永磁无刷电动机系统发展现状
莫会成
(西安微电机研究所,西安710077)
来源:永磁电机会议论文集,编辑:闫晶芬
摘要:永磁无刷电动机系统是以电机为控制对象,以控制器为核心,以电力电子功率变换装置为执行机构的电气传动控制系统。随着电机技术、控制理论、数字脉宽调制技术、新材料技术、微电子技术及现代控制技术的进步,伺服系统经历了从步进伺服到直流伺服,进而到永磁无刷电机伺服系统的发展历程,目前已成为电机控制技术的主流方向。
1 系统组成
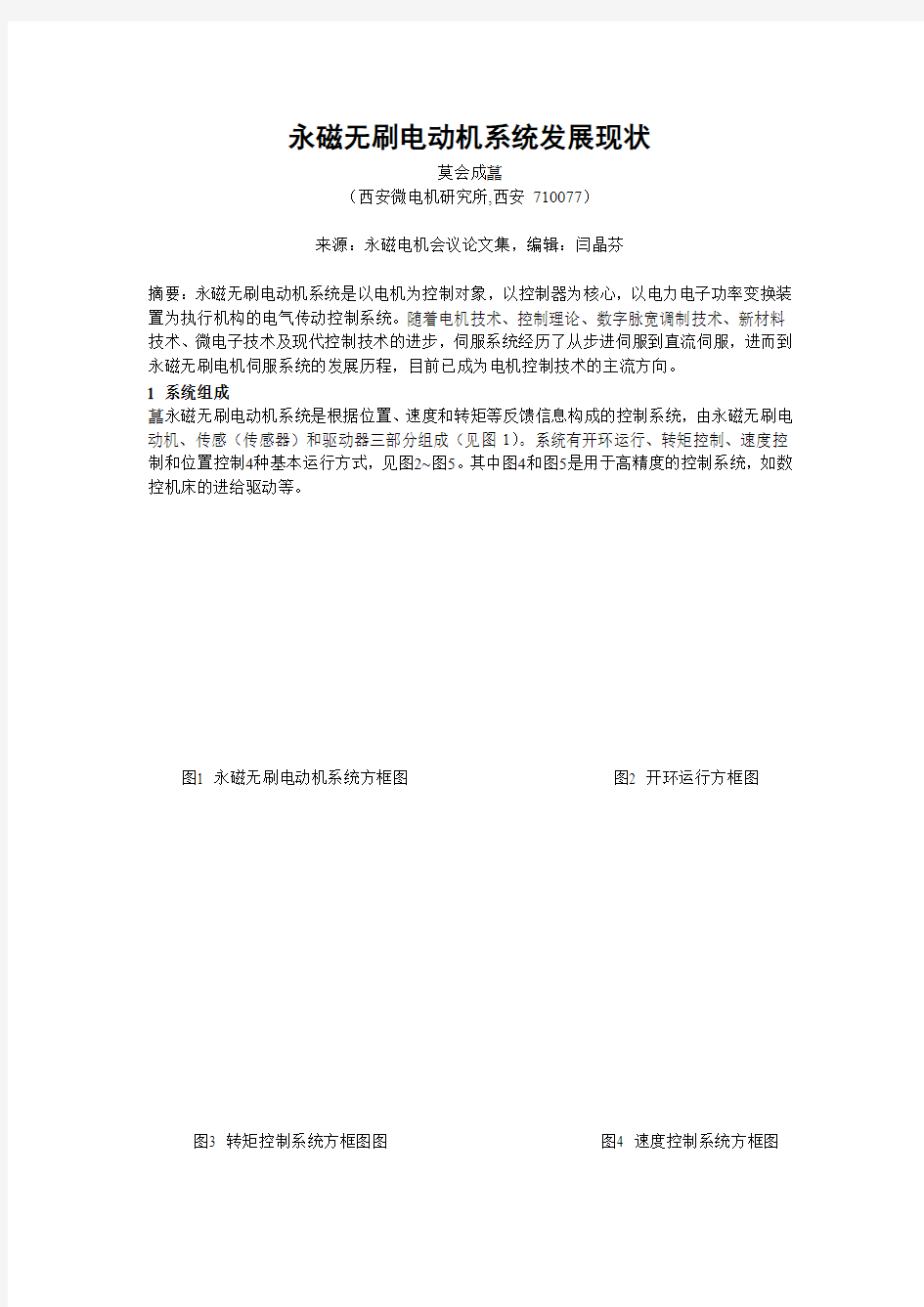
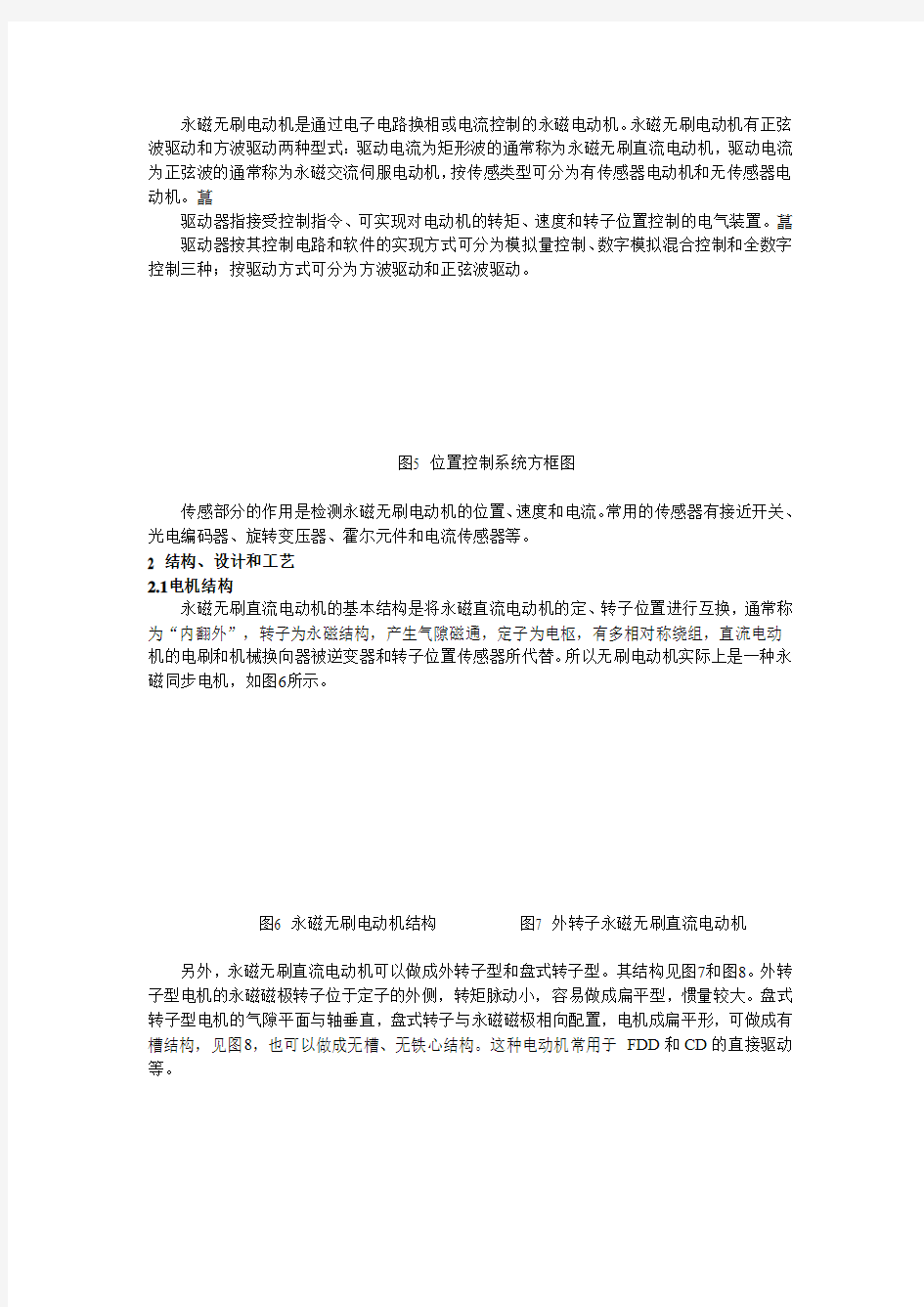
永磁无刷电动机系统是根据位置、速度和转矩等反馈信息构成的控制系统,由永磁无刷电动机、传感(传感器)和驱动器三部分组成(见图1)。系统有开环运行、转矩控制、速度控制和位置控制4种基本运行方式,见图2~图5。其中图4和图5是用于高精度的控制系统,如数控机床的进给驱动等。
图1 永磁无刷电动机系统方框图图2 开环运行方框图
图3 转矩控制系统方框图图图4 速度控制系统方框图
永磁无刷电动机是通过电子电路换相或电流控制的永磁电动机。永磁无刷电动机有正弦波驱动和方波驱动两种型式:驱动电流为矩形波的通常称为永磁无刷直流电动机,驱动电流为正弦波的通常称为永磁交流伺服电动机,按传感类型可分为有传感器电动机和无传感器电动机。
驱动器指接受控制指令、可实现对电动机的转矩、速度和转子位置控制的电气装置。
驱动器按其控制电路和软件的实现方式可分为模拟量控制、数字模拟混合控制和全数字控制三种;按驱动方式可分为方波驱动和正弦波驱动。
图5 位置控制系统方框图
传感部分的作用是检测永磁无刷电动机的位置、速度和电流。常用的传感器有接近开关、光电编码器、旋转变压器、霍尔元件和电流传感器等。
2 结构、设计和工艺
2.1电机结构
永磁无刷直流电动机的基本结构是将永磁直流电动机的定、转子位置进行互换,通常称为“内翻外”,转子为永磁结构,产生气隙磁通,定子为电枢,有多相对称绕组,直流电动机的电刷和机械换向器被逆变器和转子位置传感器所代替。所以无刷电动机实际上是一种永磁同步电机,如图6所示。
图6 永磁无刷电动机结构图7 外转子永磁无刷直流电动机
另外,永磁无刷直流电动机可以做成外转子型和盘式转子型。其结构见图7和图8。外转子型电机的永磁磁极转子位于定子的外侧,转矩脉动小,容易做成扁平型,惯量较大。盘式转子型电机的气隙平面与轴垂直,盘式转子与永磁磁极相向配置,电机成扁平形,可做成有槽结构,见图8,也可以做成无槽、无铁心结构。这种电动机常用于FDD和CD的直接驱动等。
图8 盘式转子无刷直流电动机
无刷直流电动机多采用钐钴(SmCo)和钕铁硼(NdFeB)等稀土永磁。常见的转子结构有表面式磁极,嵌入式磁极和环形磁极3种,如图9所示。图9a结构是在铁心表面粘贴径向充磁的瓦片形永磁体,有时也采用矩形小条拼装成瓦片形磁极,以降低制造成本。图9b 结构是在铁心中嵌入矩形永磁体。其优点是一个极距下的磁通由相邻两个磁极并联提供,可以获得较大的磁通。但结构需要作隔磁处理或者采用不锈钢轴。对于高转速运行的电机,图9a和图9b的结构需在转子外表面套一个0.3 mm~0.8 mm的磁性紧圈,防止离心力将磁钢甩出。紧圈材料通常采用不导磁的不锈钢,也可以用环氧无纬玻璃丝带缚扎。图9c结构是在铁心外套上一个整体稀土永磁环。该环形磁体径向充磁为多极,适用于小功率的电机。这种结构的转子制造工艺性较好。
2.2 设计工艺技术发展动向
1)设计手段不断完善
随着计算机技术的发展以及电磁场数值计算、优化设计和仿真技术的不断完善,形成了以电磁场数值计算、等效磁路解析求解、场路结合求解等一整套分析研究方法和计算机辅助分析的设计软件。如Ansoft公司、MagneForce公司、Jmag公司均推出各种类型的电机设计软件,以方便快捷地完成从电机的电磁设计计算、损耗计算、优化设计、噪声抑制、特性分析等。针对无刷电机特点,提供多种转子类型、多种绕组型式及主电路的连接方式,以便组合。2006年三季度,加拿大以电磁计算分析著名的Infolytica公司,推出了专门针对永磁无刷电机的Motorsolve设计软件。
图9 无刷直流电动机转子结构形式
这些软件除了对电机进行电磁设计,还可对电机在槽形、绕组、材料等设计变量改变情况下多方案比较分析、电磁场精确计算和电机多目标优化设计,并包括控制电路、控制算法在内的整个设计流程,既可以提供任意时刻电机内电磁场分布数据,又能对电机工作时所关心的各类运行曲线,如转矩、转速、电流、功率、效率等提供结果,同时还能提供齿槽转矩、转矩脉动、转速波动等详细指标参数,并可完成电机的各类正常工况和故障工况的仿真实验,包括起动、堵转、突加突减负载、突然短路等等。
2)分数槽技术应用日益增多
分数槽绕组技术在永磁无刷电动机中的应用已逐渐增多。如在电动自行车电机中采用三相、40极、36槽;Collmorgen公司Goldline系列交流伺服电机采用4极、18槽,6极、24槽等;松下伺服电机采用6极、9槽,8极、12槽等每极每相槽数q=1/2的分数槽绕组结构。
对于多极的无刷电动机采用分数槽绕组,可以较少的定子槽数达到多槽能达到的效果。采用分数槽绕组有以下优点:
a)电机电枢槽数大为减少,有利于槽利用率的提高;
b)较少数目的元件数,可简化嵌线工艺和接线,有助于降低成本;
c)有可能得到线圈节距y=1的设计(集中绕组),便于采用自动绕线机绕制,提高工效;同时各个线圈端部没有重叠,不必设相间绝缘;
d)线圈周长和绕组端部缩短,电动机绕组电阻减小,铜损随之也减低,提高了电动机的性能。采用分数槽绕组的磁动势谐波远大于整数槽绕组,如图10所示。
图10 整数槽绕组与分数槽绕组(q=1/2)时的反电动势比较3)无槽、无铁心结构电机
无铁心无刷电动机的出现是采用新材料、新工艺的结果。电枢采用耐热性能优越的材料制成刚性整体,可以在高温及高速情况下长期稳定运行;由于电枢无铁心,电感小,完全消除了铁心中的磁滞损耗和涡流损耗,消除了由齿槽效应带来的转矩波动,具有优异的控制性能;运行效率高、温升低、转速范围广;电机的电枢中无齿槽且采用全塑封结构,负载动行时,噪声及振动都很低。
无铁心无刷电机可采用轴向磁场结构和径向磁场结构。轴向磁场结构的电机电枢绕组径向按一定规律分布,在专用模具中固化成形,电枢两侧均为盘状转子体,转子磁体为轴向磁化,两侧转子可同时布置永磁体磁极及转子轭,成双励磁转子结构,也可一侧布置永磁体磁极而另一侧布置转子磁轭,成单励磁转子结构。径向磁场结构电机的电枢绕组轴向按一定规律分布成筒状,其电枢内、外圆处均为筒状转子体,转子磁极为径向磁化,内、外圆可同时布置永磁体磁极及转子轭,成双励磁转子结构,也可在其中一个圆周上布置永磁体磁极,而另一圆周上只布置转子磁轭,成单励磁转子结构。径向磁场结构和轴向磁场结构均可根据要求制造成内转子和外转子结构。图11为径向磁场结构的无铁心无刷电动机典型结构。
图11 无铁心无刷电动机结构图图12 分割型定子冲片和铁心
典型盘式无刷电动机定子、转子均为圆盘形,采用轴向气隙磁场,可做成有铁心和无铁心两种结构,定子绕组呈径向分布。
无槽结构无刷电动机消除了齿槽效应,具有转矩波动小、运行平稳、噪声低、电枢电感小、定位干扰力矩小等一系列优点,成为很有发展前景的无刷电动机。
小直径的电动机,无槽结构能获得比有槽结构更大的转矩指标;在特殊条件下,例如要求电动机的转矩和功率相对不大,对电动机的体积限制不严,而对电动机的控制要求很高的情况下,采取无槽结构会获得好的效果。
国内无槽无刷电动机已有系列产品,功率范围至30 kW,最高转速可达20 000 r/min。
4)工艺不断革新
在电机制造方面,通过对传统工艺的不断革新,出现了分割型定子铁心结构和连续绕线工艺方法。采用多极集中绕组,减少绕组端部长度,以适应生产自动化,使产品向低成本、低价格方向发展。同时出现了适应不同性能参数永磁材料的瓦型、环型表面粘接结构和各种不同设计嵌入式磁体结构等新的转子磁路结构。
对于节距y=1分数槽设计,用专用绕线机直接绕制定子线圈,对于外转子结构的电机比较方便,但对于内转子结构的电机,特别是定子内径小的小功率电机,就要困难得多了。为此,分割型定子铁心结构的构思提出来了。图12所示为一种新型定子铁心结构,把定子铁心每齿分割开来,可以在铁心展开的状态下绕制线圈,以便随时调整线圈,实现规则绕制。绕圈绕制完成后,再把全部磁极对接成圆,形成一个完整的定子。这时,电枢槽的利用率可达85%以上。
日本松下生产的永磁交流伺服电动机最早采用上述新工艺,生产效率大大提高,产品体积大为减小,性能也有质的提升。以400 W为例,定子外径从最早的φ125 mm减小到φ56 mm,效率由最早的70%提高到85%,温升为80K。
3传感与传感器技术
3.1转子磁场位置传感器
在无刷直流电动机中,常用的位置传感器有以下几种。
1)电磁式位置传感器
电磁式位置传感器是利用电磁效应来检测转子位置,有开口变压器、接近开关电路等;使用较多的是开口变压器。
电磁式位置传感器具有输出信号强、工作可靠、寿命长、适应性强、对环境要求不高等优点,多用于航空航天领域,但体积较大,信噪比较低,同时,其输出波形为交流,需整流、滤波方可使用,因而限制了它在普通条件下的应用。
2)磁敏式位置传感器
常见的磁敏式位置传感器由霍尔元件或霍尔集成电路构成。霍尔元件位置传感器由于结构简单、性能可靠、成本低,是目前应用最多的一种位置传感器。
霍尔元件所产生的电动势很低,往往需要外接放大器,很不方便,随着半导体技术的发展,将霍尔元件与附加电路封装成三端模块,构成霍尔集成电路。霍尔集成电路有开关型和线性型两种,通常用开关型作为位置传感器。
3)光电式位置传感器
光电式位置传感器由安装在电机转子上的遮光盘和固定不动的光电开关组成。其原理如图13所示。遮光盘上开有150°电角度的扇形开口,扇形开口的数目等于无刷直流电机转子磁极的极对数。4极电机所用遮光盘如图13。光电开关通常采用将发光二极管和光敏三极管封装在一起的光断续器。
图13 光电传感器
对于两相导通星形三相六状态无刷直流电动机,3个光电开关在空间依次相差120°电角度,光电开关与电枢绕组的相对位置以及遮光盘与转子磁极的相对位置类似于霍尔位置传感器。
4)对于高精度无刷伺服系统,用于速度和位置反馈的传感器有:
(1)光学绝对式编码器
绝对式编码器的精度由光电码盘的机械位置决定,不受停电等干扰影响;由机械位置决定的每个位置是唯一的,无需记忆,无需找参考点,而且不用一直计数,数据的可靠性大大提高了。
(2)光学增量式编码器
增量编码器的特点是每产生一个输出脉冲信号就对应一个增量位移角,不能直接检测出轴的绝对角度。常选用的分辨率为每转2500个脉冲。
(3)无刷旋转变压器+R/D变换器
无刷旋转变压器是一种精密角度、位置、速度检测元件,适用于高温、严寒、潮湿、高速、高振动等旋转编码器无法正常工作的场合。无刷旋转变压器是一种输出电压随转子转角变化的信号元件。无刷旋转变压器的精度主要由函数误差和零位误差衡量。其精度高于自整角机。
(4)感应同步器
感应同步器是利用两个平面形绕组的互感随位置不同而变化的原理制做的;可用来测量直线和转角位移;测量直线位移的称长感应同步器,测量转角位移的称圆感应同步器。感应同步器的优点是分辨率高、抗干扰能力强、寿命长,维护简便。
(5)无刷测速发电机。
用于精度要求不高的无刷伺服系统的速度和位置传感器有:
(1)磁阻旋转变压器;
(2)磁电式脉冲测速发电机;
(3)磁性编码器;
此外,在经济型系统中,还有利用转子磁场位置信号经倍频处理或利用在电机槽中放置线圈的简易型测速发电机作速度和位置检测的方式。。
3.2 无位置传感器检测技术
1)利用反电动势检测转子位置
按照无刷直流电动机工作原理,必须要有转子磁极位置信号来决定电子开关的换相。目前,大多数采用安装位置传感器(例如霍尔元件)方法来得到这些信号。它有必须占用电机一些空间,安装位置要准,需较多引出线,影响可靠性,在某些场合,如压缩机内的高温高压环境,不允许安放霍尔元件。为此,80年代以来,微机控制技术的快速进展,出现了各种称为无位置传感器控制技术方法,是当代无刷直流电动机控制研究热点之一。它从电子电路以软件方法获得转子磁极位置信号,实现电子换相。在诸多方法中,以反电势法较成功。它
检测不激励相绕组的反电势过零点,经过运算后,决定换相时刻。这也是硬件软件化的一个成功例子。
反电动势法的缺陷是当电机在静止或低速运行时,反电动势为0或太小,因而无法利用,一般采用专门的起动电路,使电机以他控变频方式起动,当电机具有一定的初速度和电动势后,再切换到自控变频状态。这个过程称为三段式起动,包括转子定位、加速和运行状态切换三个阶段。
2)续流二极管检测法
通过对逆变器开关管施加特殊时序的斩波控制信号,使电机绕组的续流电流沿着特定的回路流通,当断开相绕组的反电动势过零时,与断开相开关管并联的续流二极管中将流过续流电流,通过对该续流二极管导通与否的检测就可以确定出绕组反电动势的过零点,从而得到电机的转子位置信号。
这种检测方法实际检测的也是绕组的反电动势,但是检测的灵敏度相对较高,在电机额定转速的2%以上有效,起动容易、调速比大,缺点是实现电路稍复杂一些。
3)瞬时电压方程法
利用电机各相瞬时电压和电流方程,实时计算电机由静止到正常运转任一时刻转子的位置,控制电机的运行。该方法不需专门的起动线路,电路简单、起动转矩大,但对电机本体的数学模型依赖性大,当电机参数因温度变化发生漂移时,容易造成建模误差,使控制精确性受到影响;另外,由于在线计算复杂,计算量很大,考虑到转子位置检测的实时性,必须采用具有快速运算能力的DSP和高速A/D转换器。
4)脉冲注入法
转子位置的不同使电机磁场的分布也不同。该方法采用脉冲注入检测无刷电机静止状态下的转子位置,通过依次向定子绕组注入一系列脉冲,根据测量得到的电流峰值判断转子位置。该方法对电机参数的依赖性低。
4控制技术发展动向
4.1 DSP的应用促进了无刷电动机系统技术发展
1)DSP的特点
随着技术进步和用户对电机控制器的运算速度、数据处理能力、控制精度和实时性提出了更高的要求,过去单纯的靠开、停时间长短或单片机来控制电机运行的方式已不能满足实际需要;特别是对于采用矢量变换控制的系统,由于需要处理的数据量大,对系统的实时性和精度要求较高,单片机往往不能满足要求。
与单片机相比,DSP器件集成度较高,CPU速度较快,存储器容量更大,更适用于电动机的变速驱动控制,同时可以提高系统的性能,降低成本和功耗,简化外围电路的设计工作。因此,为了达到电机控制不断增加的计算量和速度要求,更好地发挥电机的运行性能,具有强大数字信号处理功能的DSP芯片应运而生。DSP技术的应用使现代控制理论中先进而复杂的算法得以实现。DSP芯片的飞速发展促进了无刷电机控制技术的发展与创新。
DSP把现实生活中的各种模拟信号转换成数字信号,再用数学计算方法来处理这些数字信号并得到相应结果。数字信号处理的主要任务是完成大量的实时计算。例如在DSP中常用的FIR滤波和FFT快速算法。
DSP芯片是一种特别适用于数字信号处理的微处理器。它强调对数据进行运算处理的实时性,除具备普通微处理器强调的快速计算和控制功能,在芯片结构、数据流程和指令系统方面有较大改进。例如:采用哈佛结构及改进的哈佛结构,比传统的冯·诺依曼结构具有更高的指令执行速度,更适于处理具有高度实时要求的数字信号。广泛采用流水线技术,加快指令执行速度,增强了处理器处理数据的能力。采用多总线结构,解决了传统芯片的总
线冲突问题,大大提高了系统的速度和效率。可以在一个周期内同时访问数据和程序存储空间,解决了传统芯片的总线冲突问题,大大提高了系统的速度和效率。快速的中断处理能力和硬件I/O接口支持。
2)DSP在无刷电机控制中的应用
(1)DSP技术在无刷电机控制中的发展
20世纪80年代,数字信号处理技术开始应用于电机控制领域,其主要用来直接控制感应电机的磁通量和转矩,以达到对电机转矩进行快速、高性能的控制。典型的产品代表为TI 公司的TMS32010。但由于以前数字信号处理器芯片的价格较高,人们对其在电机控制中的应用也没有给予足够的重视,这种芯片主要用在通讯、图像处理等领域,而在电机控制中的应用较少,后来由于数字信号处理器芯片的性价比不断提高,而且其强大的数字信号处理能力越来越受到用户的欢迎,DSP的应用得到了较快的发展。
尽管最初把DSP技术应用于电机控制的目的是其快速的数据处理能力能够对电机进行矢量控制和直接转矩控制,使复杂的算法得以实现,但以前的DSP芯片没有集成数模转换和脉宽调制等外围电路,芯片只是作为在算法上比MCU占优势的通用处理器来使用,大大增加了系统的体积和产品的成本,增加系统设计的复杂性,延长开发周期,降低系统工作的可靠性。
(2)典型的DSP芯片在无刷电机控制中的应用
·TI系列DSP芯片
TI公司于1998年推出的TMS320F240是电机控制领域一个划时代的进步。芯片的执行速度很快,在20 MHz的时钟频率下,指令周期仅为50 ns,且多数指令都能在一个指令周期内完成,片内具有Flash ROM。内部有16通道两路转换精度为10位的AD变换器,转换时间仅为6.6μs。在电机调速系统构成电流闭环时,反馈电流信号可以经AD输入CPU处理。另外,TMS320F240还提供28个I/O口,用于控制系统所需的各种开关量。芯片内集成的事件管理器(EV)具有控制三个半高桥的能力,当各个桥需要互补的PWM去控制时,EV可以提供这种功能,极大地方便了电机控制系统的设计。它是专门用于电机控制的模块。
·AD系列DSP芯片
AD公司推出基于16位26MIPS定点DSP核ADSP2171的ADMC300、330、331电机控制芯片,把数字信号处理器和外围电路结合在一起,集成了16位三相PWM发生器、存储器,串行通讯口,定时器等外围器件,还具有7路模拟量的输入通道,用户不必在外围再设置模数转换器,从而降低成本,提高系统工作的可靠性。采用ADSP2100系列的代码兼容语言,使程序的移植非常方便,缩短了产品的开发周期,工作量大大减少。
AD公司开发的电机控制DSP芯片ADMC401具有一套完备的外围控制接口和丰富的电机控制外设电路,增强了DSP的快速运算能力,可以在高度集成的环境中对电机进行控制。它的基本控制外设电路是带有8路模拟量输入的模/数转换系统、光电编码器接口单元和灵活、简便的脉冲宽度调制单元,可以输出6路PWM信号,以控制逆变器功率开关的动作,借助于快速、高精度的模/数转换系统和控制器来监视和调控电机的运行。ADMC401芯片可广泛应用于控制交流电机、直流电机及开关磁阻电机等。
·Motorola系列DSP芯片
Motorola公司研制的DSP56F8xx系列集成了Motorola 16位定点DSP微控制器内核DSP56800。芯片内核最高可工作于80 MHz,指令执行速度可达40MIPS,单指令周期可以完成16×16位的并行乘、加运算,支持16位双向循环移位。芯片内集成相位检测器和PWM模块,提供硬件循环操作,具有JTAG程序调试接口,允许在系统设计过程中随时进行实时调试,非常适用于电机的实时控制。DSP56F8xx系列芯片可以实现复杂的算法并降低产品成本,提高系统的可靠性与稳定性,可用于控制交流感应电机、有刷直流及无刷电机、有传感
器及无传感器电机、可变磁阻电机及步进电机等。
4.2 控制理论的发展
1)基于稳态模型的标量控制
交流电动机最初的运行方式是不受控运行。其控制功能仅限于接通和关断以及某些情况下的辅助起动、制动和反转。为了满足一些调速传动的需要,产生了一些性能较差的控制:如鼠笼异步电动机降压调速、绕线式异步电动机转子串电阻调速和电磁转差离合器调速、绕线式异步电动机串极调速、鼠笼异步电动机变压变频调速(VVVF)、变极调速和同步电机变压变频调速。在以上调速方法中,除变压变频调速外,一般为开环控制,不需变频器,设备简单,但效率低,性能差。鼠笼异步电动机基于恒压频比控制而构成的转差频率闭环控制,性能相对较好,但由于它们都是基于稳态模型,动态性能较差,一般只用于水泵、风机等动态性能要求较低的节能调速和一般调速场合。
2)矢量控制
1971年由德国学者Blaschke提出的矢量控制理论使交流电机控制由外部宏观稳态控制深入到电机内部电磁过程的瞬态控制。永磁同步电机的控制性能由此发生了质的飞跃。矢量控制最本质的特征是通过坐标变换将交流电机内部复杂耦合的非线性变量变换为相对坐标系为静止的直流变量(如电流,磁链,电压等),从中找到约束条件,获得某一目标的最佳控制策略。
3)直接转矩控制
1985年,Depenbrock教授提出异步电机直接转矩控制方法。该方法在定子坐标系下分析交流电机的数学模型,在近似圆形旋转磁场的条件下强调对电机的转矩进行直接控制,省掉了矢量坐标变换等复杂的计算。其磁场定向应用的是定子磁链,只需知道定子电阻就可以把它观测出来,相对矢量控制更不易受电机参数变化的影响。近年来,直接转矩控制方式被移植到永磁同步电机的控制中,其控制规律和关键技术正逐渐被人们了解、掌握。直接转矩控制在全数字化、大转矩、快速响应的交流伺服系统中有广阔应用前景。
4)非线性控制
交流电机是一个强耦合、非线性、多变量系统:非线性控制通过非线性状态反馈和非线性变换,实现系统的动态解耦和全局线性化,将非线性、多变量、强耦合的交流电动机系统分解为两个独立的线性单变量系统。其中转子磁链子系统由两个惯性环节组成。两个子系统的调节按线性控制理论分别设计,以使系统达到预期的性能指标。
但是,非线性系统反馈线性化的基础是已知参数的电动机模型和系统的精确测量或观测,而电机在运行中,参数受各个因素的影响会发生变化,磁链观测的准确性也很难论证,这些都会影响系统的鲁棒性,甚至造成系统性能恶化。目前这种控制方法仍有待进一步完善。 5)自适应控制
自适应控制能在系统运行过程中不断提取有关模型的信息,使模型逐渐完善,是克服参数变化影响的有力手段。应用于永磁交流电机控制的自适应方法有模型参考自适应、参数辨识自校正控制以及新发展的各种非线性自适应控制。但所有这些方法都存在的问题是:①数学模型和运算繁琐,使控制系统复杂化;②辨识和校正都需要一个过程,所以对一些参数变化较快的系统,就会因来不及校正而难以产生很好的效果。
6)滑模变结构控制
滑模变结构控制是变结构控制的一种控制策略,它与常规控制的根本区别在于控制的不连续性,即一种使系统“结构”随时变化的开关特性。其主要特点是,根据被调量的偏差及其导数,有目地的使系统沿设计好的“滑动模态”轨迹运动。这种滑动模态是可以设计的,且与系统的参数及扰动无关,因而使系统具有很强的鲁棒性。另外,滑模变结构控制不需要任何在线辨识,所以很容易实现。在过去10多年里,将滑模变结构控制应用于交流传动一直
是国内外学者的研究热点,并已取得了一些有效的结果。但滑模变结构控制本质上的不连续开关特性使系统存在“抖振”问题。主要原因是:①对于实际的滑模变结构系统,其控制力总是受到限制的,从而使系统的加速度有限;②系统的惯性、切换开关的时间空间滞后及状态检测的误差,特别对于计算机的采样系统,当采样时间较长时,形成“准滑模”等。所以,在实际系统中“抖振”必定存在且无法消除,这就限制了它的应用。
7)智能控制
(1)专家系统智能控制
专家控制(Expert control)是智能控制的一个重要分支。专家控制的实质是基于控制对象和控制规律各种知识,并以智能方式利用这些知识使控制系统尽可能优化。
专家控制的基本思想是:自动控制理论+专家系统技术。自动控制系统中存在大量的启发式逻辑,这是因为工业控制对象及其环境的变化呈现出多样性、非线性和不确定性,这些启发式逻辑实际上是实现最优控制目标的各种经验知识,难以用一般的数值形式描述,而适于用符号形式来表达,人工智能中的专家系统技术恰恰为这类经验知识提供了有效的表示和处理方法。
知识库和推理机为专家系统的两大要素,知识库存储某一专门领域的专家知识、条目,推理机制按照专家水平的问题求解方法调用知识库中的知识条目进行推理、判断和决策。专家系统与传统自动控制理论的结合,形成了专家控制系统,这类系统以模仿人类智能为基础,弥补了以数学模型为基础的控制系统的不足。
目前专家控制的研究大致包括用于传统PID控制和自适应控制的专家控制和.基于模糊规则的控制方法。
(2)模糊逻辑智能控制
模糊逻辑控制实质上是利用计算机模拟人的模糊逻辑思维功能实现的一种数字反馈控制。人的思维具有模糊逻辑的特点,因此用计算机模拟人的模糊思维,即模糊概念、模糊判断和模糊推理,就是模糊控制的思维科学基础,再和反馈控制理论相结合就可以实现模糊控制。
传统的PID控制系统设计中需要给出被控对象的精确模型。模型的不精确性及不确定性都会影响PID控制性能。相反,模糊控制不需要知道被控对象的精确模型,它是基于控制系统输入/输出数据因果关系的模糊推理控制。
模糊控制不是基于被控对象精确模型的控制方式,因此具有较强的鲁棒性,其稳态精度可以通过引进智能积分等方法达到所要求的精度。此外,还可以将模糊逻辑推理和PID控制相结合,对PID控制参数进行自适应调整,实现无静态跟踪伺服控制。
(3)神经网络智能控制
人工神经网络是利用计算机模拟人类大脑神经系统的联接机制而设计的一种信息处理的网络结构,一般简称神经网络(NN)。神经网络中最基本单元是神经细胞,简称神经元。它是一种多输入单输出的信息处理单元,包括输入处理、活化处理和输出处理三个部分。从控制的观点,神经元模型由加权加法器、单输入单输出线性动态系统和静态非线性函数所组成。它们模拟神经细胞综合处理信息的突变性和饱和性的非线性特征。
神经网络是由大量神经元构成网络,能够根据某种学习规则,通过调整神经元之间的联接强度(权重)来不断改进网络的逼近性能,即神经网络具有非常强的非线性映射能力。正因为如此,神经网络在智能控制、模式识别、故障诊断、系统辩识等领域获得了广泛应用。 (4)除了上述的专家系统、模糊伺服控制、神经网络伺服控制策略外,还有遗传算法等控制。
5 结语
永磁无刷电动机系统在运动控制系统中的作用越来越突出,是目前国内外最活跃和最具
发展前途的控制系统。文中首先介绍了系统的组成,对电机技术、设计和工艺以及传感技术和控制技术做了较为详细的论述,并提出发展动向;对于研究人员和管理人员有一定意义。参考文献
[1]王宗鲜,韩光鲜,程智.无刷直流电动机的方波与正弦波驱动[J].微电机,2002,35(6):3-6.
[2]莫会成.方波励磁永磁无刷伺服电动机换向过程分析[J].微电机,1994,27(3):3-7. [3]莫会成.控制电机发展及建设[J].微电机,2005,38(6):74-77.
[4]孙建忠,白风仙.特种电机及其控制[M].北京:中国水利水电出版社,2005.
[5]正田英介(日).电机电器[M].北京:科学出版社,2001.
[6]祝恩国,杨公训,许书阁.引发工业设计革命的DSP技术[J].微电机,2006,39(1):55-57.
[7]莫会成.永磁交流伺服电动机转矩波动分析[J].微电机,2007,40(3):1-4. [8]孟明.现代电气传动技术[C].企业产品国际化战略与微电机技术发展论坛,宁波,西安微电机研究所,宁波,2006,12:16-19.
【9】黄声华.永磁交流伺服系统国内外发展现状[C].微电机工业“十一五”发展论坛,西安微电机研究所,西安,2005,7:13-20。
作者简介:莫会成(1962-),男,研究员级高工,教授,享受国务院特殊津贴专家,从事永磁交流伺服电动机技术研究及技术管理。
永磁无刷直流电动机的基本工作原理 无刷直流电动机由电动机主体和驱动器组成,是一种典型的机电一体化产品。 1. 电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。 无刷直流电动机的原理简图如图一所示: 永磁无刷直流电动机的基本工作原理 主电路是一个典型的电压型交-直-交电路,逆变器提供等幅等频5-26KHZ调制波的对称交变矩形波。 永磁体N-S交替交换,使位置传感器产生相位差120°的U、V、W方波,结合正/反转信号产生有效的六状态编码信号:101、100、110、010、011、001,通过逻辑组件处理产生T1-T4导通、T1-T6导通、T3-T6导通、T3-T2导通、T5-T2导通、T5-T4导通,也就是说将直流母线电压依次加在A+B-、A+C-、B+C-、B+A-、C+A-、C+B-上,这样转子每转过一对N-S极,T1-T6功率管即按固定组合成六种状态的依次导通。每种状态下,仅有两相绕组通电,依次改变一种状态,定子绕组产生的磁场轴线在空间转动60°电角度,转子跟随定子磁场转动相当于60°电角度空间位置,转子在新位置上,使位置传感器U、V、W按约定产生一组新编码,新的编码又改变了功率管的导通组合,使定子绕组产生的磁场轴再前进60°电角度,如此循环,无刷直流电动机将产生连续转矩,拖动负载作连续旋转。正因为无刷直流电动机的换向是自身产生的,而不是由逆变器强制换向的,所以也称作自控式同步电动机。 2. 无刷直流电动机的位置传感器编码使通电的两相绕组合成磁场轴线位置超前转子磁场轴线位置,所以不论转子的起始位置处在何处,电动机在启动瞬间就会产生足够大的启动转矩,因此转子上不需另设启动绕组。 由于定子磁场轴线可视作同转子轴线垂直,在铁芯不饱和的情况下,产生的平均电磁转矩与绕组电流成正比,这正是他励直流电动机的电流-转矩特性。 电动机的转矩正比于绕组平均电流: Tm=KtIav (N·m) 电动机两相绕组反电势的差正比于电动机的角速度: ELL=Keω (V) 所以电动机绕组中的平均电流为: Iav=(Vm-ELL)/2Ra (A) 其中,Vm=δ·VDC是加在电动机线间电压平均值,VDC是直流母线电压,δ是调制波的占空比,Ra为每相绕组电阻。由此可以得到直流电动机的电磁转矩: Tm=δ·(VDC·Kt/2Ra)-Kt·(Keω/2Ra) Kt、Ke是电动机的结构常数,ω为电动机的角速度(rad/s),所以,在一定的ω时,改变占空比δ,就可以线性地改变电动机的电磁转矩,得到与他励直流电动机电枢电压控制相同的控制特性和机械特性。
WORD格式 电机行业国内外研究现状及发展趋势 1、现状 国外公司注重新产品开发,在电机的安全、噪声、电磁兼容等方面很重视。国外的先进水平主要体现在电机的可靠性高,寿命长,通用化程度高,电机效率不断提高,噪声低,重量轻,电机外形美观,绝缘等级采用F级和H级,而且也考虑电机制造成本的降低等国内虽有部分产品已达90年代初的国际水平,但相当部分的产品可靠性差,重量重,体积大和噪声大,综合水平只相当于80年代初期国际水平,其主要原因是制造工艺落后,关键材料的质量和品种不能满足要求,科研和设计工作没有跟上,科研投入少,新产品开发资金匮乏,企业技术创新能力较弱。 2、电机行业发展趋势 新型、特种电机仍将是与新原理;新结构;新材料;新工艺;新方法联系最密切;发展最活跃;也最富想象力的学科分支,并将进一步深入渗透到人类生产和生活的所有领域之中。随着人类生活品质的不断提升,绿色电机的概念已经提出并被人们所接受。虽然这个概念目前还是抽象的,但从环保角度看,低震动;低噪声;无电磁干扰;有再生利用能力以及高效率;高可靠性是一些最起码的要求,这对电机的设计制造和运行控制,尤其是原理;结构;材料;工艺等,无疑是一种新的挑战。此外,随着工业自动化的不断发展,智能化电机或智能化电力传动的概念也被越来越多的人们所认可。这种智能化包含两个方面的内容:其一是系统所具有的控制能力和学习能力,另一方面就是电机的容错运行能力,既要求研制所谓容错型电机。容错型电机的定义还不太确切,其基本要求就是以安全为前提,允许电机在故障和误操作情况下的容错运行,直至故障消除或系统自动控制恢复。这对于传统的电机运行观念,无疑也是一个严峻的挑战。 需要特别强调的是,近代科学技术,特别是计算机技术对电机学科的影响是巨大的,意义是深远的。电机的传统内涵已经发生着极大的变化,研究内容拓宽了,研究方法改进了,研究手段也丰富了。新的观念在形成,新的交叉学科在产生,老学科确实重新焕发了出了生机和魅力。近年来,围绕带电机以及其系统的各类控制设备和计算机应用软件的研制方兴未艾,并已构成电机学科新的发展方向。电机与电力电子技术的结合使得现代电力传动系统的分析必须将电机与系统以及电力电子装置揉成一个整体,由此可形成所谓的“电子电机学”。传统电机学以路(电路;磁路;热路;风路);集中参数;均质等温体,刚体等概念分析处理电机,视电机为系统中的一个元件,若可将之称为“宏观电机学”的话,那么,从综合物理场的角度;用计算 机手段分析处理电机的理论和方法体系就可以称之为“微观电机学”。此外,在我国,“电力电子与电力传动”已经发展称为一门学科。 专业资料整理
电动车用电机及其控制技术的现状及趋势 电动汽车是以车载电源为动力,并采用电动机驱动的一种交通工具。电机及其驱动系统是电动汽车的核心部件之一,由于电动汽车在运行过程中频繁起动和加减速操作,对驱动系统的有着很高的要求。生产制造方面要求电机的可靠性好、结构简单、维修方便、成本低、体积小、重量轻;性能方面要求车用电机具有瞬时功率大、过载能力强、范围宽、续驶里程长等优点。 电动汽车的驱动电机按其类型来划分,可分为直流电机和交流电机两大类。直流电机的驱动特性是在基本转速以下运行于恒转矩区,基本转速以上运行于恒功率区。它的这种特性很适合汽车对动力源低速高转矩、高速低转矩的要求,而且直流电机结构简单,易于平滑调速,所以直到20世纪80年代中期,它仍是国内外的主要研发对象。几乎所有早期的电动车都采用直流电机驱动系统。如日本东京大学的UOT电动汽车采用直流串励电动机,意大利菲亚特公司的900E/E2电动汽车用直流他励电动机驱动,日本马自达汽车公司的BANGO 电动汽车则采用直流并励电动机。但是直流电机的效率和转速相对较低,其换向器维护困难,直流电机价格高、体积和重量大。随着控制理论和电力电了技术的发展,直流驱动系统与其它驱动系统相比,己大大处于劣势。因此,目前国外各大公司研制的电动车电气驱动系统己逐渐淘汰了直流驱动系统。 20世纪90年代后,交流电机驱动系统的研制和开发有了新的突破。相比直流电机,交流电机体积小、质量轻、效率高、调速范围宽、可靠性高、价格便宜、维修简单方便,在电动汽车上得到了广泛应用。交流电机包括异步电机、永磁电机以及开关磁阻电机。 美国以及欧洲研制的电动汽车多采用这种电动机,如Chrysler公司生产的Epic Van; Ford 公司生产的Ranger EV,通用汽车公司生产的IMPACT和EH电动汽车。国内也采用感应电动机作为电动汽车的驱动电机也比较多,如胜利SL6700DD电动客车,郑州华联ZK6820HG-1电动轻型客车。但其最大缺点是驱动电路复杂,相对永磁电机而言,其效率和功率密度偏低,因此有被其它新型永磁电机逐步取代的趋势。 永磁电机包括永磁无刷直流电机和永磁无刷同步电机两种。永磁无刷直流电机是在直流电机的基础上不再用电刷和换向器,起动转矩大、过载能力强,非常适合电动车的运行特性。香港大学研制的U 2001电动车采用的永磁无刷直流电机,最高车速为110krn/h,本田研制EV PLU S电动车采用的永磁无刷直流电机,最高车速为128krn/h。永磁无刷同步电机的恒转矩区比较长,这对提高汽车的低速动力性能有很大帮助,电机最高转速较高,能达到10 000 r/min。永磁无刷同步电机功率密度高调速性能好、在宽转速范围内运行效率高.它的主要缺点是电机造价较高,永磁材料会有退磁效应,要想增大电机的功率其体积会很大。随着稀土永磁材料的开发和应用,永磁无刷电机的性能有了很大的提高,是未来最有发展前景的驱动电机之一。 开关磁阻电机(SRM )是英国于1983年首次正式推出的,经过多年的研制开发,现己成为现代电动汽车交流驱动的又一个新支,它具有可控相数多、实现四象限控制方便、成本低。开关磁阻电机结构和控制简单、出力大,可靠性高,起动制动性能好,运行效率高,但电机噪声高,转矩脉动严重,非线性严重,在电动汽车驱动中有利有弊,目前在电动汽车应用较少。 上述几种电动机各有自己的优势和不足,并各有侧重,'已们在现有的电动汽车中均有应用,其中,交流异步电机主要应用在纯电动汽车(包括轿车及客车),永磁同步电机主要应用在混合动力汽车(包括轿车及客车)中,开关磁阻电机目前主要应用在客车中,而以交流异步电动机和永磁直流电动机的应用稍微居多一些。 要想使电机驱动并发挥出其优良的性能必须与合理的控制策略相配合。目前电机的控制
绪论 近几十年来,随着电力电子技术、微电子技术及现代控制理论的发展,中、小功率电动机在工农业生产及人们的日常生活中都有极其广泛的的应用。特别是乡镇企业及家用电器的迅速,更需要大量的中小功率电动机。由于这种电动机的发展及广泛的应用,它的使用、保养和维护工作也越来越重要。本文主要介绍了电动机技术发展及现状、工作原理、电动机的运行维护。 关键词:机电一体化电动机机械技术微电子技术
第一章我国发展机电一体化面临的形式以及对策第一章机电一体化技术发展历程及其趋势 自电子技术一问世,电子技术与机械技术的结合就开始了,只是出现了半导体集成电路,尤其是出现了以微处理器为代表的大规模集成 电路以后,"机电一体化"技术之后有了明显进展,引起了人们的广泛注意. “机电一体化”这个词是日本安川电机公司在上世纪60年代末作商业注册时最先创用的。当时及70年代,人们一直把机电一体化看作是机械与电子的结合。国内早期将“机电一体化技术”与“机械电子学”并用,近年来“机电一体化”更流行使用。 80年代,信息技术崭露头角。微处理机的性能提高,为更高级的机电一体化产品所采用,典型的机电一体化产品如数控机床、工业机器人和汽车的电子控制系统等。微机作为关键技术引入了飞行器系统后,使机械-电子系统在高度控制、排气控制、振动控制和保险气袋等方面获得广泛应用。 关于“机电一体化”这个名词的起源,说法很多。早在1971年,日本“机械设计”杂志副刊就提出了“Electronics”这一名词,从图47.6-1可见它是融合机械技术、电子技术、信息技术等多种技术为一体的新兴的技术。采用机电一体化技术设计和制造出的产品,称之为机电一体化产品。
直流电机调速电路发展、现状以及前景综述 摘要:在现代化的工业生产过程中,几乎无处不使用电力传动装置,生产工艺、产品质量的要求不断提高和产量的增长,使得越来越多的生产机械要求能实现自动调速。对可调速的电气传动系统,可分为直流调速和交流调速。直流电动机具有优良的调速特性,调速平滑、方便,易于在大X围内平滑调速,过载能力大,能承受频繁的冲击负载,可实现频繁的无级快速起制动和反转,能满足生产过程自动化系统中各种不同的特殊运行要求,至今在金属切削机床、造纸机等需要高性能可控电力拖动的领域仍有广泛的应用,所以直流调速系统至今仍然被广泛地应用于自动控制要求较高的各种生产部门,是截止到目前为止调速系统的主要形式。 关键词:直流电机;调速系统;直流电机应用;自动控制 直流电机发展状况: 直流电动机分为有换向器和无换向器两大类。无刷直流电机是在有刷直流电机的基础上发展起来的。1831年法拉第发现了电磁感应现象,奠定了现代电机的理论基础。十九世纪四十年代研制成功了第一台直流电机,经过约七十年,直流电机才趋于成熟阶段。随着用途的扩大,对直流电机的要求也越来越高,显然,有接触的换向装置限制了有刷直流电机在许多场合的应用,为了取代有刷直流电机的那种电刷——换向器结构的机械接触装置,人们曾经对此做过长期的探索。早在1915年,美国人Langmil发明了控制栅极的水银整流器,制
成了由直流变交流的逆变装置;20世纪30年代,有人提出用离子装置实现电机的定子绕组按转子位置换接的所谓整流子电机,此种电机由于可靠性差、效率低、整个装置笨重而又复杂,故无实际意义。 科学技术的迅猛发展,带来了半导体技术的飞跃。开关型晶体管的研制成功,为创造新型电机——无刷直流电机带来了生机。 1955年美国D.Harrison等人首次申请用晶体管换向线路代替电机电刷接触的专利,这就是无刷直流电机的雏形,它由功率放大部分、信号检测部分、磁极体和晶体管开关电路等所组成。其工作原理是是:当子旋转时,在信号绕组W1或W2中感应出周期性的信号电势,此信号分别使晶体管BG1和BG2轮流导通,这样就使功率绕组W1和W2轮流馈电,即实现了换流。问题在于,首先,当转子不转时,信号绕组内不产生感应电势,晶体管无偏置,功率绕组也就无法馈电,所以这种无刷电机没有起动转距;其次,由于信号电势的前沿陡度不大,晶体管的功耗大。为了克服这些弊端,人们采用了离心装置的换向器,或在定子上放置辅助磁钢的方法来保证电机可靠的起动,但前者结构复杂,而后者尚需要附加的起动脉冲;其后,经过反复的实验和不断的实践,人们终于找到了用位置传感器和电子换向线路来代替有刷直流电机的机械换向装置,从而为无刷直流电机的发展开辟了新的途径。六十年代初期,以接近某物而动作的接近开关式位置传感器、电磁谐振式位置传感器和高频耦合式位置传感器相继问世,之后,又出现了磁电耦合式和光电式位置传感器。 半导体技术的飞速发展,使人们对1879年美国人霍尔发现的霍
H a r b i n I n s t i t u t e o f T e c h n o l o g y 课程学术报告 课程名称:电机与电器学科最新发展动态设计题目:电机驱动技术的发展现状及前 景展望 姓名:王胤燊 学号:11S006014 指导教师:梁维燕院士邹继斌教授 杨贵杰教授翟国富教授时间:2012.7.10 哈尔滨工业大学
电机驱动技术的发展现状及前景展望 王胤燊 (哈尔滨工业大学电气工程系,黑龙江哈尔滨150001) 摘要:一个多世纪以前电动机的发明使其成为工业革命以后的主要驱动力之一。它在各种机械运动中的广泛应用使生活变得简单并最终推动了人类的进步。逆变器的出现推动了交流电机速度和转矩控制的发展,这使得电机在仅仅30年就应用到了不可思议的领域。功率半导体元件和数字控制技术的进步使得电机驱动具有了鲁棒性并且能够实现高精度的位置和速度控制。交流驱动技术的应用也带来了能源节约和系统效率的提高。这篇文章回顾了交流电机逆变技术的发展和应用中所起的作用,并介绍了电机驱动技术的发展前景。未来更有效更强劲的电机驱动技术的发展对于实现不污染电网系统和提高生产力这样的节能环保型驱动很重要。 PRESENT STATE AND A FUTURISTIC VISION OF MOTOR DRIVE TECHNOLOGY W ANG Yinshen, (Dept of Electrical Engineering, Harbin Institute of Technology, Harbin 150001, China) Abstract:One of the main driving force behind the industrial revolution was the invention of the electric motor more than a century ago. Its widespread use for all kinds of mechanical motion has made life simple and has ultimately aided the advancement of human kind. The advent of the inverter that facilitated speed and torque control of AC motors has propelled the use of electric motor to new realms that was inconceivable just a mere 30years ago. Advances in power semiconductors along with digital controls have enabled realization of motor drives that are robust and can control position and speed to a high degree of precision. Use of AC motor drives has also resulted in energy savings and improved system efficiency. This paper introduces some futuristic vision for the motor drive technology. The development of more efficient, more powerful electric motor drives to power the demands of the future is important for achieving energy savings, environmentally harmonious drives that do not pollute the electrical power system, and improving productivity. 1引言 电机本体及其控制技术在近几年取得相当大的进步。这要归功于半导体技术的空前发展带来的电力电子学领域的显著进步。电机驱动产业发展的利处已经触及各种各样的设备,从大型工业设备像钢铁制造厂、造纸厂的轧钢机等,到机床和半导体制造机中使用的机电一体化设备。交流电机控制器包括异步电机控制器和永磁电机控制器,这两者在电机驱动业的全过程中起着关键性作用。图1所示为电流逆变器(异步电机控制器)和交
机电一体化毕业论文
摘要 作为机电系的一名学生,将来工作学习都会以机电为主,所以必须掌握好各种机电的专业知识。我会本着认真的态度对待专业课的学习,提高自己的专业素养.接下来我将介绍一下我对电动机发展史的认识 关键词:机电一体化电动机机械技术微电子技术
目录 绪论 --------------------------------------------------------------4 第一章我国发展机电一体化面临的形式以及对策----------------------5 一、机电一体化技术发展历程及其趋势------------------------5 二、典型机电一体化产--------------------------------------7 三、我国发展“机电一体化”面临的形式和任务----------------7 四、我国发展“机电一体化”的对策--------------------------9 第二章电动机的发展及工作原理------------------------------------11 一、电动机技术发展及现状----------------------------------11 二、电动机工作原理----------------------------------------12 三、电动机的维护------------------------------------------13. 四、结论--------------------------------------------------16 致谢---------------------------------------------------------------17 参考文献-----------------------------------------------------------18
通常说的交流永磁同步伺服电机具有定子三相分布绕组和永磁转子,在磁路结构和绕组分布上保证感应电动势波形为正弦,外加的定子电压和电流也应为正弦波,一般靠交流变压变频器提供。永磁同步电机控制系统常采用自控式,也需要位置反馈信息,可以采用矢量控制(磁场定向控制)或直接转矩控制的先进控制方式。 两者区别可以认为是方波和正弦波控制导致的设计理念不同。最后明确一个概念,无刷直流电机的所谓“直流变频”实质上是通过逆变器进行的交流变频,从电机理论上讲,无刷直流电机与交流永磁同步伺服电机相似,应该归类为交流永磁同步伺服电机;但习惯上被归类为直流电机,因为从其控制和驱动电源以及控制对象的角度看,称之为“无刷直流电机”也算是合适的。 无刷直流电机通常情况下转子磁极采用瓦型磁钢,经过磁路设计,可以获得梯形波的气隙磁密,定子绕组多采用集中整距绕组,因此感应反电动势也是梯形波的。无刷直流电机的控制需要位置信息反馈,必须有位置传感器或是采用无位置传感器估计技术,构成自控式的调速系统。控制时各相电流也尽量控制成方波, 逆变器输出电压按照有刷直流电机PWM的方法进行控制即可。 本质上,无刷直流电动机也是一种永磁同步电动机,调速实际也属于变压变频调速范畴。通常说的永磁同步电动机具有定子三相分布绕组和永磁转子,在磁路结构和绕组分布上保证感应电动势波形为正弦,外加的定子电压和电流也应为正弦波,一般靠交流变压变频器提供。永磁同步电机控制系统常采用自控式,也需要位置反馈信息,可以采用矢量控制(磁场定向控制)或直接转矩控制的先进控制 策略。 两者区别可以认为是方波和正弦波控制导致的设计理念不同。 最后纠正一个概念,“直流变频”实际上是交流变频,只不过控制对象通常称之为“无刷直流电机”。 仅对电机结构而言,二者确实相差不大,个人认为二者的区别主要在于: 1 概念上的区别。无刷直流电机指的是一个系统,准确地说应该叫“无刷直流电机系统”,它强调的是电机和控制器的一体化设计,是一个整体,相互的依存度非常高,电机和控制器不能独立地存在并独立工作,考核的也是他们整体的技术性能。而交流永磁同步电机指的是一台电机,强调的是电机本身就是一台独立的设备,它可以离开控制器或变频器而独立地存在独立地工作。 2 从设计和性能角度上看,“无刷直流电机系统”设计时主要考虑将普通的机械换向变为电子换向后如何还能保持机械换向电机的优点,考核的重点也是系统的直流电机特性,如调速特性等;而交流永磁同步电机设计主要着重电机本身的性能,特别是交流电机的性能,如电压的波形、电机的功率因数、效率功角特性等。 3 从反电势波形看,无刷直流电机多为方波,而交流永磁同步电机反电势波形多为正弦波。 4 从控制角度看无刷直流电机系统基本不用什么算法,只是依据转子位置考虑给那个绕组通电流即可,而交流永磁同步电机如果需要变频调速则需要一定的算法,需要考虑电枢电流的无功和有功等。 5 关于“那么三相无刷直流电机能不能使用三相正弦交流电呢如果可以,霍耳器件是否可以不用了” 从原理上讲,三相无刷直流电机使用三相正弦交流电是可以运行的,只不过是运行性能可能很差,如果三相无刷直流电机的反电势波形为方波,则使用三相正弦交流电时会产生很大的谐波损耗,温升很高。是否需要霍耳器件与使用什么电源(三相正弦交流电或方波脉冲电源)无关,而与电机的控制算法、控制策略及控制方式等因素有关,如果是用无位置传感
摘要 电动汽车具有清洁无污染,能源来源多样化,能量效率高等特点,可以解决能源危机和城市交通拥堵等问题。电动车作为国家“十二五规划”重点发展的节能环保项目,获得了广泛应用和发展。无刷直流电机用电子换向装置取代了普通直流电动机的机械换向装置,消除了普通直流电机在换向过程中存在的换向火花,电刷磨损,维护量大,电磁干扰等问题,成为了电动车驱动电机的主流选择。本文将采用基于空间电压矢量脉宽调制技术(SVPWM)的正弦波驱动无刷直流电机的方法来解决方波控制下的无刷直流电机启动抖动明显,动矩脉动大,噪声大等问题。控制系统实现了永磁无刷直流电机在不同负载下低转矩纹波,运动平滑,噪音小,启动迅速,效率高的运行效果。 本文主要研究内容如下: 1.对永磁无刷直流电机数学模型与矢量控制工作原理分析,首先对永磁无刷直流电机本体及数学模型分析,接着对矢量控制坐标变换和空间电压矢量脉宽调制技术的原理和实现进行分析。 2.电动汽车用永磁无刷直流电机矢量控制系统实现,首先分析电动汽车用永磁无刷直流电机矢量控制系统结构,最后将电动汽车用永磁无刷直流电机矢量控制系统用Matlab/Simulink仿真。 关键词:电动汽车,无刷直流电机,矢量控制,SVPWM,Simulink
ABSTRACT Electric Vehicle has no pollution and it can supply with diversify energy sources.Also it’s energy efficient is high.These advantages can solve the problems of global energy crisis increasing and city’s traffic jam. Electric Vehicle is widely developed and applied which is called as a national ‘five years plan’focused on development of energy conservation and environment protection projects.The brushless DC motor with electronic commutator which replaces the normal DC motor mechanical switchback unit emerged,and it eliminates a few problems such as commutation sparks,brush wear,a large amount of maintenance,electromagnetic interference and so on,becoming the mainstream selection of the Electric Vehicle drive motor selection. The paper adopted the sinusoidal current drive based on space vector pulse with modulation(SVPWM) method was proposed to solve the problems of start shaking ,large torque ripple and loud noise of brushless direct current motor under the control of square-wave.The control system enabled BLDCM with different load operating in the condition of the low torque ripple smooth rotation ,low noise and high efficiency . The main studies were as follows: (1)Analyzing the mathematical model of BLDCM and the principle of the vector control.firstly,to analyze the ontology of the BLDCM and mathematical model,then analyze the vector control coordinate transformation and theory of space vector pulse width modulation. (2)Electric vehicles with a permanent magnet brushless dc motor vector control system implementation. Firstly analyze the electric car with a permanent magnet brushless dc motor vector control system structure, finally to the electric car with permanent magnet brushless dc motor vector control system with Matlab/Simulink.
编订:__________________ 审核:__________________ 单位:__________________ 防爆电机现状及发展趋势 Deploy The Objectives, Requirements And Methods To Make The Personnel In The Organization Operate According To The Established Standards And Reach The Expected Level. Word格式 / 完整 / 可编辑
文件编号:KG-AO-1943-19 防爆电机现状及发展趋势 使用备注:本文档可用在日常工作场景,通过对目的、要求、方式、方法、进度等进行具体的部署,从而使得组织内人员按照既定标准、规范的要求进行操作,使日常工作或活动达到预期的水平。下载后就可自由编辑。 防爆电机主要用于煤矿、石油天然气、石油化工和化学工业。此外,在纺织、冶金、城市煤气、交通、粮油加工、造纸、医药等部门也被广泛应用。防爆电机作为主要的动力设备,通常用于驱动泵、风机、压缩机和其他传动机械。 随着科技、生产的发展,存在爆炸危险的场所也在不断增加。例如,食用油生产过去是用传统的压榨法工艺,20世纪70年代以后,我国开始引进国外先进的浸出油工艺,但此工艺中要使用含有己烷的化学溶剂,己烷是易燃易爆物质;因此浸出油车间就成了爆炸危险场所,需要使用防爆电机和其他防爆电气产品。又如,近年来我国公路发展迅速,一大批燃油加油站出现,也给防爆电机提供了新的市场。 产品分类
1.按电机原理分 可分为防爆异步电机、防爆同步电机及防爆直流电机等。 2.按使用场所分 可分为煤矿井下用防爆电机及工厂用防爆电机。 3.按防爆原理分 可分为隔爆型电机、增安型电机、正压型电机、无火花型电机及粉尘防爆电机等。 4.按配套的主机分 可分为煤矿运输机用防爆电机、煤矿绞车用防爆电机、装岩机用防爆电机、煤矿局部扇风机用防爆电机、阀门用防爆电机、风机用防爆电机、船用防爆电机、起重冶金用防爆电机及加氢装置配套用增安型无刷励磁同步电机等。此外,还可以按额定电压、效率等技术指标来分,如高压防爆电机、高效防爆电机、高转差率防爆电机及高起动转矩防爆电机等。本文按防爆原理分类介绍。
. .. 无刷直流电动机的发展现状 无刷直流电动机的发展现状:无刷电动机的诞生标志是1955年美国D.Harrison等人首次申请了用晶体管换相电路代替机械电刷的专利。而电子换相的无刷直流电动机真正进入实用阶段,是在1978年的MAC经典无刷直流电动机及其驱动器的推出。之后,国际上对无刷直流电动机进行了深入的研究,先后研制成方波无刷电机和正弦波直流无刷电机。20多年以来,随着永磁新材料、微电子技术、自动控制技术以及电力电子技术特别是大功率开关器件的发展,无刷电动机得到了长足的发展。无刷直流电动机已经不是专指具有电子换相的直流电机,而是泛指具有有刷直流电动机外部特性的电子换相电机。 直流电动机以其优良的转矩特性在运动控制领域得到了广泛的应用,但普通的直流电动机由于需要机械换相和电刷,可靠性差,需要经常维护;换相时产生电磁干扰,噪声大,影响了直流电动机在控制系统中的进一步应用。为了克服机械换相带来的缺点,以电子换相取代机械换相的无刷电机应运而生。1955年美国D.Harrison等人首次申请了用晶体管换相电路代替机械电刷的专利,标志着现代无刷电动机的诞生。而电子换相的无刷直流电动机真正进入实用阶段,是在1978年的MAC经典无刷直流电动机及其驱动器的推出。之后,国际上对无刷直流电动机进行了深入的研究,先后研制成方波无刷电机和正弦波直流无刷电机。20多年以来,随着永磁新材料、微电子技术、自动控制技术以及电力电子技术特别是大功率开关器件的发展,无刷电动机得到了长足的发展。无刷直流电动机已经不是专指具有电子换相的直流电机,而是泛指具有有刷直流电动机外部特性的电子换相电机。 无刷直流电动机不仅保持了传统直流电动机良好的动、静态调速特性,且结构简单、运行可*、易于控制。其应用从最初的军事工业,向航空航天、医疗、信息、家电以及工业自动化领域迅速发展。 在结构上,与有刷直流电动机不同,无刷直流电动机的定子绕组作为电枢,励磁绕组由永磁材料所取代。按照流入电枢绕组的电流波形的不同,直流无刷电动机可分为方波直流电动机(BLDCM)和正弦波直流电动机(PMSM),BLDCM用电子换相取代了原直流电动机的机械换相,由永磁材料做转子,省去了电刷;而PMSM则是用永磁材料取代同步电动机转子中的励磁绕组,省去了励磁绕组、滑环和电刷。在相同的条件下,驱动电路要获得方波比较容易,且控制简单,因而BLDCM的应用较PMSM要广泛的多。 无刷直流电动机一般由电子换相电路、转子位置检测电路和电动机本体三部分组成,电子换相电路一般由控制部分和驱动部分组成,而对转子位置的检测一般用位置传感器来完成。工作时,控制器根据位置传感器测得的电机转子位置有序的触发驱动电路中的各个功率管,进行有序换流,以驱动直流电动机。
中国电机行业发展状况分析 1、行业发展历史 世界电机工业从1831年英国M.法拉第造出第一台手摇圆盘直流发电机起,迄今已有180年的历史。中国电机马达工业从1905年天津教学品制造所制作的威姆爱斯特发电机等电学、磁学类教具起,距今也逾百年历程。 新中国成立之前,我国的电机制造行业在工艺装备、技术水平、产品档次、生产能力等各方面与当时的国际水平有很大差距。上海有钱镛记、华生、华成等电器工厂,当时生产的电机,最大功率只有200到300千瓦。但也为新中国电机工业的发展积蓄了一定的产业基础。 新中国成立60多年来,我国电机工业从小到大、从弱变强、从落后走向先进,经历了依靠进口、依靠技术引进、技术吸收再创新、自主开发等不同的阶段。新中国成立之初,国民经济初步得到恢复以后,第一个五年计划期间的“156项工程”其中就有一批电机工业项目。随着发电装备、输变电设备制造业快速发展,也带动了整体电机制造行业的发展。 目前,我国电机行业已经形成了一整套完整的业务体系,产品的品种、规格、性能和产量都已基本满足我国国民经济的发展需要。我国中小型电动机保有量已经达到16亿千瓦,成为世界上最大的中小型电动机生产、使用和出口大国。 2、行业增长率 近十年,电机行业从小到大,整体上呈现增长的趋势。交流电机占整个电机行业产量的绝大部分,交流电机的发展水平和增长速度基本可以代表整个电机行业的发展水平和增长速度。 (1)电机行业增长率 据国家统计局的相关资料,2001-2013年期间我国交流电动机总产量从6,263.27万千瓦/年提高到27,914.60万千瓦/年,年复合增长率为13.26%。2008年下半年至2009年,受国际金融危机影响,电机的实物量指标和效益指标同比前期有所下降。2012年度,在全球经济低速增长态势下,国内经济继续面临经济增速放缓与通胀加剧的双重压力,以及总需求不足、产能相对过剩等因素的影响,给电机行业带来一定程度的冲击。2012年下半年国家虽实施一系列“稳增长”措施,但政策有一定滞后性,反映到大中型电机生产企业经济增速上仍需一定时间。 2012年同比2011年交流电动机产量增加502.35万千瓦,增幅1.99%。2013年同比2012年交流电动机产量增加2,223.4万千瓦,增幅8.65
简述电动机电气控制技术的现状与未来 电气控制技术的出现,是人类社会文明不断进步的体现。电气控制技术所包含的理论内容比较广泛,包括电气原理、自动化系统、网络技术等。随着科学技术的发展,电气控制技术也必将朝着越来越简单的方向发展,要想得到更加广泛的应用,那么操作系统就不能太过复杂。本文对相关技术的发展进行梳理,以期为今后的发展提供一些参考。 标签:电动机;电气控制;现状与未来 伴随着科学技术的更新和发展,为新工艺的出现提供了技术支持,继而为电气控制技术的进一步发展提供了有力的保障,特别是互联网的应用更加快了电气控制技术的发展。 一、电气控制技术的应用现状 采用一定的科学技术或手段,将电和气两个方面进行综合的技术就是电气控制技术。电气控制技术的研究对象主要是各种不同的电动机,通过一定的科学方法使得生产过程实现自动化。科学技术的不断发展,为电气控制技术的发展提供了源动力。目前,电气控制技术已经实现了自动化、智能化和信息化。但是,和国外的电气控制技术相比,我国的电气自动化技术发展水平相对较弱,特别是在电气智能技术的发展方面,尽管已经迈上了新台阶,但是电气智能水平还不够。 当然,在电气控制技术实际应用中,仍然会存在缺陷。正是存在这样的现实情况,我国要想突破电气控制技术的发展瓶颈,就必须学习国外先进技术。同时,对自身的工作理念进行创新,在总结经验和加强训练的过程中,及时发现问题、分析问题和解决问题。 二、电气控制技术的发展阶段 (一)手动操作发展到自动化操作 从电气控制手动化发展到自动化的过程,是电气控制技术发展的初始时期。电气控制从诞生开始经历了手动化、半自动化和自动化的过程,而且每个过程的转变都伴随着社会经济和科学技术的发展。在这一时期,电气控制技术的发展主要表现为控制手段和设备的自动化,并且这种改变给社会带来的变革是深刻的,不仅最大程度的释放了人力,还对人力资源的配置进行了不断优化。 (二)简单化发展到智能化 在电气控制技术的简单化阶段,要实现自动化仍然要依靠外在人力实施辅助作用,因而出现失误的次数大大增加。事实上,在手动操作的过程中,失误难以避免。为了减少失误,人们对更先进的电气控制技术进行了不懈研究,而电气控
我国电机发展的历史与现状 摘要:本文首先讲述我国电机的历史,介绍电机的发展史,然后讲述我国电机的发展现状及现在中国电机的特点,最后着重讲述我国电机的发展趋势。 关键词:电机;历史;现状 一、我国电机的发展史 1、我国大功率电机的发展 中国电机的生产和应用起步很晚,但发展很快。 中国在文化大革命中已经生产和应用,例如江苏、浙江、北京、南京、四川都生产,而且都在各行业使用,驱动电路所有半导体器件都是完全国产化的,当时是全分立元器件构成的逻辑运算电路,还有电容耦合输入的计数器,触发器,环形分配器。中等耐压的大功率半导体器件也完全国产化。当时应用最多的是线切割机,都是快走丝的。线切割机的X-Y平台丝杆就用步进电动机驱动。当时的图纸是全国公开,给个晒蓝图的费用就行了。 随着改革开放政策方针的实施,80年代我国电机发展很迅速。 步进电机的细分控制,在改革开放初期,国内就已经基本掌握,这与交流电动机的矢量控制相比,难度要低得多。在卫星、雷达等应用场合,中国在文化大革命后期,就生产了力矩电机,就生产了环形力矩电机。 我国直线电机的研究和应用发展是从20世纪70年代初开始的。1972年,浙江大学在国内首先翻译了一本《直线感应电动机》译文集,后由科学出版社出版发行,尔后,上海大学、上海电机厂、中科院电工所等又编译了一些直线电机的书籍并出版,近两年来,浙江大学又连续出版了3本直线电机著作,国内开展直线电机应用研究的单位主要有:中科院电工所、西安交通大学、浙江大学、上海大学、太原工业大学、焦作矿业学院等。主要成果有工厂行车、电磁锤、冲压机、摩擦压力机、磁分选机、玻璃搅拌、拉伸机、送料机、粒子加速器、邮政分拣机、矿山运输系统、计算机磁盘定位系统、自动绘图仪、直线电机驱动遥控(电动)窗帘机、直线电机驱动门、炒茶机等,我国直线电机研究虽然也取得了一些成绩,但也国外相比,其推广应用方面尚存在很大差距,目前,国内不少研究单应已越来越注意到这点。 90年代至今,我国的大功率电机已在重工业上应用很广,技术相对成熟。 2、小功率电机的发展 我国小功率电机产业经过40多年的发展,特别是改革开放20多年以来的快速发展,取得了长足进步。 小功率电机产业在我国的发展分两个阶段。第一阶段,顺应我国家电业发展的需要,应用于风扇、空调器、冰箱、洗衣机、排油烟机、小家电、保健器具等产品的小功率电机,国内企业通过技术引进、设备引进吸收,已缩小了同发达国家的差距,部分产品的技术水平已达到国际先进水平,企业具有了很强的自主研发能力、自主知识产权,也形成了一些具有广泛市场知名度的产品品牌。电机产品在自身大量出口欧美等国际市场的同时也随着风扇、空调器等家电主机产品畅销国际市场,成为我国机电出口业务的主要部分。第二阶段,随着汽车工业的快速发展,车用小功率电机的需求也迅速增长,带动了以永磁直
液压马达的发展历程、现状以及趋势 车辆工程082班 殷丽娟 089054065 摘要:液压马达是液压传动中的一种执行元件。它的功能是把液体的压力能转换为机械能以驱动工作部件。它与液压泵的功能恰恰相反。液压马达在结构、分类和工作原理上与液压泵大致相同。有些液压泵也可直接用作为液压马达。液压马达可分为柱塞马达、齿轮马达和叶片马达。柱塞马达的种类较多,有轴向柱塞马达和径向柱塞马达。轴向柱塞马达大都属于高速马达,径向柱塞马达则多属低速马达。下图有轴向柱塞马达原理图。压力油通过配油盘进入缸体内,迫使柱塞从缸体中伸出,并沿斜盘滑动,使缸体与轴一同旋转而做功,回油通过配油盘的另一开口排出。齿轮马达和叶片马达属于高速马达,它们的惯性和输出扭矩很小,便于起动和反向,但在低速时速度不稳或效率显著降低。液压泵只是单向转动,而液压马达则能正反转,故齿轮马达的进出油口对称,而齿轮泵进口大而出口小。叶片马达的叶片在转子上径向排列;叶片泵的叶片则不是径向排列,而有一定倾角。液压马达是作连续回转运动并输出转矩的液压执行元件。 关键词:液压马达马达种类液压马达结构液压马达原理液压马达主要参数计算液压马达发展历程、现状以及发展趋势。 概述 从20世纪80年代以来,液压马达作为一种液压执行元件在国内外的发展较快,尤其是径向柱塞式低速大扭矩液压马达较之其它类型的液压马达,因为其具有的低速大扭矩和无需减速装置以及结构相对简单、工艺性良好和使用可靠的特点,在冶金机械、矿山机械、起重运输等多为使用。 液压马达习惯上是指输出旋转运动的,将液压泵提供的液压能转变为机械能的能量转换装置.
看下面的图片
液压马达亦称为油马达,主要应用于注塑机械、船舶、起扬机等。 高速马达和齿轮马达具有体积小、重量轻、结构简单、工艺性好、对油液的污染不敏感、耐冲击和惯性小等优点。缺点有扭矩脉动较大、效率较低、起动扭矩较小(仅为额定扭矩的60%——70%)和低速稳定性差等。