z 变换的 00 ()()()() () M j j j N i i i b z Y z B z H z X z A z a z -=-== = = ∑∑ (8-2) 将式(8-2)因式分解后有: 11 () ()() M j j N i i z q H z C z p ==-=- ∏∏ (8-3) 其中C 为常数,(1,2,,)j q j M = 为()H z 的M 个零点,(1,2,,)i p i N = 为()H z 的N 个极点。 系统函数()H z 的零极点分布完全决定了系统的特性,若某系统函数的零极点已知,则系统函数便可确定下来。 因此,系统函数的零极点分布对离散系统特性的分析具有非常重要意义。通过对系统函数零极点的分析,可以分析离散系统以下几个方面的特性: ● 系统单位样值响应()h n 的时域特性; ● 离散系统的稳定性;
离散系统的频率特性; 1.1、零极点图的绘制 设离散系统的系统函数为 ()()() B z H z A z = 则系统的零极点可用MA TLAB 的多项式求根函数roots()来实现,调用格式为: p=roots(A) 其中A 为待根求多项式的系数构成的行矩阵,返回向量p 则是包含多项式所有根的列向量。如多项式为231()4 8 B z z z =+ + ,则求该多项式根的MA TLAB 命令为为: A=[1 3/4 1/8]; P=roots(A) 运行结果为: P = -0.5000 -0.2500 需注意的是,在求系统函数零极点时,系统函数可能有两种形式:一种是分子、分母多项式均按z 的降幂次序排列;另一种是分子、分母多项式均按1z -的升幂次序排列。这两种方式在构造多项式系数向量时稍有不同。 (1)()H z 按z 的降幂次序排列:系数向量一定要由多项式最高次幂开始,一直到常数项,缺项要用0补齐;如 3 4 3 2 2()3221 z z H z z z z z += ++++ 其分子、分母多项式系数向量分别为A=[1 0 2 0]、B=[1 3 2 2 1]。 (2)()H z 按1z -的升幂次序排列:分子和分母多项式系数向量的维数一定要相同,不足的要用0补齐,否则0z =的零点或极点就可能被漏掉。如 1 1 2 12()11124 z H z z z ---+= + + 其分子、分母多项式系数向量分别为A=[1 2 0]、B=[1 1/2 1/4]。 用roots()求得()H z 的零极点后,就可以用plot()函数绘制出系统的零极点图。下面是求系统零极点,并绘制其零极点图的MA TLAB 实用函数ljdt(),同时还绘制出了单位圆。 function ljdt(A,B) % The function to draw the pole-zero diagram for discrete system p=roots(A); %求系统极点 q=roots(B); %求系统零点 p=p'; %将极点列向量转置为行向量
西华大学实验报告(理工类) 开课学院及实验室: 实验时间 : 年 月 日 一、实验目的 1)初步掌握电力系统物理模拟实验的基本方法。 2)加深理解功率极限的概念,在实验中体会各种提高功率极限措施的作用。 3)通过对实验中各种现象的观察,结合所学的理论知识,培养理论结合实际及分析问题的能力。 二、实验原理 所谓简单电力系统,一般是指发电机通过变压器、输电线路与无限大容量母线联接而且不计各元件的电阻和导纳的输电系统。 对于简单系统,如发电机至系统d 轴和g 轴总电抗分别为d X ∑和q X ∑,则发电机的功率特性为 当发电机装有励磁调节器时,发电机电势q E 随运行情况而变化,根据一般励磁调节器的性能,可认为保持发电机'q E (或' E )恒定。这时发电机的功率特性可表示成 或 这时功率极限为 随着电力系统的发展和扩大,电力系统的稳定性问题更加突出,而提高电力系统稳定性和输送能力的最重要手段之一,就是尽可能提高电力系统的功率极限。从简单电力系统功率极限的表达式看,要提高功率极限,可以通过发电机装设性能良好的励磁调节器,以提高发电机电势、增加并联运行线路回路数;或通过串联电容补偿等手段,以减少系统电抗,使受端系统维持较高的运行电压水平;或输电线采用中继同步调相机、中继电力系统等手段以稳定系统中继点电压。 (3)实验内容 1)无调节励磁时,功率特性和功率极隈的测定 ①网络结构变化对系统静态稳定的影响(改变戈): 在相同的运行条件下(即系统电压U-、发电机电势E 。保持不变.罚芳赆裁Ll=E 。),分别 测定输电线单回线和双回线运行时,发电机的功一角特性曲线,&豆甍辜授冁蝮和达到功率极 限时的功角值。同时观察并记录系统中其他运行参数(如发电极端毫玉萼蔫交化。将两种 情况下的结果加以比较和分析。 实验步骤如下: a)输电线路为单回线; b)发电机与系统并列后,调节发电机,使其输出的有功和无ZZ 蔓专零: c)功率角指示器调零; d)逐步增加发电机输出的有功功率,而发电机不调节震磁: e)观察并记录系统中运行参数的变化,填入表1.3中: f)输电线路为双回线,重复上述步骤,将运行参数填入表l 。毒=:
广东技术师范学院实验报告 实验 (三) 项目名称:利用MATLAB 分析连续系统及离散系统的复频域特性 一.实验目的 1.掌握 Laplace 变换的意义、基本性质及应用。 2.掌握拉普拉斯变换的三维可视化表示。 3.理解系统函数的零、极点分布(极、零图)决定系统时间原函数的特性。 4.掌握系统冲激响应。 5. H (z )部分分式展开的MA TLAB 实现 6. H (z )的零极点与系统特性的MATLAB 计算 二.实验原理 1.Laplace 变换和逆变换定义为 ??∞+∞-∞ -==j j st st ds e s F j t f dt e t f s F σσπ)(21)()()(0 ( 4 – 1 ) 在 Matlab 中实现 Laplace 变换有两个途径:直接调用指令 laplace 和ilaplace 进行; 根据定义式 ( 4 – 1 ),利用积分指令 int 实现。相较而言,直接利用 laplace 和 ilaplace 指令实现机器变换要简洁一些。 调用格式: L=laplace(F) F=ilaplace(L) 2.实现拉普拉斯曲面图及其可视化的步骤如下: a .定义两个向量x 和y 来确定绘制曲面图的复平面横座标和纵座标的范围。 b .调用meshgrid 函数产生包含绘制曲面图的s 平面区域所有等间隔取样点的复矩阵。 c .计算复矩阵s 定义的各样点处信号拉氏变换F(s)的函数值,并调用abs 函数求其模。 d .调用mesh 函数绘出其幅度曲面图。 3.在连续系统的复频域分析中,系统函数起着十分重要的作用,它包含了连续系统的固有特性。通过系统函数可以对系统的稳定性、时域特性、系统频率响应等系统特性进行分析。 若连续系统的系统函数的零极点已知,系统函数便可确定下来,即系统函数H (s )的零极点分布完全决定了系统的特性。系统函数的零点和极点位置可以用matlab 的多项式求根函数roots()来求得。用roots()函数求得系统函数H(s)的零极点后,就可以用plot 命令在复平面上绘制出系统函数的零极点图。
实验6 离散时间系统的z 域分析 一、实验目的 1.掌握z 变换及其反变换的定义,并掌握MATLAB 实现方法。 2.学习和掌握离散时间系统系统函数的定义及z 域分析方法。 3.掌握系统零极点的定义,加深理解系统零极点分布与系统特性的关系。 二、实验原理 1. Z 变换 序列x(n)的z 变换定义为 ()()n n X z x n z +∞ -=-∞ = ∑ Z 反变换定义为 1 1 ()()2n r x n X z z dz j π-= ? 在MATLAB 中,可以采用符号数学工具箱的ztrans 函数和iztrans 函数计算z 变换和z 反变换: Z=ztrans(F) 求符号表达式F 的z 变换。 F=ilaplace(Z) 求符号表达式Z 的z 反变换。 2.离散时间系统的系统函数 离散时间系统的系统函数H(z)定义为单位抽样响应h(n)的z 变换 ()()n n H z h n z +∞ -=-∞ = ∑ 此外,连续时间系统的系统函数还可以由系统输入和输出信号的z 变换之比得到 ()()/()H z Y z X z =
由上式描述的离散时间系统的系统函数可以表示为 101101()M M N N b b z b z H z a a z a z ----+++= +++…… 3.离散时间系统的零极点分析 离散时间系统的零点和极点分别指使系统函数分子多项式和分母多项式为零的点。在MATLAB 中可以通过函数roots 来求系统函数分子多项式和分母多项式的根,从而得到系统的零极点。 此外,还可以利用MATLAB 的zplane 函数来求解和绘制离散系统的零极点分布图,zplane 函数调用格式为: zplane(b,a) b,a 为系统函数的分子、分母多项式的系数向量(行向量)。 zplane(z,p) z,p 为零极点序列(列向量)。 系统函数是描述系统的重要物理量,研究系统函数的零极点分布不仅可以了解系统单位抽样响应的变化,还可以了解系统的频率特性响应以及判断系统的稳定性: ①系统函数的极点位置决定了系统单位抽样响应h(n)的波形,系统函数零点位置只影响冲激响应的幅度和相位,不影响波形。 ②系统的频率响应取决于系统的零极点,根据系统的零极点分布情况,可以通过向量分析系统的频率响应。 ③因果的离散时间系统稳定的充要条件是H(z)的全部极点都位于单位圆内。 三、实验内容 (1)已知因果离散时间系统的系统函数分别为: ①23221()0.50.0050.3 z z H z z z z ++=--+
管理信息系统实验报告 实验3 系统分析 课程名称:管理信息系统 指导教师:王玮 班级:信管1401 学号: 姓名:唐赛赛 时间: 2016.04.06 地点: 3 号机房
一、实验目的 1.了解开发Visio解决方案的基本概念和关于Visio工具的一些基本的操作和应用; 2.掌握系统分析阶段数据流程图的画法; 二、实验步骤和实验结果: 使用Visio中提供的“组织结构图”模具,绘制下面例题的组织结构图,附在图后。 2、使用Visio绘制“业务流程图模具”和“数据流程图模具”(1)创建“业务流程图模具” 先在“框图”-〉“基本形状”中找到圆角矩形,右击选择“添加到我的形状”-〉“添加到新模具”。之后出现“另存为”对话框,把新模具命名为“业务流程图”,把圆角矩形形添加到了新模具“业务程图”中。用同样的思路,先在“框图”-〉“基本形状”中找到圆形,右击选择“添加到我的形状”-〉“添加到模具“业务程图”中;在“框图”-〉“基本形状”找到矩形,在“流程图”中的“IDEFO图表形状”找到动态连接线,在“流程图”中的“SDL图表形状”中找到文档,多文档,添加到模具“业务程图”中。可以通过设置“动态连接线”属性来改变其形状。如下图:
添加完成后,我们就可以在画业务流程图时打开该模具,业务流程图所有的元素都会在一个模具中显示出来。(2)创建“数据流程图模具”先在“框图”-〉“基本形状”中找到圆形(或是“流程图”中的“混合流程图形状”中找到外部实体2 ),右击选择“添加到我的形状”-〉“添加到新模具”(注,使用外部实体2来表示外部实体的时候,请将之旋转180度使用)。之后出现“另存为”对话框,把新模具命名为“数据流程图”,这样我们就把圆形形添加
实验5 连续时间系统的复频域分析 一、实验目的 1.掌握拉普拉斯变换及其反变换的定义,并掌握MATLAB 实现方法。 2.学习和掌握连续时间系统系统函数的定义及复频域分析方法。 3.掌握系统零极点的定义,加深理解系统零极点分布与系统特性的关系。 二、实验原理与方法 1.拉普拉斯变换 连续时间信号)(t x 的拉普拉斯变换定义为 )1.....(..........)()(dt e t x s X st ? +∞ ∞ --= 拉普拉斯反变换定义为 )2....(..........)(21)(ds e s X j t x j j st ?∞ +∞ -=σσπ 在MATLAB 中,可以采用符号数学工具箱的laplace 函数和ilaplace 函数进行拉氏变换和反拉氏变换。 L=laplace(F)符号表达式F 的拉氏变换,F 中时间变量为t ,返回变量为s 的结果表达式。 L=laplace(F,t)用t 替换结果中的变量s 。 F=ilaplace(L)以s 为变量的符号表达式L 的拉氏反变换,返回时间变量为t 的结果表达式。 F=ilaplace(L,x)用x 替换结果中的变量t 。 除了上述ilaplace 函数,还可以采用部分分式法,求解拉普拉斯逆变换,具体原理如下: 当 X (s )为有理分式时,它可以表示为两个多项式之比: )3.(..........)()()(0 110 11a s a s a b s b s b s D s N s X N N N N M M M M +?+++?++==---- 式(3)可以用部分分式法展成一下形式 )4.....(.............)(2211N N p s r p s r p s r s X -++-+-= 通过查常用拉普拉斯变换对,可以由式(1-2)求得拉普拉斯逆变换。 利用 MATLAB 的residue 函数可以将 X (s )展成式(1-2)所示的部分分式展开式,该 函数的调用格式为:[r,p,k] = residue(b,a) 其中b 、a 为分子和分母多项式系数向量,r 、p 、k 分别为上述展开式中的部分分式系数、极点和直项多项式系数。 2.连续时间系统的系统函数
实验六 离散线性时不变系统分析 一、 实验目的 1. 掌握离散LSI 系统的单位序列响应、单位阶跃响应和任意激励下响应的MATLAB 求解方法。 2. 掌握离散LSI 系统的频域分析方法; 3. 掌握离散LSI 系统的复频域分析方法; 4. 掌握离散LSI 系统的零极点分布与系统特性的关系。 二、实验原理及方法 1. 离散LSI 系统的时域分析 描述一个N 阶线性时不变离散时间系统的数学模型是线性常系统差分方程,N 阶LSI 离散系统的差分方程一般形式为 ) ()(0 i n x b k n y a M i i N k k -=-∑∑== (6.1) 也可用系统函数来表示 12001212120 () ()()() ()1M i M i i M N N k N k k b z b b z b z b z Y z b z H z X z a z a z a z a z a z ----=----=++++== == ++++∑∑ (6.2) 系统函数()H z 反映了系统响应和激励间的关系。一旦上式中k a ,i b 的数据确定了,系统的性质也就确定了。特别注意0a 必须进行归一化处理,即01a =。 对于复杂信号激励下的线性系统,可以将激励信号在时域中分解为单位序列或单位阶跃序列的线性叠加,把这些单元激励信号分别加于系统求其响应,然后把这些响应叠加,即可得到复杂信号作用于系统的零状态响应。因此,求解系统的单位序列响应和单位阶跃响应尤为重要。由图6-1可以看出一个离散LSI 系统响应与激励的关系。 () h n ()H z ()x n ()X z ()()() Y z X z H z =()()*() y n x n h n = 图6-1 离散LSI 系统响应与激励的关系 (1) 单位序列响应(单位响应) 单位响应()h n 是指离散LSI 系统在单位序列()n δ激励下的零状态响应,因此()h n 满足线性常系数差分方程(6.1)及零初始状态,即 ()() N M k i k i a h n k b n i δ==-=-∑∑, (1)(2)0h h -=-== (6.3) 按照定义,它也可表示为 ()()()h n h n n δ=* (6.4) 对于离散LSI 系统,若其输入信号为()x n ,单位响应为()h n ,则其零状态响应() zs y n
天津职业技术师范大学课程设计大学学籍管理系统的设计与开发 专业:软件工程 班级学号:软件1002-17 学生姓名:靳利强 指导教师:龚良波老师 二〇一三年七月
一.需求分析 1.课程名称:大学教务信息系统的设计与开发 2.设计目的: 为方便学校做好学生学籍管理工作,设计一个学生学籍管理系统,在设计过程中作了系统分析和总体设计,软件设计采取模块化的设计思路。 3.需求概述 该学生学籍管理系统主要对学生学籍信息、成绩信息进行管理,提供一个平台,供学籍管理人员增删改查学生信息、学生成绩信息。系统分为学生信息管理、学生成绩管理、信息查询等几个模块。学籍管理人员登录成功后可以对学生信息管理、学生成绩管理、信息查询等模块进行操作,如学生信息添加、修改、删除和查询;学生成绩登记、修改、删除和查询;查询信息等。 4功能需求: 1)功能齐全:界面操作灵活方便,设计包括以下基本功能: 2)学生信息管理、教师信息管理、财务信息管理、班级信息管理、课 程信息管理、成绩信息管理、打印信息管理、教室信息管理、综合信息查询、系统管理等,至少实现其中的三个功能,且每个功能至少包括两个子功能。 3)按照软件工程的要求进行分析、设计和开发。 4)界面友好:界面友好、输入有提示、尽量展示人性化。 5)可读性强:源程序代码清晰、有层次、主要程序段有注释。
6)健壮性好:用户输入非法数据时,系统应及时给出警告信息。 二.概要设计 1.功能模块: 2数据流图: (1)学生端
(2)管理员端
学生端功能: A 登录,学生登录后,验证成功,进入其信息展示页。 管理员端功能: B 登录,管理员登录后,验证成功,进入学生信息列表,可以对学生信息进行修改,删除,按班级查询,按学号查询,按名字查询。上传图片,更新图片等操作。 三.详细设计及实现 数据库设计: 学生表: 教师表:
∞ 实验三 连续和离散系统的复频域分析 一、实验目的 1.掌握连续时间函数的拉普拉斯正变换及反变换; 2.掌握离散时间函数的 Z 变换和 Z 反变换;; 3.掌握连续系统复频域分析方法; 4.掌握离散系统复频域分析方法。 二、实验仪器 装有 MATLAB 软件的微型计算机 1 台 三、实验原理 3.1 拉氏变换的正变换和逆变换 (1)定义 正变换: F (s ) = ? f (t )e -st dt 反变换: f (t ) = 1 ? σ + j ∞ F (s )e st ds -∞ 2πj ο - j ∞ 其中 F(s) 可以表示为有理分式 F (s ) = B (s ) 或零极点相乘形式 A (s ) F (s ) =k (s -z 1)(s -z 2)L (s -z m ) (s - p 1)(s - p 2)L (s - p n ) A(s)和 B(s)都是 s 的多项式,z 1,z 2,…,z m 是 F(s)的零点,p 1,p 2,…,p n 是 F(s)的极点, k 为 F(s)的增益。 (2)拉氏变换的函数调用 正变换: Fs = laplace(f) 逆变换:f = ilaplace(Fs)
□? 3.2 Z 变换的正变换和逆变换 (1)定义 正变换: F (z) = ∑ f (n)z -n n =0 反变换: f (n) = 1 2π j c F (z)z n -1 dz 其中 F(z)可以表示为有理分式 F (z) = B(z) 或零极点相乘形式 A(z) F (z ) =k (z -z 1)(z -z 2)L (z -z m ) (z -p 1)(z -p 2)L (z -p n ) A(z)和 B(z)都是 z 的多项式,z 1,z 2,…,z m 是 F(z)的零点,p 1,p 2,…,p n 是 F(z)的极点, k 为 F(z)的增益。 (2)Z 变换的函数调用 正变换: F = ztrans(f) f = f (n ) ? F = F (z ) 逆变换: f = iztrans (F) F = F (z ) ? f = f (n ) 3.3 复频域分析其他相关函数 (1) ezplot 函数 调用格斯:ezplot(f) 功能:符号型函数的绘图函数 (2) dimpulse 函数 调用格式:dimpulse(B,A[,N]) 功能:绘制传递函数 H(Z)的单位脉冲响应,其中 B ,A 分别是传递函数按 Z-1 的升幂排列的分子分母系数行向量,N 为指定的单位脉冲响应序列的点数。 (3) dstep 函数 ∞
实验八系统的复频域 分析
一、实验目的 1、掌握系统的复频域分析方法。 2、掌握测试系统的频率响应的方法。 二、预习内容 1、系统频响的方法。(见第四章波特图的介绍) 三、实验原理 1. N 阶系统系统的传递函数 用微分方程描述的N 阶系统为: 根据零状态响应(起始状态为零),则对其进行拉氏变换有: 则系统传递函数可表达为: 用差分方程描述的N 阶系统为: 根据零状态响应(起始状态为零),则对其进行拉氏变换有: 则系统传递函数可表达为: 2.根据系统传递函数的零极点图分析系统 零点:传递函数分子多项式的根。 极点:传递函数分母多项式的根。 根据零极点图的不同分布分析系统。 3.涉及到的Matlab 函数 (1)freqz 函数:实验六中出现过,可用来求单位圆上的有理z 变换的值。调用格式:同实验六 (2)zplane 函数:得到有理z 变换的零极点图。 调用格式:zplane(num,den)
其中,num和 den是按z ?1 的升幂排列的、z 变换分子分母多项式系数的行向量。 (3)roots 函数:求多项式的根。 调用格式:r=roots(c), c 为多项式系数向量;r 为根向量。 四、实验内容 1.系统零极点的求解 (1)求解系统和的零极点,验 证下面程序的运行结果,根据系统零极点图分析系统性质。 b=[1,0,-1]; a=[1,2,3,2]; zr=roots(b); pr=roots(a); plot(real(zr),imag(zr),'go',real(pr),imag(pr),'mx','markersize',12,'linewidth',2); grid; legend('零点','极点'); figure; zplane(b,a); (2)参考上述程序,绘制系统和 的零极点图,并分析系统性质。与用zplane 函数直接绘制系统零极点图(注:圆心的圆圈并非系统的零点)做比较。
信号与系统实验报告 实验名:离散时间信号与系统的频域分析 实验六离散时间系统的时域分析 一、实验目的 1、掌握离散时间信号与系统的频域分析方法,从频域的角度对信号与系统的特性进行分析。 2、掌握离散时间信号傅里叶变换与傅里叶逆变换的实现方法。 3、掌握离散时间傅里叶变换的特点及应用 4、掌握离散时间傅里叶变换的数值计算方法及绘制信号频谱的方法 二、预习内容 1、离散时间信号的傅里叶变换与逆变换。 2、离散时间信号频谱的物理含义。 3、离散时间系统的频率特性。 4、离散时间系统的频域分析方法。 三、实验原理 1. 离散时间系统的频率特性
2. 离散时间信号傅里叶变换的数值计算方法 3.涉及到的Matlab 函数
四、实验内容 1、离散时间系统的时域分析 1 离散时间傅里叶变换 (1)下面参考程序是如下序列在范围?4π≤ω≤ 4π的离散时间傅里叶变换 %计算离散时间傅里叶变换的频率样本 clear all; w=-4*pi:8*pi/511:4*pi; num=[2 1]; den=[1 -0.6]; h=freqz(num,den,w); subplot(2,1,1)
plot(w/pi,real(h)); grid; title(‘实部’) xlabel(‘omega/\pi’); yl abel(‘振幅’); subplot(2,1,2) plot(w/pi, imag(h)); grid; title(‘虚部’) xlabel(‘omega/\pi’); ylabel(‘振幅’); figure; subplot(2,1,1) plot(w/pi, abs(h)); grid; title(‘幅度谱’) xlabel(‘omega/\pi’); ylabel(‘振幅’); subplot(2,1,2) plot(w/pi, angle (h)); grid; title(‘相位谱’) x label(‘omega/\pi’); ylabel(‘以弧度为单位的相位’);
本科实验报告 课程名称:系统分析与设计 实验项目:《》实验实验地点: 专业班级:学号: 学生姓名: 指导教师: 2016年11月日
一、实验目的 通过《系统分析与设计》实验,使学生在实际的案例中完成系统分析与系统设计中的主要步骤,并熟悉信息系统开发的有关应用软件,加深对信息系统分析与设计课程基础理论、基本知识的理解,提高分析和解决实际问题的能力,使学生在实践中熟悉信息系统分析与设计的规范,为后继的学习打下良好的基础。 二、实验要求 学生以个人为单位完成,自选题目,班内题目不重复,使用UML进行系统分析与设计,并完成实验报告。实验报告(A4纸+电子版)在最后一次上课时提交(10周)。 三、实验主要设备:台式或笔记本计算机 四、实验内容 1 选题及项目背景 学生填写自选题目 2 定义 学生填写(对自选项目系统进行描述200-400字) 3 参考资料 学生填写 4 系统分析与设计 4.1需求分析 4.1.1识别参与者 学生填写 4.1.2 对需求进行捕获与描述 学生填写时删除以下括号内容 (内容要求1:对每个用例进行概要说明,参考以下格式: 用例名称:删除借阅者信息执行者:管理员 目的:完成一次删除借阅者信息的完整过程。) (内容要求2:选择其中一个用例(如下订单)给出其用例描述。格式参考下表
) 4.1.3 用例图 通过已掌握的需求,初步了解系统所要完成的功能。下面给出用例图。 4.1.4 分析与讨论 1)建模用例图的步骤、方法? 2)如何识别系统的参与者?应该如何划分用例,应注意哪些问题? 3)心得 4.2 建立对象模型 4.2.1 候选类的数据字典 学生填写 4.2.2定义类 (内容以“书籍信息”类为例列出该类的属性和操作如下: “书籍信息”类 ?属性 国际标准书号(ISBN):文本(String) 书名(name):文本
实验四:连续系统的复频域分析 一、实验目的: 1、掌握连续与离散时间系统的正反复频域与Z域变换 2、掌握利用MATLAB进行零极点分析,进一步了解零极点对整个系统的影响 3、掌握simulink环境下系统建模与仿真以及系统求解。 二、实验内容: 1、已知某连续系统的系统函数为: (1)利用[r, p, k]=residue(num, den),求H(s)的极零点以及多项式系数; (2)画出系统的零极点分布图,判断系统得稳定性。 (3)求h(t),判断系统得稳定性。 2、已知某离散系统的系统函数为:, (1)利用[r, p, k]=residuez(num, den)求H(z)的极零点以及多项式系数; (2)画出零极点分布图,判断系统得稳定性。 (3)求单位函数响应用impz(b, a),判断系统是否稳定; 3、已知线性时不变微分方程 在Simulink环境下搭建起系统的仿真模型,并查看仿真结果曲线。(1)写出传递函数H(s),绘出系统模拟框图; (2)当f(t)分别为,,的零状态响应;且当与课本P81的结果进行比较(3)方程的初值为, ,求全响应; 4、已知某信号,n(t)为正态噪声干扰且服从N(0,0.22)分布,对此信号进行采样,采样间隔为0.001s,之后对此信号进行Botterworth低通滤波,从信号中过滤10HZ的输出信号,试对系统进行建模与仿真。 三、实验数据处理与结果分析: 第一题:题1_1:
>> num=[2,5]; den=[1,1,3,2]; [r,p,k]=residue(num,den) r = -0.5750 - 0.7979i -0.5750 + 0.7979i 1.1499 p =-0.1424 + 1.6661i -0.1424 - 1.6661i -0.7152 k =[]
实验6 离散时间系统的z 域分析 (综合型实验) 一、实验目的 1) 掌握z 变换及其反变换的定义,并掌握MATLAB 实现方法。 2) 学习和掌握离散时间系统系统函数的定义及z 域分析方法。 3) 掌握系统零极点的定义,加深理解系统零极点分布与系统特性的关系。 二、实验原理与方法 1. z 变换 序列(n)x 的z 变换定义为(z)(n)z n n X x +∞ -=-∞ = ∑ (1) Z 反变换定义为11(n)(z)z 2n r x X dz j π-= ? (2) MATLAB 中可采用符号数学工具箱ztrans 函数和iztrans 函数计算z 变换和z 反变换: Z=ztrans(F)求符号表达式F 的z 变换。 F=iztrans(Z)求符号表达式Z 的z 反变换 2. 离散时间系统的系统函数 离散时间系统的系统函数H(z)定义为单位抽样响应h(n)的z 变换 (z)(n)z n n H h +∞ -=-∞ = ∑ (3) 此外连续时间系统的系统函数还可由系统输入与输出信号z 变换之比得到 (z)(z)/X(z)H Y = (4) 由(4)式描述的离散时间系统的系统时间函数可以表示为 101101...(z)...M M N N b b z b z H a a z a z ----+++=+++ (5) 3. 离散时间系统的零极点分析 MATLAB 中可采用roots 来求系统函数分子多项式和分母多项式的根,从而得到系统的零极点。 此外还可采用MATLAB 中zplane 函数来求解和绘制离散系统的零极点分布图,zplane 函数的调用格式为: zplane(b,a) b 、a 为系统函数分子分母多项式的系数向量(行向量) zplane(z,p) z 、p 为零极点序列(列向量) 系统函数是描述系统的重要物理量,研究系统函数的零极点分布不仅可以了解系统单位抽样响应的变化,还可以了解系统频率特性响应以及判断系统的稳定性; 系统函数的极点位置决定了系统的单位抽样响应的波形,系统函数零点位置只影响冲激响应的幅度和相位,不影响波形。 系统的频率响应取决于系统函数的零极点,根据系统的零极点分布情况,可以通过向量法分析系统的频率响应。
《管理信息系统》 实验二 题目:系统分析 专业:信息管理与信息系统 班级:1106班 姓名 ************************* 指导教师:贺玉珍老师 完成日期:2014.4.28
运城学院超市管理系统设计分析说明书 一、系统目标:随着小超市规模的发展不断扩大,商品数量急剧增加,有关商品的各种信息量也成倍增长。超市时时刻刻都需要对商品各种信息进行统计分析。而大型的超市管理系统功能过于强大而造成操作繁琐降低了小超市的工作效率。 超市管理系统是市场上最流行的超市上常用的系统之一,它主要包含以下几个模块:系统权限的设定、原始数据录入、数据的汇总及查询等。从而,实现对进货、销售及员工信息等实现全面、动态、及时的管理。 本文系统的分析了软件开发的背景以过程;首先介绍了软件的开发环境,其次介绍了本软件的详细设计过程:数据库的设计、各个模块的设计和实现,以及具体界面的设计和功能。 二、系统的初步调查 通过实地参观和学习,对超市的整体情况进行调研。了解超市的组织机构划分,充分了解超市进销存的流程的整体情况,对开发新系统的态度等。通过召开座谈会和个人访谈方法了解各个部门的主要职能及具体运作方式、过程等。 进行初步调研的具体内容为: (1)员工的规模:大约有多少员工,有多少是稳定的,有多少是浮动的; (2)员工管理人员的数量; (3)超市的商品销售状况 (4)客户编码方式; 三、可行性分析: 1.技术可行性研究,在IT行业中从业的工作人员一般都要求掌握计算机技术,具有一定的软硬件基础,会使用各种管理软件,熟悉IT产品。因为,有的超市对员工的素质要求比较高,从管理层到下面的销售人员,都要求具有一定的计算机基础,所以在新系统投入使用时,只要对员工进行少量的培训,系统的功能和使用方法就基本上能够是系统顺利运行。 2经济可行性研究,因为通过网络传递销售信息可以不受距离的限制,因此可以借阅许多的人力和物力,方便管理,由此可以减少不必要的开支,同时该系统可以提高超市的销售效率,即提高了超市的经济效益,所以从经济上完全是可行的,(1)超市有能力承担系统开发费用,(2)新系统将为企业带来经济效益3操作可行性研究,本系统采用基于Windows的图形用户界面,而该系统是大家熟悉的操作系统,对于那些有一般的计算机知识的人员就可以轻松上手。而整个超市管理系统采用最友好的交互界面,简介明了,不需要对数据库进行深入的
一,实验目的 理解关于z变换及其反变换的定义和MATLAB实现,理解系统零极点分布与系统特性的关系。 二,实验原理 1.z变换 z变换调用函数Z=ztrans(F) z反变换调用函数F=ilaplace(Z) 2.离散时间系统的系统函数 3.离散时间系统的零极点分析 可以通过调用函数zplane: zplane(b,a):b、a为系统函数的分子、分母多项式的系数向量。 zplane(z,p):z、p为零极点序列。 三,实验内容 (1)已知因果离散时间能系统的系统函数分别为: ①H z=z 2+2z+1 z?0.5z?0.005z+0.3 ②H z=z 2+2z+1 3z+3z?z+3z?1 试采用MATLAB画出其零极点分布图,求解系统的冲击响应h(n)和频率响应H(e jΩ),并判断系统是否稳定。 ①H z=z 2+2z+1 z3?0.5z2?0.005z+0.3 MATLAB程序如下: b=[1 2 1] a=[1 -0.5 -0.005 0.3] subplot(131) zplane(b,a) subplot(132) impz(b,a,0:10) subplot(133) [H,w]=freqz(b,a) plot(w/pi,H) 程序执行结果如下:
由程序执行结果,当t趋于无穷,响应趋于0,所以该系统是稳定系统。 ②H z=z 2+2z+1 3z4+3z3?z3+3z?1 MATLAB程序如下: b=[1] a=[1 -1.2*2^(1/2) 1.44] subplot(131) zplane(b,a) subplot(132) impz(b,a,0:10) subplot(133) [H,w]=freqz(b,a) plot(w/pi,H) 程序执行结果如下:
实验报告 课程:管理信息系统 一、实验目的 验证有关概念和理论,加深对概念和知识的理解和认识;熟悉和掌握Visual Basic 6.0 软件的使用方法;初步具备信息管理知识和制作数据字典、系统数据流程图的能力。运用课程讲授的管理信息系统的系统分析方法、模块化系统设计方法以及系统的调试方法进行人事档案管理信息系统的分析、设计、开发、实现与调试。 二、实验方法 面向对象法 三、实验环境及开发工具 1.硬件环境 在最低配置的情况下,系统的性能往往不尽如人意,但现在的硬件性能已经相当的出色,而且价格便宜,因此通常给服务器的配置高性能的硬件。 处理器:Interl Pentium II 266 MX 或更高 内存:64M 硬盘空间:2 GB 显卡:SVGA 显示适配器 显示器:液晶17寸 2.软件环境 操作系统:Windows/98/ME/2000/XP或更高版本 数据库:Microsoft Access 2000 3.实验开发工具:Visual Bisic 6.0程序系统 四、实验内容
(一)、系统分析 1、系统数据流程图 2、数据字典 3、系统中所有实体(包括实体的属性)以及实体之间的联系类型分析 人员的个人资料经过专业的处理部门的处理形成个人档案。档案包括自然情况,工作情况,简历,政治情况等各方面信息,内容比较庞大复杂。将档案信息传送到人员信息库。同时还综合考虑档案管理工作的性质,总结归纳出所需实现
的功能。为人事档案进行服务,对人事的变动、人事资料、以及人事资料的查询,统计等功能。总体上说具有编辑,查询,用户管理,图表统计等功能。然后将最终结果提交到人力资源管理部门,由人力资源管理人员进行审查,以便于对职工的调配。 4、典型处理的表达 档案完整添加用户档案到档案库 个人信息成功添加到档案库 修改用户档案信息 失败退回用户档案 退回用户档案 (二)、系统设计 1、子系统划分(或功能划分或模块划分) 功能划分 1、用户管理 功能:设置使用人事管理系统的用户及其使用权限。整个人事管理系统由多个功能模块组成,不同的模块完成不同的功能,所以可以为不同的职工分配不同的功能,使其具有不同的权限,完成其权限所对应的功能,从而很好地管理好整个系统。 2、辅助表管理 功能:通过它的这个功能可以有效的对本单位人事部门的扩充进行及时的计算机管理。只要管理员进行简单的数据字段添加即可。辅助表管理功能是高级管理员及中级管理员拥有的权限,它的功能是对数据库进行新表的添加。 3、档案编辑 功能:档案编辑模块中有4个子模块。他们是档案卡片、个人简历、家庭成员、历史档案等功能。这些功能因管理员的权限不同所表示出的功能使用也不同,普通管理员没有数据修改及删除的权利。在这些功能里详细的记录了所有单位员工的资料。 4、档案查询 功能:对档案卡片的查询功能,在这里可以查到符合程序要求的任何信息。
信号与系统 实验报告 实验五连续系统的复频域分析 实验五连续系统的复频域分析 一、实验目的 1. 深刻理解拉普拉斯变换、逆变换的定义,掌握用MATLAB实现拉普拉斯变换、逆变换的方法。 2会求几种基本信号的拉氏变换。 3 掌握用MATLAB绘制连续系统零、极点的方法。 4 求解系统函数H(s)。 二
1已知连续时间信号f(t)=sin(t)u(t)、求出该信号的拉普拉斯变换,并用MATLAB 绘制拉普拉斯变换的曲面图。 syms t; ft=sin(t)*heaviside(t); Fs=Laplace(ft); a=-0.5:0.08:0.5; b=-2:0.08:2; [a,b]=meshgrid(a,b); c=a+i*b; d=ones(size(a)); c=c.*c; c=c+d; c=1./c; c=abs(c); mesh(a,b,c); surf(a,b,c) axis([-0.5,0.5,-2,2,0,10]) colormap(hsv
) 2求[(1-e^(-at))]/t的拉氏变换。 syms t s a f1=(1-exp(-a*t))/t; F=laplace(f1,t,s) F = log(s+a)-log(s) 3求F(s)=-log(s)+ log(s+a)的拉氏逆变换syms t s a F =log(s+a)-log(s); f1=ilaplace(F,s,t) f1 = (1-exp(-a*t))/t
4已知某连续系统的系统函数为: H(s)=(s^2+3s+2)/(8s^4+2s^3+3s^2+5)试用MATLAB求出该系统的零极点,画出零极点分布图。 b=[1 3 2]; a=[8 2 3 0 5]; zs=roots(b); ps=roots(a); hold on plot(real(zs),imag(zs),'o'); plot(real(ps),imag(ps),'x'); grid axis([-2.5,1,-1,1]) 5已知H(s)=(s+1)/(s^2+s+1),绘制阶跃响应图形,冲激响应图形,频率激响应图形。 syms t s H=(s+1)/(s^2+s+1); f1=ilaplace(H,s,t); f2=heaviside(t);
实验六 离散控制系统Simulink 仿真与状态反馈控制器的设计 姓名: 学号: 一、实验题目 2.6.2 系统结构如指导书图2-6-31所示,其中T=0.2s ,用Simulink 仿真方法完成系统的单位阶跃响应试验。 2.6.1已知系统结构图如指导书图2-6-32所示,若采样周期T 由0.1至1s 范围内变化,用MATLAB 编程的方法,完成T 每增加0.3s ,系统的阶跃响应曲线的变化,分析采样周期对离散系统动态特性及稳定性的影响。 2.7.2已知一个单位反馈系统的开环传函为) 3)(2(10)(++=s s s s G ,试搭建Simulink 模型,仿真原系统的阶跃响应。再设计状态反馈控制器,配置系统的闭环极点在P1=-3,P2=-0.5+j ,P3=-0.5-j ,并用Simulink 模型进行仿真验证。 二、实验目的 掌握在Simulink 环境下以及在MTALAB 环境下,进行离散控制系统的建模、分析。观察采样周期对离散系统动态特性及稳定性的影响。学习设计状态反馈控制器,用状态反馈实现闭环极点的任意配置。 三、实验过程与结果 题2.6.2: 1、在Simulink 环境下,搭建如图1所示的模型: 图1 Simulink 环境下的采样系统建模 2、将零阶保持器的采样时间设为0.2,同时在Simulation-Configuration parameters 中把Type 选为Fixed-Step ,然后在Fixed-Step size 中输入对应的采样时间0.2。运行,观察系统单位阶跃响应。结果如图2:
图2 系统的单位阶跃响应 题2.6.1: 1、在MA TLAB环境下,在m文件中编写如下程序: n=[1];d=[1 1 0];g=tf(n,d); %求连续系统开环传函 Ti=[0.1 0.4 0.7 1]; %设置不同的采样周期 for i=1:length(Ti) T=Ti(i); g0=c2d(g,T,'zoh'); %求加入零阶保持器后开环传函 gb=feedback(g0,1); %系统闭环传函 [num,den]=tfdata(gb,'v'); %得到闭环传函的分子、分母 abs(roots(den)) %求闭环特征根,判稳 dstep(num,den) %画离散系统的单位阶跃响应曲线 hold on;grid on; %在同一张图上绘制 end legend('T=0.1','T=0.4','T=0.7','T=1') 2、运行程序,得到系统闭环特征根,以及不同采样周期时系统的单位阶跃响应曲线,结果如图3: ans = 0.9537 0.9537 ans = 0.8555 0.8555 ans = 0.8077 0.8077