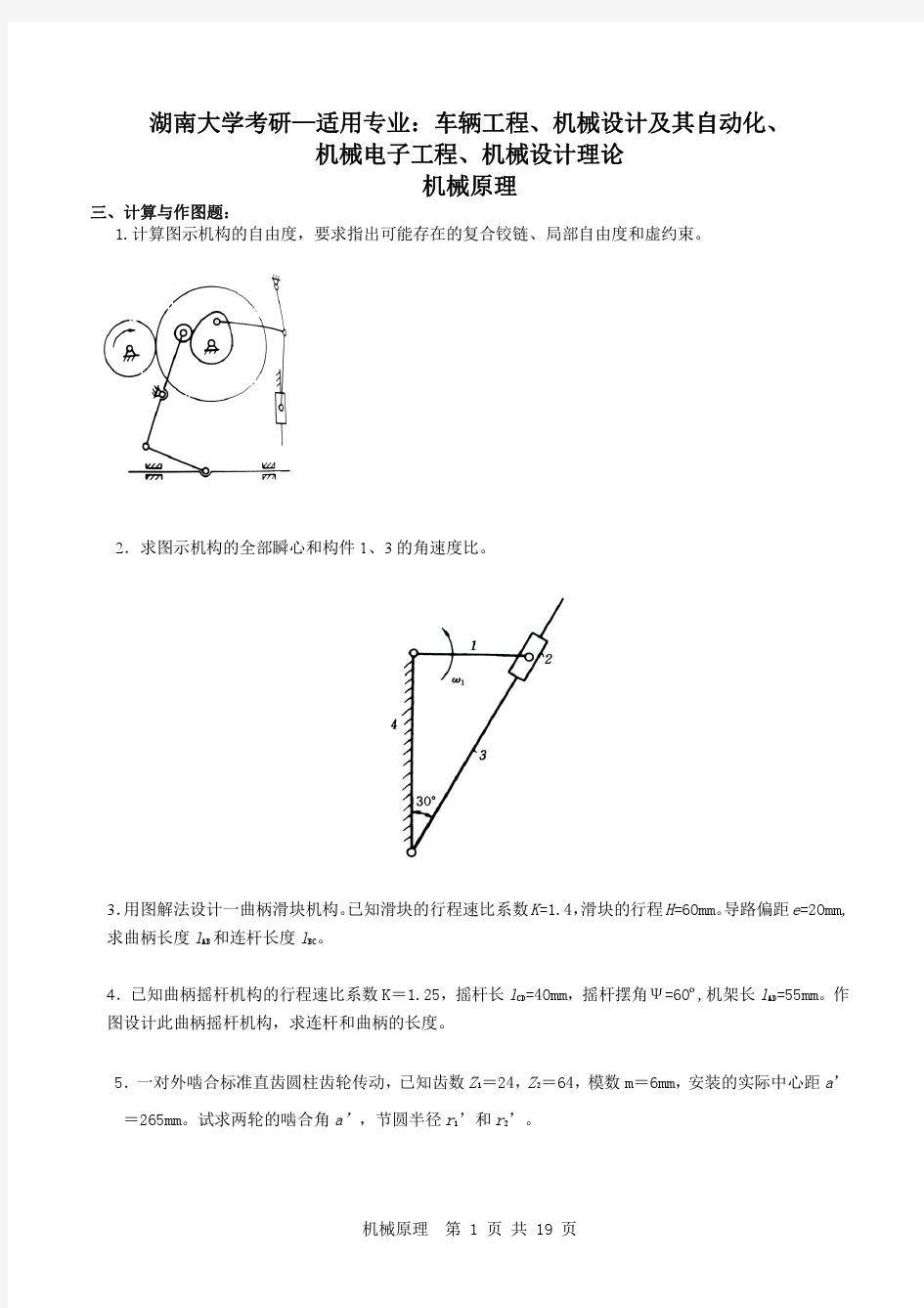
1. 渐开线直齿圆柱外齿轮顶圆压力角(大于、等于、小于)分度圆压力角。 2. 一对渐开线齿轮啮合传动时,其中心距安装若有误差,(传动比的变化)。 3. 齿轮的渐开线形状取决于它的直径。 4.一对渐开线直齿圆柱齿轮传动时,如重合度等于1,这时实际啮合线的长度等于。 5.一对渐开线直齿圆柱齿轮的啮合线切于。 6.用标准齿条刀具加工渐开线标准直齿圆柱外齿轮时,刀具的中线与齿轮的分度圆。 7.一对渐开线齿轮啮合传动时,加大安装中心距,啮合角__ ____ 。 8.渐开线齿轮的基圆齿距__ ____法向齿距。 10. 一对能正确啮合传动的渐开线直齿圆柱齿轮必须满足。 11. 斜直线齿廓的齿条在不同齿高处的模数和压力角,随齿高的增加而。 12. 一对渐开线斜齿圆柱齿轮在啮合过程中齿廓上的接触线长度是变化的。 13. 一对能正确啮合传动的渐开线标准直齿圆柱齿轮,其啮合角 14. 齿数、模数分别对应相同的一对渐开线直齿圆柱齿轮传动和一对斜齿圆柱齿轮传动,后者的重合度比前者。 15. 渐开线标准齿轮的齿根圆与基圆大小关系。 16.平行轴斜齿圆柱齿轮机构的几何尺寸在计算,基本参数的标准值规定在。 17.机械平衡研究的内容是惯性力间的平衡; 18. 运动副元素材料一定时,当量摩擦系数取决于运动副元素的几何形状。 19. 渐开线齿廓啮合特点。 (二)在图示4 个分图中,图不是杆组,而是两个杆组的组合。 (二)计算自由度,指出(或在图中标出)局部自由度、复合铰、虚约束,及运动链有确定运动的条件,并对机构进行结构分析,确定机构级别。
(三)用速度的瞬心法求图示位置构件2与4的传动比i 24 (三) 试 求 图 示 机 构 的 全 部 瞬 心, 并 应 用 瞬 心 法 求 构 件3 的 移 动 速 度v 3 的 大 小 和 方 向。 图 中 已 知 数 据 h =50 m m ,φ160=?,ω110= r a d /s 。(再用矢量方程图解法做) (三)已知机构中各构件的尺寸及速度多边形( μv = 0.5m/s/mm ) (1) 写出矢量32b b 代表的速度(例如代表速度E v ); (2) 说明杆3的角速度ω 3的方向(顺时针还是逆时针); (3) 用相对运动图解法在速度多边形上确定v F 的大小。
一机构结构 二平面连杆机构及其分析设计 三凸轮机构及其设计 四论析及其设计 六机构的动力学 1-1答案:a)自由度数为3。约束掉3个移动,保留3个转动自由度,为3级运动副。 b) 自由度数为3。约束掉1个移动、2个转动,保留2个移动,1个转动自由度,为3级运动副。 c) 自由度数为1。约束掉2个移动、3个转动,保留1个移动自由度,为5级运动副。 d) 自由度数为1。约束掉3个移动、2个转动,保留1个转动自由度,为5级运动副。 e) 自由度数为2。约束掉2个移动、2个转动,保留1个移动,1个转动自由度,为4级运动副。 1-1答案:a)自由度数为3。约束掉3个移动,保留3个转动自由度,为3级运动副。 b) 自由度数为3。约束掉1个移动、2个转动,保留2个移动,1个转动自由度,为3级运动副。 c) 自由度数为1。约束掉2个移动、3个转动,保留1个移动自由度,为5级运动副。 d) 自由度数为1。约束掉3个移动、2个转动,保留1个转动自由度,为5级运动副。
e) 自由度数为2。约束掉2个移动、2个转动,保留1个移 动,1个转动自由度,为4级运动副。 1- 2答案:a)其结构的自由度F=3×8-2×10-2=2或F=3×9-2×11-1=2。机构运动简图: b)自由度F=3×5-2×7=1。机构运动简图:
c)自由度F=3×6-2×4=1。机构运动简图: d)自由度F=3×5-2×7=1。机构运动简图:
1-3答案:∵F=1,N=10 ∴单链数P=3N/2-(F+3)/2=13 闭环数k=P+1-N=4 由P33页公式1-13a可得: N3+2N4+N5=6 N2+N3+N4+N5=10 由上式可得自由度F=1 的10杆单链运动链的基本方案如下:运动链闭合回运动副2元素3元素4元素5元素
糕点切片机说明书 第五组 易万力、李华斌、杨永亮、林楷、王博 指导老师:李小江 目录
一、设计题目和要求 1.题目: 糕点切片机 2.工作原理及工艺动作简述 糕点切片机的切刀运动机构由电动机驱动,经减速后使切刀实现切片所需的某种往复运动。糕点铺在传送带上,间歇地进行输送,通过改变传送带输送速度或每次间隔的输送距离,以满足糕点不同切片规格尺寸的需要。糕点先成型,经切片后再烘干。 3.原始数据及设计要求(组号:5 数据号:3) (1)糕点厚度:10~17mm。 (2)糕点切片长度:45mm。 (3)切刀切片最大作用距离:300mm。
(4)切刀工作节拍:50次/min。 (5)生产阻力甚小。设计要求机构简单、轻便、运动灵活可靠。 (6)电机参考规格: 1300r/min。 4.难点提示及注意事项 (1)切削速度较大时,切片刀口会整齐平滑,因此切刀运动方案的选择很关键,切口机构应力求简单适用、运动灵活和运动空间尺寸紧凑 等。 (2)直线间歇运动机构如何满足切片长度尺寸的变化要求,是需要认真考虑的。调整机构必须简单可靠,操作方便。是采用调速方案,还 是采用调距离方案,或采用其它调速方案,均应对方案进行定性分 析比较。 (3)间歇输送机构必须与切刀运动机构工作协调,即全部送料运动应在切刀返回过程中完成。需要注意的是,切口有一定的厚度,输送运 动必须等切刀完全脱离切口后方能开始进行,但输送机构的返回运 动则可与切刀的工作行程在时间上有一段重叠,以利提高生产率, 在设计机器工作循环图时,应注意上述特点并适当选择输送运动机 构的设计参数。
二、执行机构设计 1.工艺动作分解和机构分解 糕点切片机要求完成两个动作: (1)糕点的直线间歇运动 (2)切刀往复直线运动 2. 执行机构的选择及评价 糕点直线间歇运动机构可采用棘轮机构、不完全齿轮机构、槽轮机构等。 切刀往复直线运动机构可采用导杆机构、凸轮机构、曲柄滑块机构等。 (1)糕点直线间歇运动机构:
电气工程及其自动化考研总况 一、全国电气工程及其自动化专业学校排名 1.清华大学 2.西安交通大学 3.华中科技大学 4.浙江大学 5.重庆大学 6.天津大学 7.哈尔滨工业大学 8.上海交通大学 9.华北电力大学10.东南大学11.西南交通大学12.沈阳工业大学13.中国矿业大学14.华南理工大学15.南京航空航天大学16.北京交通大学17.武汉大学18.哈尔滨理工大学19.四川大学20.河海大学21.哈尔滨工程大学22.郑州大学23.广西大学24.陕西科技大学 二,电气工程与自动化专业 (1)业务培养目标: 业务培养目标:本专业培养在工业与电气工程有关的运动控制、工业过程控制、电气工程、电力电子技术、检测与自动化仪表、电子与计算机技术等领域从事工程设计、系统分析、系统运行、研制开发、经济管理等方面的高级工程技术人才。 业务培养要求:本专业学生主要学习电工技术、电子技术、自动控制理论、信息处理、计算机技术与应用等较宽广领域的工程技术基础和一定的专业知识。学生受到电工电子、信息控制及计算机技术方面的基本训练,具有工业过程控制与分析,解决强弱电并举的宽口径专业的技术问题的能力。
(2)主干课程: 主干学科:电气工程、控制科学与工程、计算机科学与技术 主要课程:电路原理、电子技术基础、计算机原理及应用、计算机软件基础、控制理论、电机与拖动、电力电子技术、信号分析与处理、电力拖动控制系统、工业过程控制与自动化仪表等。高年级可根据社会需要设置柔性的专业方向模块课及选修课。 主要实践性教学环节:包括电路与电子基础实验、电子工艺实习、金工实习、专业综合实验、计算机上机实践、课程设计、生产实习、毕业设计。 主要实验:运动控制实验、自动控制实验、计算机控制实验、检测仪表实验、电力电子实验等 (3)修业年限: 四年 (4)授予学位: 工学学士 (5)相近专业: 微电子学自动化电子信息工程通信工程计算机科学与技术电子科学与技术生物医学工程电气工程与自动化信息工程信息科学技术软件工程影视
自动控制理论(一)复习指南和要求【】
第二章 控制系统的数学模型复习指南与要点解析 要求: 根据系统结构图应用结构图的等效变换和简化或者应用信号流图与梅森公式求传递函数(方法不同,但同一系统两者结果必须相同) 一、控制系统3种模型,即时域模型----微分方程;※ 复域模型 ——传递函数;频域模型——频率特性。其中重点为传递函数。 系统输出量的拉氏变换式与输入量的拉氏变换式之比)和性质。 零初始条件下:如要求传递函数需拉氏变换,这句话必须的。 二、※※※结构图的等效变换和简化--- 实际上,也就是消去中间变量求取系统总传递函数的过程。 1.等效原则:变换前后变量关系保持等效,简化的前后要保持一致(P45) 2.结构图基本连接方式只有串联、并联和反馈连接三种。如果结构图彼此交叉,看不出3种基本连接方式,就应用移出引出点或比较点先解套,再画简。其中: ※引出点前移在移动支路中乘以()G s 。(注意:只须记住此,其他根据倒数关系导出即可) 引出点后移在移动支路中乘以1/()G s 。 相加点前移在移动支路中乘以1/()G s 。 相加点后移在移动支路中乘以()G s 。 [注]:乘以或者除以()G s ,()G s 到底在系统中指什么,关键看引出点或者相加点在谁的前后移动。在谁的前后移动,()G s 就是谁。 例1: ) 解法 1: 1) 3()G s 前面的引出点后移到3()G s 的后面(注:这句话可不写,但是必须绘制出下面的结构图,) 2) 消除反馈连接
) 3) 消除反馈连接 4) 得出传递函数 123121232123()()()() ()1()()()()()()()()() G s G s G s C s R s G s G s H s G s G s H s G s G s G s =+++ [注]:可以不写你是怎么做的,但是相应的解套的那步结构图必须绘制出来。一般,考虑到考试时间限制,化简结构图只须在纸上绘制出2-3个简化的结构图步骤即可,最后给出传递函数 () () C s R s =。。。。) 解法 2: 1()G s 后面的相加点前移到1()G s 前面,并与原来左数第二个相加点交换位置,即可解套,自己试一下。 [注]:条条大路通罗马,但是其最终传递函数 () () C s R s =一定相同) [注]:※※※比较点和引出点相邻,一般不交换位置※※※,切忌,否则要引线) 三. ※※※应用信号流图与梅森公式求传递函数 梅森公式: ∑=??=n k k k P P 1 1 式中,P —总增益;n —前向通道总数;P k —第k 条前向通道增益; △—系统特征式,即Λ+-+-=?∑∑∑f e d c b a L L L L L L 1 Li —回路增益; ∑La —所有回路增益之和; ∑LbLc —所有两个不接触回路增益乘积之和; ∑LdLeLf —所有三个不接触回路增益乘积之和; △k —第k 条前向通道的余因子式,在△计算式中删除与第k 条前向通道接触的回路。 [注] :一般给出的是结构图,若用梅森公式求传递函数,则必须先画出信号流图。 注意2:在应用梅森公式时,一定要注意不要漏项。前向通道总数不要少,各个回路不要漏。 例2: 已知系统的方框图如图所示 。试求闭环传递函数C (s )/R (s ) (提示:应用信号流图及梅森公式) 解1) [注]
模拟题一 ?计算图示机构自由度,指明复合铰链,局部自由度,和虚约束所 在;进行高副低代,然后拆分杆组,判断机构的级别。(20分) 二.在图示的机构中,已知各构件长度,原动件以等角速度w i=io rad/s 逆时针转动,试用图解法求点D的速度。(20分) 三.1?图示铰链四杆机构中,已知各构件的长度l AB=25mm, l Bc=55mm,l cD=40mm, l AD=50mm,试问:(15分) (1)该机构是否有曲柄,如有,请指出是哪个构件; (2)该机构是否有摇杆,如有,请指出是哪个构件; (3)该机构是否有整转副,如有,请指出是哪个转动副;
2.设计一铰链四杆机构,如图所示,已知行程速比系数K=1,机架长L AD=100mm,曲柄长L AB=20mm,当曲柄与连杆共线,摇杆处于最远的极限位置时,曲柄与机架的夹角为30° ,确定摇杆及连杆的长度。(20分) 四.图示机构的凸轮轮廓线由两段直线和两段圆弧组成。(1)画出偏距圆;(2)画出理论廓线;(3)画出基圆;(4)画出当前位置的从动件位移s;(5)画出当前位置的凸轮机构压力角;(6)画出从动件升程h。(7)凸轮的推程角?,近休止角? s',回程角? ' (20分) 五?一对正常齿制标准安装的外啮合标准直齿圆柱齿轮传动,已知传动比 i=2.5,中心距a=175mm,小齿轮齿数z仁20,压力角沪20°。试计算模数m、大齿轮的几何尺寸基圆直径,齿顶圆直径和齿根圆直径。 (20 分) 六.图示轮系各轮的齿数已在括号中标注,已知主动轮1的转速为每分钟1转、主动轮4的转速为每分钟2转,转向如图所示。试求输出
构件H的转速和转向。(20分) 3(30) 2 (30) -n3'(20) 七.图示减速器,已知传动比i=Z2/z i=3,作用在大齿轮上的阻力矩随大齿轮的转角血变化,其变化规律为:当0<=靱<=120°时,阻力矩为 M2=300N?m当120° <=2<=360°时,阻力矩为M=0,又已知小齿轮的 转动惯量为J i ,大齿轮的转动惯量为J2。假设作用在小齿轮上的驱动力矩M 为常数,小齿轮为等效构件。试求等效转动惯量J e,等效驱动力矩M,等效阻力矩M。(15分)
电气工程及自动化专业考研学校科目 北京工业大学 421自动控制原理 复试:1、电子技术2、计算机原理 北京航空航天大学 [双控] 432控制理论综合或433控制工程综合 [检测] 433控制工程综合或436检测技术综合 [系统] 431自动控制原理或451材料力学或841概率与数理统计 [模式] (自动化学院)433控制工程综合或436检测技术综合、(宇航学院)423信息类专业综合或431自动控制原理或461计算机专业综合 [导航] (自动化学院)432控制理论综合或433控制工程综合、(宇航学院)431自动控制原理 复试:无笔试。1) 外语口语与听力考核;2) 专业基础理论与知识考核;3) 大学阶段学习成绩、科研活动以及工作业绩考核;4) 综合素质与能力考核 北京化工大学 440电路原理 复试:综合1(含自动控制原理和过程控制系统及工程)、综合2(含自动检测技术装置和传感器原理及应用)、综合3(含信号与系统和数字信号处理) 注:数学可选择301数学一或666数学(单) 北京交通大学 [双控/检测]404控制理论 [模式]405通信系统原理或409数字信号处理 复试: [电子信息工程学院双控]常微分方程 [机械与电子控制工程学院检测]综合复试(单片机、自动控制原理) [计算机与信息技术学院模式] 信号与系统或操作系统 北京科技大学 415电路及数字电子技术(电路70%,数字电子技术30%) 复试:1.数字信号处理2.自动控制原理 3.自动检测技术三选一 北京理工大学 410自动控制理论或411电子技术(含模拟数字部分) 复试:微机原理+电子技术(初试考自动控制理论者)、微机原理+自动控制理论(初试考电子技术者)、运筹学+概率论与数理统计。 北京邮电大学 [双控][模式]404信号与系统或410自动控制理论或425人工智能 [检测]407电子技术或410自动控制理论 复试: [双控]数据结构控制与智能
平面运动链自由度计算公式为 H L 23p p n F --=运动链成为机构的条件 运动链成为机构的条件是:取运动链中一个构件相对固定作为机架,运动链相对于机架的自由度必须大于零,且原动件的数目等于运动链的自由度数。 满足以上条件的运动链即为机构,机构的自由度可用运动链自由度公式计算。 一、平面机构的结构分析
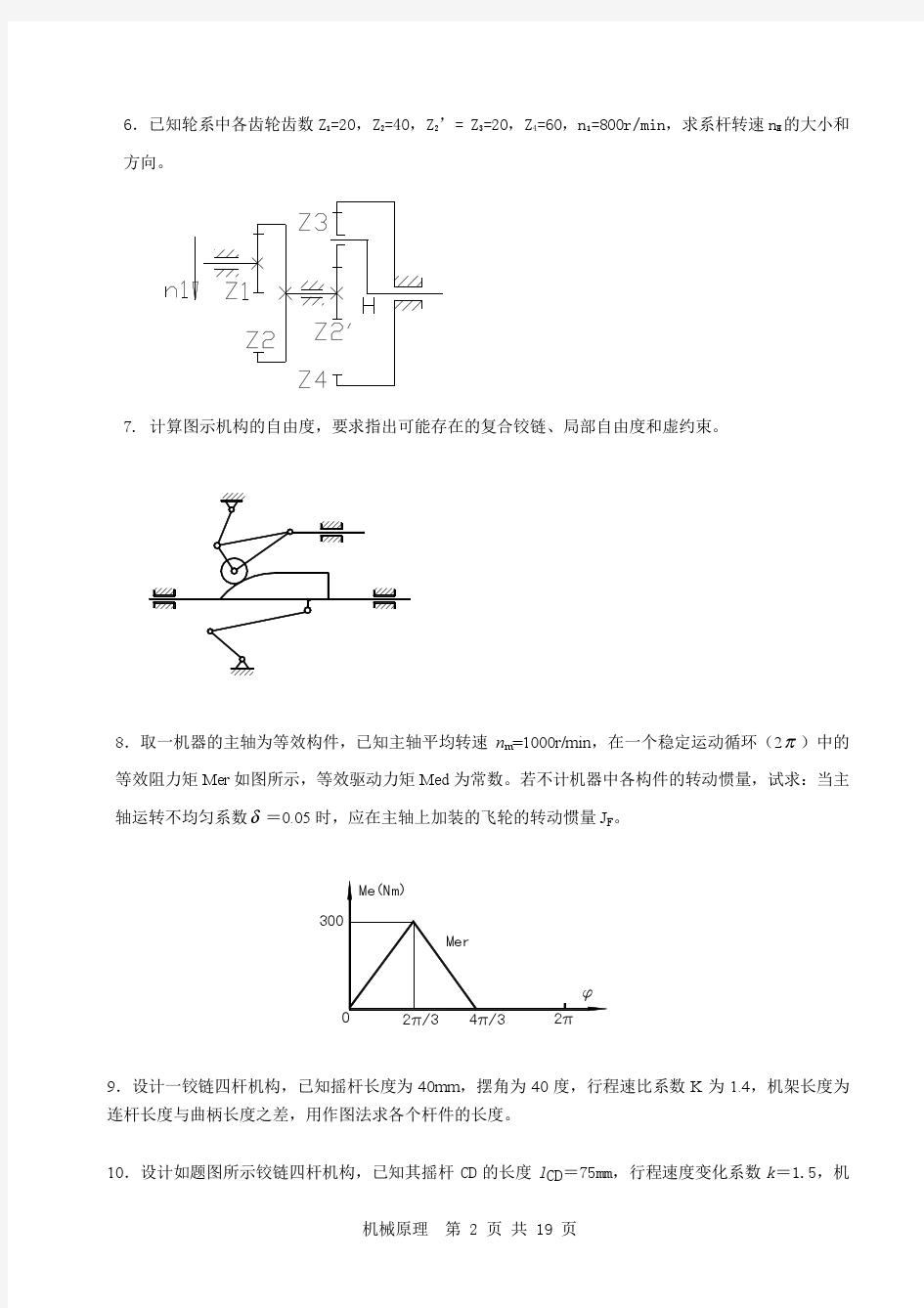
计算错误的原因 例题圆盘锯机构自由度计算 解 n =7,p L =6,p H =0 F =3n -2p L -p H =3?7-2?6=9错误的结果! 1234 5 67 8 A B C D E F 两个转动副
1234 5 67 8 A B C D E F ●复合铰链(Compound hinges ) 定义:两个以上的构件在同一处以转动副联接所构成的运动副。 k 个构件组成的复合铰链,有(k -1)个转动副。 正确计算 B 、 C 、 D 、 E 处为复合铰链,转动副数均为2。 n =7,p L =10,p H =0 F =3n -2p L -p H =3?7-2?10=1
准确识别复合铰链举例 关键:分辨清楚哪几个构件在同一处用转动副联接 12 3 1 3 4 2 4 1 3 231 2 两个转动副两个转动副 两个转动副 两个转动副 1 2 3 4 两个转动副 1 4 2 3 两个转动副
例题计算凸轮机构自由度 F=3n-2p L-p H=3?3-2?3-1=2 ? ●局部自由度(Passive degree of freedom) 定义:机构中某些构件所具有的仅与其自身的局部运动有关的自由度。 考虑局部自由度时的机构自 由度计算 设想将滚子与从动件焊成一体 F=3?2-2?2-1=1 计算时减去局部自由度F P F=3?3-2?3-1-1(局部自由度)=1
控制科学与工程[自动化]招生单位专业课类比本表所统计专业课的仅是“0811 控制科学与工程”一级学科下属的几个专业(二级学科)。双控=控制理论与控制工程;检测=检测技术与自动化装置;系统=系统工程;模式=模式识别与智能系统;导航=导航、制导与控制;复试——指的是复试笔试科目。 此仅为部分重点院校或重点专业;部分学校的同一名称的专业分布在不同的学院,也一并列出。 北京工业大学 421自动控制原理 复试:1、电子技术2、计算机原理 北京航空航天大学 [双控] 432控制理论综合或433控制工程综合 [检测] 433控制工程综合或436检测技术综合 [系统] 431自动控制原理或451材料力学或841概率与数理统计 [模式] (自动化学院)433控制工程综合或436检测技术综合、(宇航学院)423信息类专业综合或431自动控制原理或461计算机专业综合 [导航] (自动化学院)432控制理论综合或433控制工程综合、(宇航学院)431自动控制原理 复试:无笔试。1) 外语口语与听力考核;2) 专业基础理论与知识考核;3) 大学阶段学习成绩、科研活动以及工作业绩考核;4) 综合素质与能力考核 北京化工大学 440电路原理 复试:综合1(含自动控制原理和过程控制系统及工程)、综合2(含自动检测技术装置和传感器原理及应用)、综合3(含信号与系统和数字信号处理) 注:数学可选择301数学一或666数学(单) 北京交通大学 [双控/检测]404控制理论 [模式]405通信系统原理或409数字信号处理 复试: [电子信息工程学院双控]常微分方程 [机械与电子控制工程学院检测]综合复试(单片机、自动控制原理) [计算机与信息技术学院模式] 信号与系统或操作系统 北京科技大学 415电路及数字电子技术(电路70%,数字电子技术30%) 复试: 1.数字信号处理 2.自动控制原理 3.自动检测技术三选一 北京理工大学 410自动控制理论或411电子技术(含模拟数字部分)
2019年宁波大学硕士研究生招生考试初试科目考试大纲 科目代码、名称: 892机械原理 一、考试形式与试卷结构 (一)试卷满分值及考试时间 本试卷满分为150分,考试时间为180分钟。 (二)答题方式 答题方式为闭卷、笔试。试卷由试题和答题纸组成;答案必须写在答题纸(由考点提供)相应的位置上。 (三)试卷内容结构 考试内容主要包括平面机构的结构分析、平面机构运动分析、平面机构的力分析和机械效率、刚性回转件的平衡、机械速度波动的调节、平面连杆机构及其设计、凸轮机构及其设计、齿轮机构及其设计、轮系及其设计、其他常用机构。 (四)试卷题型结构 1.选择(填空)题 2.问答题 3.计算题 4. 综合分析设计题 二、考查目标 课程考试的目的在于测试考生对于机械原理相关的基本概念、基本理论、基础知识的掌握情况、机构的综合分析设计以及解决实际问题的能力,主要目标包括:1.掌握常用机构主要类型、特点、应用等基本知识;2.掌握常用机构的运动特性及设计基本理论与基本方法、机械动力学的基本原理和计算方法;3. 具有能综合运用上述基本知识、基本理论与基本方法解决实际设计问题的能力。 三、考查范围或考试内容概要 第一部分:平面机构的结构分析
1.理解零件、构件、运动副及运动链、机构、机械、机器的概念,了解机构引入运动 副之后运动所受到的约束。 2.掌握机构运动简图的绘制。 3.掌握平面机构的自由度计算及机构具有确定运动的条件,并能识别机构中的复合铰 链、局部自由度和虚约束。 4.掌握平面机构的高副低代方法和Ⅱ级、Ⅲ级杆组的结构特点,掌握平面机构的组成原 理和结构分析方法。 第二部分:平面机构运动分析 1.理解速度瞬心的概念,掌握机构速度瞬心的确定方法以及速度瞬心法在机构速度分 析中的应用。 2.掌握应用矢量方程图解法作平面机构的位置、速度和加速度分析。 3.熟悉用解析法作平面机构的位置、速度、加速度分析的思路。 第三部分:平面机构的力分析和机械效率 1.了解平面连杆机构动态静力分析数学模型的建立思路。 2.掌握运动副中摩擦力的确定、计入运动副摩擦时的机构静力分析方法。 3.掌握机械效率及计算方法,深入理解机械自锁概念,能通过力分析或效率分析进行 机械自锁性判别和自锁条件的建立。 第四部分:刚性回转件的平衡 1.掌握刚性回转件的静平衡与动平衡的原理和平衡设计计算方法。 2.了解平面机构的平衡原理。 第五部分:机械速度波动的调节 1.掌握机械系统等效动力学模型的等效原则及建立与求解方法。 2.理解机械运转的平均速度和不均匀系数的概念,周期性与非周期性速度波动的原因 及调节方法;掌握机器周期性速度波动的飞轮调速原理及飞轮设计方法。 第六部分:平面连杆机构及其设计 1.了解平面四杆机构的基本型式、特点及其演化。 2.掌握平面四杆机构的主要工作特性(包括平面四杆机构存在曲柄的条件,急回特性 与极位夹角,压力角和传动角及最小传动角出现位置,以及死点位置)。 3.掌握平面四杆机构的常用设计方法,重点是图解法(仅要求:a)实现连杆位置的运 动设计;b)两连架杆对应位置;c)已知行程速度变化系数及附加条件),对于解析法熟悉解法思路。
机械原理课程设计 --步进输送机 机械工程学院 机械设计制造及其自动化专业 指导老师:虞红根 姓名:施志祥学号:101816 设计人:徐青、施志祥、高瑜刚、李浩伦 完成日期:2012年5月11日 设计题目及要求 题目:步进输送机设计(题二) 工作原理: 步进输送机是一种间歇输送工件的传送机械。工件由料仓卸落到轨道上。滑架作往复运动,滑架正行程时,使工件向前运动;滑架返回时,工件不动。当滑架又向前运动时,使下一个工件向前运动,可使工件保持一定的时间间隔卸落到轨道上。 原始数据及设计要求: 1)输送工件的形状和尺寸,如下图所示。
单位:mm 输送步长为H=840mm。 2)滑架工作行程平均速度为s。要求保证输送速度尽可能的均匀,行程速比系数K值为左右。 3)滑架导轨水平线至安装平面的高度在1100mm以下。 4 )电动机功率可选用, 1400r/min左右(如Y90S-4)。 注意事项及难点提示: 1)机构的协调设计; 2)步进输送机构与插断机构的主要审计参数有些已给定,有些需要计算或自行确定。比如,可按已知行程,平均速度和行程速比系数确定曲柄转速。 3)步进输送机运动简图应进行多方案比较。工件的运送要求平稳和有较高的定位精度。进行方案评价是,侧重点应放在运动和动力功能质量方面(比如,工件停放在工位上之前的速度变化应尽量平缓)。 工艺动作分解
机构选型 加料:由工件做自由落体运动完成 插断:插断机构 方案一: 工作原理: 运用凸轮加弹簧,使工件往下掉的开关始终与凸轮表面接触,从而与凸轮表面运行轨迹一致,实现开关一开一闭。 优点: 1. 只要适当地设计出凸轮的轮廓曲线,就可以使推杆得到想要的 运动规律,易实现插断; 2. 结构紧凑,计算简单。 缺点: 1.加工两个凸轮,成本较高; 2.凸轮与推杆之间的点、线接触,是使得凸轮轮廓易磨损; 3.较难实现同步传递动力给两个凸轮。 方案二: 工作原理: 利用双摆杆机构带动插板运动实现插断。 优点:
模拟题一 一.计算图示机构自由度,指明复合铰链,局部自由度,和虚约束所在;进行高副低代,然后拆分杆组,判断机构的级别。(20分)二.在图示的机构中,已知各构件长度,原动件以等角速度w1=10rad/s逆时针转动,试用图解法求点D的速度。(20分)三.1.图示铰链四杆机构中,已知各构件的长度l AB=25mm,l BC=55mm,l CD=40mm,l AD=50mm,试问:(15分) (1)该机构是否有曲柄,如有,请指出是哪个构件; (2)该机构是否有摇杆,如有,请指出是哪个构件; (3)该机构是否有整转副,如有,请指出是哪个转动副; 2.设计一铰链四杆机构,如图所示,已知行程速比系数K=1,机架长L AD=100mm,曲柄长L AB=20mm,当曲柄与连杆共线,摇杆处于最远的极限位置时,曲柄与机架的夹角为30°,确定摇杆及连杆的长度。(20分) 四.图示机构的凸轮轮廓线由两段直线和两段圆弧组成。(1)画出偏距圆;(2)画出理论廓线;(3)画出基圆;(4)画出当前位置的从动件位移s;(5)画出当前位置的凸轮机构压力角;(6)画出从动件升程h。(7)凸轮的推程角φ,近休止角φs’,回程角φ’(20分)五.一对正常齿制标准安装的外啮合标准直齿圆柱齿轮传动,已知传动比i=2.5,中心距a=175mm,小齿轮齿数z1=20,压力角α=20°。试计算模数m、大齿轮的几何尺寸基圆直径,齿顶圆直径和齿根圆
直径。(20分) 六.图示轮系各轮的齿数已在括号中标注,已知主动轮1的转速为每分钟1转、主动轮4的转速为每分钟2转,转向如图所示。试求输出构件H 的转速和转向。(20分) 七.图示减速器,已知传动比i=z 2/z 1=3,作用在大齿轮上的阻力矩随大齿轮的转角φ2变化,其变化规律为:当0<=φ2<=120°时,阻力矩为M 2=300N ?m ;当120°<=φ2<=360°时,阻力矩为M 2=0,又已知小齿轮的转动惯量为J 1,大齿轮的转动惯量为J 2。假设作用在小齿轮上的驱动力矩M 1为常数,小齿轮为等效构件。试求等效转动惯 量J e 分) 模拟题二 一.1. (8分) 2.以AB 为原动件对图示机构进行结构分析,要求画出原动件、基本组,并指出机构的级别。(8分) 3.(4分) 二.法求杆5的角速度w 5,写出求解的速度矢量方程,作出速度多边形(20分) 三.平面连杆机构及其设计(35分) 2
(答题请做在答卷纸上,并写清题号。做在草稿纸上的无效) 一、已知系统结构图如下图所示。 1、试通过结构图等效变换求C(S)/R(S); 2、试画出相应的信号流图,并运用梅逊增益公式求E(S)/R(S)。 二、已知单位负反馈系统的开环传递函数为:) 1(10 )(+=s s s G 1. 画出系统的近似对数幅频、相频特性曲线; 2. 判断闭环系统的稳定性。如果系统稳定,求系统的相角裕度γ和幅值裕度h 。 第1页 共 2 页 考试中心填写: ___年___月___日 考 试 用 湖南大学课程考试试卷 课程名称: 自动控制原理; 试卷编号: ; 考试时间:120分钟 题 号 一 二 三 四 五 六 七 八 九 十 总 分 应得分 100 实得分 评分: 评卷人 姓名: 学号: 专业班级: 装订线(答题不得超过此线) G 1(S) G 2 (S) G 3 (S) H 1(S) G 4(S) R(S) C(S) _ · · E(S) _
三、一线性连续控制系统如下图所示。 1、用劳斯判据判断K 为何值时,系统稳定; 2、当K 为何值时,系统发生持续等幅振荡,求其振荡角频率ωn 。 一 四、已知控制系统开环传递函数为 G(S)H(S)= ) 3)(6(++s s k 1、绘制当K 从0→∞变化时系统的根轨迹; 2、求闭环系统稳定的K 值范围。 五、离散系统如下图所示。 1、设G 1(S)=s e Ts --1,G 2(S)= ) 1(10 +s s ,样周期T=1s ,试写出闭环脉冲传递函数Φ(Z ); 2、在z 域中分析系统的稳定性; 3、求 r(t)=1(t)+t 时系统的稳态误差。 六、最小相角系统的近似对数幅频特性曲线如图所示,试确定系统的开环传递函数。 R(S) C(S) 2)10(++s s k 2 20s s + G 1 (S) G 2 (S)
1-1.图题1-1是由点(线)接触所构成的运动副。试分析计算它们的自由度数量和性质,并从封闭形式和受力状况与相对应的面接触低副进行比较。 1-2.观察分析工作原理,绘制机构运动简图,计算机构自由度。 题图1-2a为一夹持自由度。实线位置为从上输送带取出工件(夹头处于夹紧状态);虚线位置为将工件放到下输送带上(夹头松开)。该机构是由行星轮系、凸轮机构及连杆机构组合而成。 题图1-2b是为了减小活塞与汽缸盖之间的摩擦而设计的一种结构形式的内燃机,画出它们的机构运动简图、计算其自由度。分析结构中存在的虚约束和它们是如何来实现减小摩擦这一目的的。 题图1-2c为一种型式的偏心油泵,画出其机构运动简图,计算其自由度,并分析它们是如何由运动简图演化得到的。 题图1-2d为针织机的针杆驱动装置的结构示意图,绘制其机构运动简图及运动链图。
1-3.用公式推导法,求出F=1、N=10的单铰运动链的基本结构方案以及它们的单铰数和所形成的闭环数k,并从中找出图1-17所示的双柱压力机构简图所对应的运动链。 1-4.计算下列各机构的自由度。注意分析其中的虚约束、局部自由度合复合铰链等。题图1-4a为使5、6构件能在相互垂直方向上作直线移动的机构,其中AB=BC=CD=AD。 题图1-4b为凸轮式4缸活塞气压机的结构简图,在水平和垂直方向上作直线运动,其中仍满足AB=BC=CD=AD。 题图1-4c所示机构,导路AD⊥AC、BC=CD/2=AB。该机构可有多种实际用途,可用于椭圆仪,准确的直线轨迹产生器,或作为压缩机或机动马达等。 题图1-4d为一大功率液压动力机。其中AB=A`B`,BC=B`C`,CD=
目 录 2008年同济大学813机械原理考研真题 2012年同济大学813机械原理考研真题(计算题回忆版) 2014年同济大学813机械原理考研真题(回忆版) 2016年同济大学813机械原理考研真题(手写版)
2008年同济大学813机械原理考研真题 一、概念题(每空1.5分,共30分) 1.请写出三种可作间歇运动的机构______、______、______。 2.当直齿轮与直齿条标准啮合时,齿轮的节圆与分度圆______,齿条的节线与分度线______;当直齿轮与直齿条非标准啮合时,齿轮的节圆与分度圆______,齿条的节线与分度线______。 3.机械的周期性速度波动可采用______来调节,而非周期性速度波动一般用______来调节。 4.对于静平衡的转子,有可能是______不平衡的;而动平衡的转子,则一定是______平衡的。 5.某平面基本杆组有4个构件,其低副数为______。 6.某机械系统的等效质量的大小,( )。 A.等于系统中所有构件的质量之和 B.与系统中各构件质量的平方和有关 C.与系统的瞬时功率的大小有关 D.与该系统的动能的大小有关 7.当一对渐开线齿轮制成后,即使两轮的中心距稍有改变,其角速度之比仍保持原值不变,原因是( )。 A.啮合角不变 B.压力角不变 C.基圆半径不变 D.节圆半径不变
8.在下列的传动比计算公式中,对蜗杆传动来说,( )是错误的?A. B. C. D. 9.有急回运动特性的平面连杆机构的行程速比系数( )。 A.K=1 B.K>1 C.K≤1 D.K<1 10.斜齿圆柱齿轮的法面模数与端面模数的关系是( )。A. B. C. D. 11.若以曲柄为原动件,当曲柄摇杆机构的原动件位于( )时,机构的传动角最小? A.曲柄与连杆共线的两个位置之一 B.曲柄与机架共线的两个位置之一
自动控制考研胡寿松《自动控制原理》考研真题与考 点复习 第一部分考研真题精选与解析 一、单选题 1线性系统的主要特点有()。[华中科技大学2009年研] A.稳定性 B.振荡性 C.收敛性 D.齐次性 【答案】DXXXX 【解析】线性系统的重要性质是可以应用叠加原理,叠加原理有两重含义,既具有可叠加性和齐次性。 2对控制作用进行适当的补偿(复合控制),可使系统()。[湖南大学2006年研] A.由不稳定变成稳定 B.减小非线性的影响 C.提高无差度 D.同时改善快速性和抗干扰能力 【答案】DXXXX
【解析】复合控制只要参数选择合适,不仅可以改善快速性,还能保持系统稳定,减小稳态误差、抑制几乎所有可测量扰动。 3在通常的闭环控制系统结构中,系统的控制器和控制对象共同构成了()。[杭州电子科技大学2008年研] A.开环传递函数 B.反馈通道 C.前向通道 D.闭环传递函数 【答案】CXXXX 【解析】前向通道是指闭环系统中,从系统输入量到系统被控制量之间的通道。因此控制器和控制对象就组成了通常闭环控制系统的前向通道。 4系统的传递函数与下列因素有关()。[华中科技大学2009年研] A.系统结构 B.初始条件 C.系统结构和参数 D.系统结构、参数和初始条件 【答案】CXXXX 【解析】传递函数是一种用系统参数表示输出量与输入量之间关系的表达式,它只取决于系统或元件的结构和参数,而与输入量的形式无关,也不反应系统内部的任何信息。
5传递函数的概念除了适用于线性定常系统之外,还可用于描述()系统。[杭州电子科技大学2008年研] A.线性时变 B.非线性定常 C.非线性时变 D.以上都不是 【答案】DXXXX 【解析】传递函数定义为线性定常系统零初始条件下,系统输出量与输入量的拉氏变换之比,只适用于线性定常系统。 6下面系统中属于线性系统的是()。[东南大学研] 系统1:y=3u+2;系统2:y=usint A.1和2 B.1 C.2 D.都不是 【答案】DXXXX 【解析】系统(1)和系统(2)不满足线性系统叠加原理,故都不是线性系统,答案为D。 7设f(t)=te t·1(t),则F(s)=()。[清华大学研]
2-4.题图2-4所示六杆机构中,各构件的尺寸为:l AB=30mm,l BC=55mm,l AD=50mm,l CD=40mm,l DE=20mm,l EF=60mm.滑块为运动输出构件.试确定:1)四杆机构ABCD的类型. 2)机构的行程时间比系数K为多少? 3)滑块F的行程H为多少? 4)求机构的最小传动角γmin.传动角最大值为多少? 导轨DF在什么位置时滑块在运动中的压力角最小? 2-5.题图2-5所示六杆机构.已知l AB=200mm,l AC=585mm,l CD=30mm,l DE=700mm,AC⊥EC,ω1为常数.试求: 1)机构的行程时间比系数K; 2)构件5的行程H; 3)机构的最小传动角γmin为多少?传动角的最大值为多少? 4)滑块的最大压力角αmax发生的位置及大小;欲使αmax减小,应对机构做怎样改进? 5)在其他尺寸不变的情况下,欲使行程为原行程的2倍,问曲柄长度应为多少?
2-12.在题图2-12所示缩放机构中,已知构件1的角速度ω1,试作出机构的速度多边形图并示出Ⅰ点的速度vⅠ。 2-28.题图2-28所示为一已知的曲柄摇杆机构,现要求用一连杆将摇杆CD和一滑块F连接起来,使摇杆的三个已知位置C1D、C2D、C3D和滑块的三个位置F1、F2、F3相对应。试确定此连杆的长度及其与摇杆CD铰接点的位置。 2-32.题图2-32所示为一牛头的主传动机构,已知l AB=75mm,l DE=100mm,
行程时间比系数K=2,刨头5的行程H=300mm,要求在整个行程中,刨头5有较小的压力角,试设计此结构。 4-2.在题图4-2所示的手摇提升装置中,已知各轮齿数为z1=20,z2=50,z3=15,z4=30,z6=40,z7=18,z8=51,蜗杆z5=1为右旋,试求传动比i18并确定提升重物时的转向. 4-8.题图4-8所示轮系中,已知各轮齿数为:z1=60,z2=20,z2’=20,z3=20,z4=20,z5=100.试求传动比i41.
本表所统计专业课的仅是“0811 控制科学与工程”一级学科下属的几个专业(二级学科)。双控=控制理论与控制工程;检测=检测技术与自动化装置;系统=系统工程;模式=模式识别与智能系统;导航=导航、制导与控制;复试——指的是复试笔试科目。 此仅为部分重点院校或重点专业;部分学校的同一名称的专业分布在不同的学院,也一并列出。还有若干学校复试信息不完全,请予以补充;如果信息有误,请指明。 北京工业大学 421自动控制原理 复试:1、电子技术2、计算机原理 北京航空航天大学 [双控] 432控制理论综合或433控制工程综合 [检测] 433控制工程综合或436检测技术综合 [系统] 431自动控制原理或451材料力学或841概率与数理统计 [模式] (自动化学院)433控制工程综合或436检测技术综合、(宇航学院)423信息类专业综合或431自动控制原理或461计算机专业综合 [导航] (自动化学院)432控制理论综合或433控制工程综合、(宇航学院)431自动控制原理 复试:无笔试。1) 外语口语与听力考核;2) 专业基础理论与知识考核;3) 大学阶段学习成绩、科研活动以及工作业绩考核;4) 综合素质与能力考核 北京化工大学 440电路原理 复试:综合1(含自动控制原理和过程控制系统及工程)、综合2(含自动检测技术装置和传感器原理及应用)、综合3(含信号与系统和数字信号处理) 注:数学可选择301数学一或666数学(单) 北京交通大学 [双控/检测]404控制理论 [模式]405通信系统原理或409数字信号处理 复试: [电子信息工程学院双控]常微分方程 [机械与电子控制工程学院检测]综合复试(单片机、自动控制原理) [计算机与信息技术学院模式] 信号与系统或操作系统 北京科技大学 415电路及数字电子技术(电路70%,数字电子技术30%) 复试: 1.数字信号处理 2.自动控制原理 3.自动检测技术三选一 北京理工大学 410自动控制理论或411电子技术(含模拟数字部分) 复试:微机原理+电子技术(初试考自动控制理论者)、微机原理+自动控制理论(初试考电子技术者)、运筹学+概率论与数理统计。 北京邮电大学
第二章平面机构的结构分析 1.填空题: (1)机构具有确定运动的条件是;根据机构的组成原理,任何机构都可看成是由和组成的。 (2)由M个构件组成的复合铰链应包括个转动副。 (3)零件是机器中的单元体;构件是机构中的单元体。 (4)构件的自由度是指;机构的自由度是指。 (5)在平面机构中若引入一个高副将引入个约束,而引入一个低副将引入个约束,构件数、约束数与机构自由度的关系是。 (6)一种相同的机构组成不同的机器。 A.可以 B.不可以 (7)Ⅲ级杆组应由组成。 A.三个构件和六个低副; B.四个构件和六个低副; C.二个构件和三个低副。(8)内燃机中的连杆属于。 A.机器 B.机构 C.构件 (9)有两个平面机构的自由度都等于1,现用一个有两铰链的运动构件将它们串成一个平面机构,这时自由度等于。 A .0 B.1 C.2 (10)图1.10所示的四个分图中,图所示构件系统是不能运动的。 2.画出图1.11所示机构的运动简图。
3.图1.12所示为一机构的初拟设计方案。试求: (1)计算其自由度,分析其设计是否合理?如有复合铰链,局部自由度和虚约束需说明。(2)如此初拟方案不合理,请修改并用简图表示。 4.计算图1.13所示机构的自由度,判断是否有确定运动;若不能,试绘出改进后的机构简图。修改的原动件仍为AC杆(图中有箭头的构件)。 5.计算图1.14所示机构的自由度。 6.计算图1.15所示机构的自由度。
7.计算图1.16所示机构的自由度。 8.判断图1.17所示各图是否为机构。 9.计算图1.18所示机构的自由度。 10.计算图1.19所示机构的自由度。
欲索取更多考研资料,请上北京天问教育网站官网!一.(10分)是非题,( 在括号内正确的打√,错误的打?) 1、铰链四杆机构中,若取最短杆作机架,则为双曲柄机构。() 2、在凸轮机构中,从动件采用等加速等减速运动规律,是指在推程时作等加速运动, 而在回程时作等减速运动。() 3、渐开线外齿轮的齿根圆并非总是大于基圆。() 4、渐开线内齿轮的齿根圆并非总是大于基圆。() 5、范成法加工齿轮时,齿数越多越易发生根切。() 6、蜗杆机构的传动比不等于蜗轮蜗杆的直径比。() 7、同一对渐开线圆柱齿轮,当安装的中心距改变时传动比保持不变。() 8、重合度大于等于1时两直齿圆柱齿轮才能正确啮合。() 9、当驱动力矩Md下降,阻抗力矩Mr上升时,机器的动能必然减小. () 10、经过动平衡的转子不需要进行静平衡了。()二.填空题(每空1分共13分) 1、平面机构具有确定运动的条件是__________________________________________。 2、当两构件组成转动副时,其相对速度瞬心在______________________________处; 组成移动副时,在__________________________________________________处。3、转子静平衡的目的是__________________________________________________, 而动平衡的目的是_____________________________________________________。 4、平面高副的约束数为____________________,自由度为_____________________。 5、对于周期性速度波动,通常采用____________________________调速。 6、某直齿圆柱齿轮机构,已知m=2mm,z1=18,z2=31,ha*=1,α=20°,安装中心 距为50mm时,啮合角为____________________。顶隙为___________________。 7、渐开线在基圆上的压力角等于__________________________________________。 8、一对齿数不同的非标准渐开线齿轮传动,小齿轮通常采用____________变位。 9、_______________机构能将摇杆的连续摆动变成从动件的单向间歇转动。