过载自动驾驶仪的设计
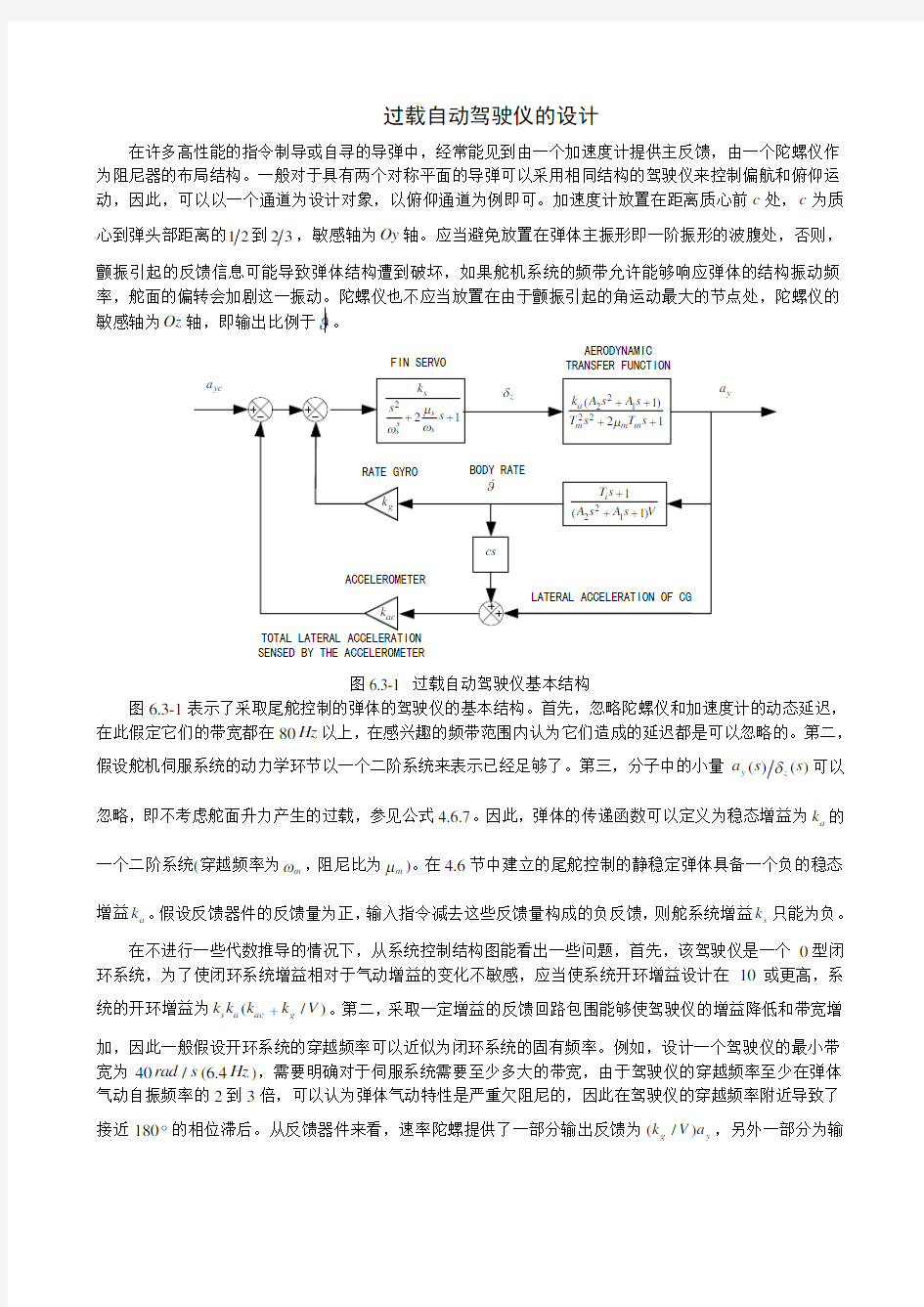
在许多高性能的指令制导或自寻的导弹中,经常能见到由一个加速度计提供主反馈,由一个陀螺仪作为阻尼器的布局结构。一般对于具有两个对称平面的导弹可以采用相同结构的驾驶仪来控制偏航和俯仰运动,因此,可以以一个通道为设计对象,以俯仰通道为例即可。加速度计放置在距离质心前c 处,c 为质心到弹头部距离的12到23,敏感轴为Oy 轴。应当避免放置在弹体主振形即一阶振形的波腹处,否则,颤振引起的反馈信息可能导致弹体结构遭到破坏,如果舵机系统的频带允许能够响应弹体的结构振动频率,舵面的偏转会加剧这一振动。陀螺仪也不应当放置在由于颤振引起的角运动最大的节点处,陀螺仪的敏感轴为Oz 轴,即输出比例于?。 ?FIN SERVO
AERODYNAMIC TRANSFER FUNCTION
SENSED BY THE ACCELEROMETER
图6.3-1 过载自动驾驶仪基本结构
图6.3-1表示了采取尾舵控制的弹体的驾驶仪的基本结构。首先,忽略陀螺仪和加速度计的动态延迟,在此假定它们的带宽都在80Hz 以上,在感兴趣的频带范围内认为它们造成的延迟都是可以忽略的。第二,假设舵机伺服系统的动力学环节以一个二阶系统来表示已经足够了。第三,分子中的小量()()y z a s s δ可以忽略,即不考虑舵面升力产生的过载,参见公式4.6.7。因此,弹体的传递函数可以定义为稳态增益为a k 的一个二阶系统(穿越频率为m ω,阻尼比为m μ)。在4.6节中建立的尾舵控制的静稳定弹体具备一个负的稳态增益a k 。假设反馈器件的反馈量为正,输入指令减去这些反馈量构成的负反馈,则舵系统增益s k 只能为负。 在不进行一些代数推导的情况下,从系统控制结构图能看出一些问题,首先,该驾驶仪是一个0型闭环系统,为了使闭环系统增益相对于气动增益的变化不敏感,应当使系统开环增益设计在10或更高,系统的开环增益为(/)s a ac g k k k k V +。第二,采取一定增益的反馈回路包围能够使驾驶仪的增益降低和带宽增加,因此一般假设开环系统的穿越频率可以近似为闭环系统的固有频率。例如,设计一个驾驶仪的最小带宽为40/rad s (6.4Hz ),需要明确对于伺服系统需要至少多大的带宽,由于驾驶仪的穿越频率至少在弹体气动自振频率的2到3倍,可以认为弹体气动特性是严重欠阻尼的,因此在驾驶仪的穿越频率附近导致了接近180?的相位滞后。从反馈器件来看,速率陀螺提供了一部分输出反馈为(/)g y k V a ,另外一部分为输
出量的一阶微分反馈(/)g i y k T V a ,因此速率陀螺测量的信号为(/1/)g i y k T s V V a +。包含输出量y a 一阶微分的反馈对于增强系统的稳定性是有利的。对于加速度计,由于放置在距离质心c 处,因此它的反馈量包括质心运动的加速度加上角加速度?乘以距离c ,加速度计的总输出为2(//1)i y cT s V cs V a ++。如果加速度计放置在质心前,则0c >,此时得到的总反馈信息为一定比例的输出量y a 加上y a 的一阶和二阶微分信息,实际上提供了y a 的一个二阶超前系统,所有反馈均为负反馈。总反馈的信息为
2[(/)(//)(1/)]ac i g i ac g ac y k cT V s k T k V c V s k k V a ++++。
此时的分析虽然不是很精确,但已经明确必须尽可能的依靠目前的硬件布局条件设计出超前能力大于70?的反馈校正网络。只有这样才能允许舵机系统在驾驶仪穿越频率处存在20?~25?的相位滞后,系统的相位裕度仍能保持50左右?,这就意味着舵机系统的带宽必须至少为3到4倍的驾驶仪设计带宽,对于一个设计带宽为40/rad s (6.4Hz )的驾驶仪可能需要带宽至少为150/rad s (24Hz )的舵机系统。 现在不忽略()()y z a s s δ的情况下进一步准确一些考虑附加小分子的影响。按照公式4.6.7描述的话,图6.3.1中的a k 被置换为221(1)a k A s A S ++。气动模型零点的引入也导致了从俯仰角速度到输出过载的传递函数()/()y s a s ?的复杂化。将传递函数()/()y z a s s δ与()/()y s a s ?相乘可以得到由公式4.6-8给出的公式()/()z s s ?δ。 驾驶仪的总传递函数为:243243210()y
cy a Vb s Va b s V a b a b a a s a s a s a s a δωδδααδ--+-=++++ (6.3-1) 其中:01()()()ac g s a a b a k V k a b a b k ωααδααδ=
+++- 121[()()][()]s g ac s s a a b a a b k a k Va b c a b a b k ωααωαδωδδααδμω=
++++--- 2221[1()]()s ac s s s a b a a a b k Vb ca k ωααωαδδμωω+=
+++-- 31(2)s s s s a b a k ωαμωω+=
+ 421
s s a k ω=
为了设计尾舵控制的导弹的自动驾驶仪,必须首先作出对弹体所需气动特性的系数估计。假定设计导弹在500/m s 的飞行速度下能产生2502/m s (25.5g )的法向加速度(下一章将讨论需用过载的指定)。定义导弹平均飞行速度为500/m s
500/m s
,最小飞行速度为500//m s ,即飞行速度变化为1到 1.5倍之间。假设升力大小正比于攻角大小,并且定义弹体最大攻角为0.2rad (max 11.5α=?)。因此,单位攻角产生的弹道偏转角速率为:
1max max /()/(/)/(250/0.2)/500 2.5y y b Y mV a V a V s αα
αα-=====
然而,尾舵控制的弹体由于翼身组合、控制面流场干扰等因素导致总升力下降,因此需要留出10%的估计误差余量,定义13.0α-=b s 。定义弹体特征长度()l 为2m ,被动段质量()m 为52kg ,转动惯量z J 为142kg m ?。单位攻角产生的静稳定力矩a α可以由b α及静稳定度决定,考虑到将来对弹体的控制,需要为弹翼选取合适的位置,先初步定义弹体静稳定度为4~5%的弹体总长,需要指出,这个量会随着马赫数和攻角有所变化。
此时,*z M Y x αα=-?(*x 为静稳定度,对于静稳定弹体*0x >),/z z a M J αα=,/()b Y mV αα=,如果
定义*0.09x m =(弹体长度的4.5%),
**2///52500 3.00.09/14500z z z z a M J Y x J mVb x J s αααα-==?==???=
现在讨论对升降舵能力的要求,如果控制力臂()l '为弹体一半长度的3/4,即l '=0.75m ,静稳定度为*0.09x m =,那么以最大舵偏角为0.24rad (max 13.8δ=?)的控制力矩来平衡静稳定力矩,需要满足,
*max max Y l Y x δαδα'=,*max max b l b x δαδα'=
*1max max 0.30.20.090.30.240.75
b x b s l αδαδ-??==='? 稳定的弹体转动速率决定了稳定的法向过载输出,此时由于弹体阻尼造成的负向阻尼力矩将降低升降舵的控制力矩效率,给出设计余量,令10.36b s δ-=,弹体阻尼一般很小,没有必要精确的定义,大致定义阻尼力矩系数13.0a s ω-=,根据控制力矩的力臂长度,可以得到,
2///0.36525000.75/14500z z z z a M J Y l J b mVl J s δδδδ-''==?==???= 由于z a δωδ
?=-?,即该系数表征了控制力矩造成的弹体转动加速能力,因此该参数对于驾驶仪的响应速度来说是关键的一个参数。稍后将进一步检验参数a δ能否满足驾驶仪响应速度要求。暂时选择加速度计放置为质心前0.5m 处,得到的控制系统相关参数如下:
m =52kg z J =142kg m ? L =2m *x =0.09m (4.5%)
l '=0.75m m a x
α=0.2rad m a x δ=0.24rad max y a =2502ms -
目前,余下的5个参数将成为控制系统中的调节参数,需要进行优化处理的这5个参数为s k 、s ω、s μ、
ac k 、g k ,首先尝试在不引入任何补偿回路的情况下进行设计。
对驾驶仪的要求会如何提出?假设名义上的制导回路增益为102/ms m -(即1m 的位置误差将产生102/m s -的加速度指令),因此如果假设自动驾驶仪是足够快的情况下,制导回路的带宽为
3.2/(0.5)rad s Hz =,在引入超前校正网络后能够提高到5/(0.8)rad s Hz ,因此在工作频带2~12/rad s 范围内驾驶仪应当具备较小的相位滞后。对驾驶仪最大相位滞后的要求可以确定为:5/rad s 时不大于15?,10/rad s 时不大于30?。这也就是对于该特性的系统要求驾驶仪带宽不小于40/rad s (6.4Hz )的原因。在使用了前馈补偿方式的系统中,需要考虑开环增益10%的浮动,但是在导弹极限速度的考虑可能还必须允许该百分比增加一些。
三点法导引的制导外回路基本结构
在设计中还会遇到对于稳定性要求的设计指标,诸如时域内的超调百分比、频域内的幅值裕度和相位裕度等,在共振频率处还需要考虑一定的阻尼比来限制等效噪声带宽。设计的驾驶仪在各个特征点处均需满足要求,还必须注意舵机系统的增益和带宽,确保在存在的噪声激励下出现饱和,基于这些考虑,对于舵机系统,设计者又需要确定出尽可能低的增益和尽可能窄的带宽,这样导致了伺服机构速率的降低。
现在已经意识到对于任何闭环系统而言,开环增益是一个最基本的变量,是前向增益和反馈增益的乘积。处于便利起见,定义驾驶仪的增益为1,则闭环增益基本确定为1,速率陀螺提供了部分反馈情况下,加速度计增益(ac k )可以定为0.8以达到近似1的反馈增益。在参数调节实践中,可以将该加速度计反馈增益变成原来的1/10,舵机系统增益乘以10,开环增益并不发生任何变化,但在这种情况下闭环增益将不再是1。
以一个较为详细的例子说明,设计目标是满足开环增益为10的制导回路,并设计驾驶仪闭环增益为1,在这种情况下,将反馈增益除以10,舵机增益乘以10,开环增益并未改变,但驾驶仪闭环增益变成10,因此,误差检验装置的增益必须变成1才能保证制导系统开环增益仍然为10。显然,上述两种系统对于特定制导误差输入情况下,舵机系统输出量应该是一致的。
可以认为:设计完整的闭环系统时,分系统的增益只是处于方便而定义,电压输出是可以改变的,真正有意义的还是主回路或者辅助回路的开环增益。
因此,定义伺服机构的无阻尼自然频率为180/(29)s rad s Hz ω=,这一指标可以由燃气舵或者冷气舵方式实现,舵机阻尼比为0.5s μ=。
由于驾驶仪的主要特征基本由系数0a 、1a 和2a 决定,固有频率为20a a ,如公式6.3-1中所示,并且g k 对该参数基本没有影响(g k 主要提供对弹体的阻尼补偿),因此在初步设计中可以先假设0g k = ,下表显示了参数s k 对驾驶仪带宽a ω的影响(从表中可以看出s k 越大,弹体带宽越大,频域考虑是增加了开环增益导致了时间常数的减小,截止频率可以获得提高,物理实质是相当于提高了舵机的功率,能够产生较大的控制力矩,这也是系统快慢的主要硬件限制)。
表6.3-1 s k 与驾驶仪截止频率a ω的关系
需要达到驾驶仪带宽为40/n rad s ω>,可以选择先确定0.004s k =-(根据系统带宽要求首先确定了系统开环增益)。
然后选取180/s rad s ω=,0.5s μ=,0.004/s k rad V =-,g k 可以根据根轨迹方法确定。(可以认为在由s k 调节合适后的开环增益已经保证了Bode 图中的截止频率位置,然后通过调节g k 保证根轨迹在左半平面并且具备合适的动态特性,相当于保证在截止频率附近相位滞后不超过-180?,并且留足一定的相位裕度。)图6.3.3和表6.3-2显示了参数g k 与闭环根的关系,可以明确,较大的g k 可以增强低频根的稳定性,但降低了高频根的稳定性。
表6.3-2参数k g 与闭环根的关系
图6.3.3 k g 作为参数的根轨迹
经过分析,g k 选择45比较合适,再取不同的速度点进行检验可以确定该参数是合适的。
最终的传递函数在不同的速度点的形式如下:
当500//V s =时: ()2222()
0.8340.02071(0.01971)
()20.86620.3421139.717039.7170y yc a s s a s s s s s -+++=??????++++ ???????
当500/V m s =时:
()2222()
0.9240.01691(0.01611)
()20.86620.2511156.017256.0172y yc a s s a s s s s s -+++=??????++++ ???????
当500/V s =时:
()2222()
0.9980.01381(0.01321)
()20.89320.1381176.918176.9181y yc a s s a s s s s s -+++=??????++++ ???????
g k 的具体选择过程,参量根轨迹方法: 驾驶仪的总传递函数为:243243210()y
cy a Vb s Va b s V a b a b a a s a s a s a s a δωδδααδ--+-=++++ 其中:01()()()ac g s a a b a k V k a b a b k ωααδααδ=
+++- 121[()()][()]s g ac s s a a b a a b k a k Va b c a b a b k ωααωαδωδδααδμω=
++++--- 2221[1()]()s ac s s s a b a a a b k Vb ca k ωααωαδδμωω+=
+++-- 31(2)s s s s a b a k ωαμωω+=
+ 421
s s a k ω=
闭环系统的特征方程为:432432100a s a s a s a s a ++++=,把包含g k 的项分离出来:
即432432a s a s a s ++
21[()()][()]s g ac s s a b a a b k a k Va b c a b a b s k ωααωαδωδδααδμω??+++++---???? 1()()()ac g s
a b a k V k a b a b k ωααδααδ++++-
0=
整理得到:432432a s a s a s ++
21[()()][()]s ac g s s a b a a b k Va b c a b a b s k a s k ωααωαωδδααδδμω??++++---+???? 1()()()ac g s
a b a k V a b a b k a b a b k ωααδααδδααδ+++-+- 0=
化简为形如()()0g A s k B s +=的形式如下: 其中43243221()[()()][()]s ac s s A s a s a s a s a b a a b k Va b c a b a b s k ωααωαωδδααδμω??=++++++---???? 1()()ac s
a b a k V a b a b k ωααδααδ+++- ()B s a s a b a b δδααδ=+-
两端同除以()A s ,得到()()()
B s G s A s '=为等效开环传递函数,可以绘制出原系统的参量根轨迹。 过载驾驶仪中,参数c 引入了过载输出y a 的二阶微分,对于增强系统稳定性是十分重要的。在以上的设计例子中,如果令0c =(即加速度计安装在质心位置),系统的特征根变成1181.55r =-,233.00r =-,3,414.27123.52r i =±,系统变为不稳定。(备注:如果c 为正的话,对于系统而言能够提供一部分二阶超前校正,但并不是必不可少的,在设计好的系统中如果调整c 为零可能造成系统动态性能变差甚至失稳,但对于给定的c 设计满足指标的驾驶仪是没有问题的,这一点通过仿真可以验证,说明例子中给出的设计结果只是针对与所指的特定弹体而言。)
如果由于一些原因导致不得不将加速度计放置在质心之后,很可能需要引入?信号参与控制,由角加速度计产生或者由速率陀螺输出加超前实现来增强系统稳定性,由此可见,将加速度计放置在质心之前的重要性。
在500/V m s =情况下观察驾驶仪的阶跃输入响应,输出信号基本由系统的低频根决定,56.0/n rad s ω=(8.91Hz ),0.890μ=,阻尼比是合适的。实际上快根的欠阻尼情况对系统而言并不造成严
重后果。原系统的开环截止频率为233500509n
a b a ωααω=+=?+=,2 3.0 3.0 6.0n a b ωαμω=+=+=,因此弹体的频率为22.6/(3.6)n rad s Hz ω=阻尼为0.13μ=,可见,通过驾驶仪实现了使原有响应速度变为2.5倍,并且阻尼调整到合适的位置。
下图给出了,在500/m s 速度下阶跃输入502/m s 时的闭环频率响应曲线,以及攻角、舵偏角和法向加速度曲线。
闭环系统Bode 图(忽略1A 、2A ) 阶跃输入下的加速度、舵偏、攻角响应
现在可以从某种意义上总结出一些设计中的大致要求:
(a)在制导回路给定的工作频率范围是2~12/rad s (0.3~2Hz ),闭环增益会在名义增益基础上存在-3.4%~+8.4%的浮动,这一浮动主要是由于动压造成的变化造成,因此,在初步设计中需要考虑留出±10%的设计工作范围。
(b)对于驾驶仪经常关心其在制导回路穿越频率范围内的相位滞后问题,在低频段驾驶仪造成的相位滞后很小的原因主要是由于引入反馈使弹体原有的主模态无阻尼自振频率得到加快。
闭环响应加快的现象可以从法向过载和舵偏角的曲线上看出,舵机在最初出现较大的舵偏角,这是因较小反馈量出现大的偏差并且增益较大导致。然后有效的反馈超前校正系统随之产生相反的控制量来阻止系统出现较大的超调,执行机构的足够功率保证了控制信号的有效实现,因而闭环系统与其他反馈控制系统基本上没有差别。
系统响应的加快不仅仅取决于传递函数本身,还需要考虑物理机构的响应能力,如功率、速率、最大偏转角等传递函数中内在所固有的要求。如果此时不考虑系统稳定性的话,可以通过使舵机增益增加一倍来进一步增加系统的响应速度。结果是对于给定的输入,舵机在初始时刻需要尽力偏转先前两倍的角度,虽然改变前向通道增益并不能增加稳态输出的加速度值,但要求系统响应要快,对于舵机有最大可用角度限制,如果在任何时候舵机的偏转都要以两倍的量进行的话,那很可能超出它的实际能力范围,因此,参考某一实际的传递函数时,必须主要限制一些分系统中的增益值。
(c)可以看出闭环系统阻尼比基本调整到满意的程度,并不是增加了空气密度,而是通过反馈回路对输出信息的调整进而对执行机构实时进行修正,不过在高频段,认为快根是欠阻尼的。如果加速度计放置的位置向前调整,则主根的阻尼能得到提高,也可以通过将速率陀螺的信号稍微超前来提高系统的稳定性,如引入:3:1αβ=的超前校正网络(最大超前角度约为30?)。
有必要讨论一下校正网络的作用,相位超前和相位滞后网络都属于调节网络,可以认为校正网络仅仅在时间常数所对应的开环截止频率处起作用。如果开环增益是有浮动的,那么校正环节只在特定的某个增益位置产生较为精确的补偿作用,在其他增益处效率逐步衰减。一般而言,超前校正网络一般不放在误差比较信号后,原因是在制导回路中已经存在超前校正环节。通过驾驶仪的反馈信号与指令比较后的信号信噪比不会有所改善(原有信噪比本身比较小,指令中包含的噪声信号在引入反馈后与原有信号功率比并不减小多少),表面上看,对加速度计的反馈信号进行超前校正是比较安全的,原因是比较误差中的噪声信号经过舵机及弹体气动力传递函数后已经进行滤波,但是,弹体环节的滤波作用在高频段效果并不是很大,原因是传递函数中包含的两个零点导致(由于两个零点很大,因此在高频段的时候会产生+40dB 斜率的增益作用,使得幅值并不沿着-40dB 的方向延伸)。可以认为,即使是弹体并没有任何动作时,也将存在一个由于舵面升力产生的加速度。此外,由于推力噪声及气动变化问题会造成弹体的附加运动,假设弹体某一
点的运动n y 由?sin n n
y Y t ω=给出,那么该点的加速度应该是2ω倍的该值。假设该噪声中存在高频信号,加速度计的输出实际上包含该信号,即使是加速度计安装在弹体一阶振形的振动节点处,该点也不可能是所有高频振动的节点,因此,加速度计的信号几乎无法进行超前校正。角速率陀螺的信号的噪声问题不像这么严重,角位置陀螺信号应当是经过滤波的,角位置信号经常可以用相关装置进行超前后使用。此外在反馈回路中使用滞后网络是有利的,因为能削弱系统在高频段的开环增益,这样能够允许高增益系统的应用,同时对于反馈回路中所有高频段的噪声有抑止作用。 可以认为反馈器件的应用加快了弹体系统的响应,并且对于弹体增益的适当变化是容许的。但如果弹体增益变化较大时,可能需要采用一些自适应系统来应对。
增加PI 校正的过载自动驾驶仪
在前向通道上引入PI 校正能够有效的降低气动参数的变化对系统闭环增益的影响,PI 校正的引入使系统成为1型系统,表6.3-4给出某战术导弹的相关气动参数,该导弹无阻尼自振频率为 6.25/m rad s ω=,阻尼比为0.161m μ=。
(/)V m s 2()a s α- 2()a s δ- 1()a s ω- 1()b s α- 1()b s δ- ()c m
1140 72.4 471 1.5 1.27 0.477 0.66
表6.3-4 某战术导弹的气动参数
图6.3-10给出了对同一导弹的侧向自动驾驶仪分别进行加PI 和不加PI 校正环节设计时候的的图,加速度计安装在弹体前部,c=0.66m ,弹体速度是1140m/s 。
在21/c a m s 信号输入下的有、无PI 校正的系统响应如图:
引入PI 校正后的系统过载输出比较 PI 校正环节的Bode 图
可见,引入PI 校正后,系统的静差已经的到较好的消除,原因是引入的PI 校正环节可以在低频段产生较大的幅值增益,因此大大减小了稳态误差,而在接近截止频率附近又能保证不影响原有系统的稳定性。但是引入PI 后,会导致系统响应变慢,并且不可避免的会造成原有系统幅值裕度和相位裕度略微变小。
需要指出的是,即便引入PI 校正后的系统可能由于实际弹体增益的变化还会引起闭环系统截止频率的移动,最有效的办法还是采用自适应调整方法来实时改变前向增益s k 和反馈增益g k 。
ArduPilot 自动驾驶仪手册 一、简介 系统构成: 1、一块ArduPilot Mega板(红色) 2、一块ArduPilot Mega IMU板(红色) 3、一套 MediaTek GPS 或者 uBlox GPS模块 4、若干根接收机连接线及配套的插线,如果需要使用系统的自动驾驶和功 能,推荐使用8通道接收机 5、一套Xbee数传电台,一块Xbee数传电台与ArduPilot Mega IMU,另一 块通过适配器与PC相连(提醒:因传送的数据量大,推荐配置空中速率 位57600bps的数传电台,低速率数传电台将会导致严重的数据丢包现象)。 仔细阅读本手册,将有利于调试自动驾驶仪。作为一套开源的自动驾驶仪,我们支持第三方传感器的接入,如空速计、电子罗盘等,这意味着您必须对本系统进行正确的参数设置,才能安全飞行。 二、快速入门指南 (一)电路板的组装 所需材料及工具:MEGA 板和IMU板各一块;板件连接插件若干;带 连线的GPS模块(推荐4HZ);烙铁;焊丝等 1、焊接MEGA机IMU板上的元器件
2、对应安装好两块板子之间的连接插件
3、两块板子相插 4、连接GPS模块之后的样子,注意:GPS模块连接在红色MEGA 板子上,而非蓝色IMU板子上的接口,IMU的6芯接口用于连 接诸如电子罗盘等外接传感器。 (二)如何连接 1、系统连接图
其中,自动驾驶仪控制通道为第八通道,利用三段开关进行模式切换。 2、安装示意图
因IMU板载三轴传感器,系统安装时需充分考虑到减震,尽量使其 在飞机上水平安装,且安装方向应如上图所示。 3、DIP开关的使用 因为接收机和配置文件之间会存在差异,可能会导致舵机出 现反向工作,这时你可以通过拨动DIP开关进行修正,而非 通过复杂的参数修改进行修正。 三、编程 (一)所需工具 1、MINI USB数据线,用于ardupilot与PC的相连。 2、配置软件arduino,下载地址https://www.doczj.com/doc/d669372.html,/en/Main/Software (二)如何通过arduino进行编程 1、通过USB连接arduino与PC,同时根据提示安装FT232RL驱动,并记下 串口号。
自动驾驶系统 什么是自动驾驶系统? 自动驾驶系统(自动驾驶仪),是一种通过飞行员按一些按钮和旋转一些旋钮,或者由导航设备接收地面导航信号,来自动控制飞行器完成三轴动作的装置。不同型号的飞机所装备的自动驾驶仪可能会有一些小的差别,但是大体相似。 自动驾驶系统能做些什么? 在FS2004里,Cessna 和Beechcraft Baron 58 装备的自动驾驶仪具有以下功能: ?保持机翼水平,不发生滚转。 ?保持飞机当前的仰俯角。 ?保持选定的飞行方向。 ?保持选定的飞行高度。 ?保持选定的上升率或下降率。 ?跟踪一个VOR电波射线(Radial)。 ?跟踪一个定位信标(Localizer)或反向航路定位信标(Localizer Back Course)。 ?跟踪仪器降落系统(Instrument Landing System)的定位信标和下滑道指示信标(Glide Slope)。 ?跟踪一个GPS航路。 在FS2004中,Beechcarft King Air 350, Bombardier Learjet 45, 和所有的Boeing 喷气机,都装备有自动飞行控制系统,包括自动驾驶仪,自动油门(自动节流阀门)和飞行指挥仪。这套系增加了以下功能: ?保持一个选定的飞行速度(空速或地速)。 ?消除有害的偏航。 ?帮助飞行员正确的手动控制飞机。 在FS2004中,有些机型或面板上,提供更多的自动驾驶仪操作功能:
?飞行管理计算机(Flight Management Computers) ?垂直方向导航(Vertical Navigation) ?横向导航(Lateral Navigation) ?飞行水平改变(Flight Level Change) ?机轮控制(Control Wheel Steering) ?自动降落(Autoland) 为什么要使用自动驾驶仪? 有些人认为真正的飞行员是不需要自动驾驶仪的,这个观点是有一点偏颇的,因为适当的使用自动驾驶仪可以减小飞行员工作量,特别是在仪器飞行规则(Instrument Flight Rules)的时候。你可以让自动驾驶仪帮助你完成一些辅助工作(比如象保持航向和高度),可以让你集中精力去完成其他一些与飞行安全相关的工作(比如导航,观察交通,通话等等)。 使用自动驾驶仪也会减轻你在完成一次长距离飞行后的疲劳程度。在整个飞行进程中最危险的进近和降落阶段(尤其在是在云层中的颠簸时),如果飞行员已经被简单的飞行操作耗去了大量的精力和体力……。 两个最重要的准则 当两个飞行员(比如一个教练,一个学员)轮流操作飞机,在任何时候他们会非常清楚现在谁在控制飞机。当一个飞行员移交控制给另一个飞行员,他会说:“你来控制飞机。”当第二个飞 行员开始控制飞机时,他会说:“我来控制飞机。”这种方法避免了两个飞行员同时控制飞机或 者两个人都不在控制飞机的危险情况。 使用自动驾驶仪的话就不一样了。两个最重要的准则就是在使用两轴或三轴自动驾驶仪时,要记住: 1.自动驾驶仪关闭时,你控制飞机。 2.自动驾驶仪打开时,你监控和控制自动驾驶仪。 自动驾驶和飞行
2010年3月(上 ) [摘要]本文设计了一种基于单片机的汽车行驶记录仪,它可以对车辆行驶速度、时间、里程以及有关车辆行驶的其他状态信息进行记录存 储,然后通过接口实现数据输出。本文主要介绍了该测量仪的硬件系统组成和软件系统的主流程设计,并简单介绍了该系统的抗干扰设计。[关键词]单片机;记录仪系统;模块化设计基于单片机的汽车行驶记录仪系统设计 宋艳 (常州信息职业技术学院电子信息工程系,江苏常州213164) 随着汽车普及率的提高,交通阻塞也越来越严重,人流,物流,车流骤增,导致道路交通事故频繁发生,而且呈上升趋势,群死群伤的恶性交通事故屡屡发生。给人民生命、企业的经营活动和国家财产都造成了巨大的损失。为了保护人民的生命财产安全,遏制交通事故频发,许多公司企业科研单位研制开发汽车行驶记录仪。本文在汽车行驶记录仪的背景和发展现状基础上,结合汽车行驶记录仪系统的国家标准,自主研究了一套基于单片机的汽车行驶记录仪系统。整个系统包括汽车端的汽车行驶状态记录仪和计算机端的汽车行驶信息数据分析软件两部分,前者记录下的状态数据最终送到计算机,由计算机侧相应的分析软件来分析,这样得到的结果有助于运输企业和管理部门监控车辆的运行状态,加强对车辆和驾驶员的管理,同时也可为交通管理部门对汽车事故处理提供相应的技术手段。这里仅介绍汽车端的汽车行驶状态记录仪的设计(以下简称记录仪)。 1记录仪系统的功能和主要性能指标1.1系统的主要功能 1)能够实时监测并记录汽车行驶的各种状态信息,包括速度、里程等重要数据。2)可记录驾驶员信息(如姓名、工号等)和汽车信息(如车号等),为有关部门检查提供必要的信息。3)安装在汽车上的汽车行驶状态记录仪可进行输入信息的提示,同时还要有实时信息的显示,并可根据用户要求或设置,另外还要具备汽车超速时的报警功能。4)具有数据通信功能,可以将记录仪系统与PC机和U盘等设备进行数据传输。 1.2系统的主要性能指标 1)合适的数据记录频率:速度的采样周期可设置为1次/s ̄0.2次/s。2)一定的数据记录容量:0 ̄240h。3)较长的数据存储时间:掉电情况下可至少保存10年以上。4)监测汽车行驶速度范围:0 ̄240km/h。5)记录需要的汽车行驶数据,包括速度、里程、超速度及时间、停车次数及时间。6)可以存储驾驶员信息、汽车信息、发车时间和到站时间。7)要能够抗电磁干扰、防火、防潮、抗冲击。8)尺寸大小合适,便于在汽车上安装。 2系统的总体构思 本系统主要包括数据采集、数据存储、液晶显示和键盘电路、单片机系统和通信接口等几个功能模块。系统的总体结构框图如图1所示 。 图1记录仪系统的总体结构框图 3系统的硬件设计 3.1供电电源模块 目前汽车内部产生的供电是+12V,而记录仪正常工作时,本身芯片所需的电压为5V。为了保证记录仪的正常工作,所以系统需要供电模块来实现+12V~+5V的电源变换。因此选用DC/DC变换器 MC34063组成DC/DC降压变换器。 3.2单片机系统 对于整个汽车记录仪而言,单片机是整个系统的核心部分,本系统采用了PHILIPS公司生产的P89C51RD2单片机。该芯片除了具有256字节的内部RAM,还扩展了768字节的RAM空间,完全能够满足程序运行期间所需要的比较大的数据空间,无需扩展外部RAM,使系统更可靠和更经济。并且P89C5l RD2中的在系统编程和在应用中编程功能可以通过串口对汽车行驶记录仪进行软件升级,极大的方便了记录仪的维护工作,为汽车行驶记录仪功能的完善提供了便利。 3.3信号采集模块 本系统采集的信号主要分为三个部分:车速信号、开关量信号以及和实时时钟数据,对不同种类的信号采用不同的采集方式。时钟数据采集由实时时钟模块完成。1)车速信号的采集。车速信号的采集主要是通过霍尔传感器把车速转换车脉冲信号来实现的,即汽车行驶过程中轮子每转一周会通过内部的霍尔传感器送给系统一对差分信号,系统通过信号采集模块获得一个对应的脉冲信号,通过对该脉冲信号计数,以及已知的轮子直径信息计算,得到车子的运行速度。为了防止汽车围环境的干扰,切断输入和输出通道间直接的电信号联系,本系统采用了光电隔离电路。采集到的车速脉冲信号由单片机P89C51的外部中断TNX0捕捉进行采集。另外用定时器记录脉冲的输出间隔,从而计算出里程、车速等实时数据,用以保存和输出。2 )开关量信号采集。开关量信号包括车门、左灯、右灯、倒车灯、远光灯、近光灯、刹车、汽车喇叭等信号。这些开关信号先经过TLP521光耦隔离处理后直接输入到单片机P89C51的P1口。系统每隔0.2s对开关量信号和1路脉冲信号采集一次,处理器只要将P1口的状态直接读入就可以了。 3.4实时时钟模块 在前面对系统的功能指标要求中提到数据记录容量要求在0 ̄240小时,数据存储时间在掉电情况下要求至少保存10年以上。为了准确地记录车辆行驶状态,并对异常情况下的断电时间进行记录,因此选择实时时钟芯片来提供日期和时间。本系统中选用DALLAS半导体公司的芯片DS12887,DS12887实时时钟芯片可以产生详细的时间和日期信息,可以记录汽车信息过程中各种状态发生时对应的时间信息,它可以满足系统的功能要求。 3.5数据存储模块 汽车记录仪的核心功能就是完成汽车在行驶过程中的各种状态参量数据的及时记录,并对这些数据进行可靠的存储保护。本系统对数据的存储器要求很高,需要从以下几个方面考虑:1)掉电后数据需要保存;2)可擦写次数多;3)可靠性高。故本系统采用了Atmel公司生产的串行大容量可擦写的可编程存储器AT24C512芯片作为数据存储模块。 3.6显示和键盘模块 1)键盘模块。键盘是单片机应用系统最常用的输入设备,可以通 过键盘向系统输入一些信息,如设计人员通过键盘向单片机系统输入指令、地址和数据等,实现简单的人际通信。在本系统中,键盘主要是用来输入驾驶员和车辆的一些信息等,它是由单片机控制的。2)液晶显示模块。本系统要求能够进行字符、数字和汉字的显示,因此选用了内含KS0108B/HD61202控制器的图形液晶显示器GXM12864,它是一种采用低功耗CMOS技术实现的点阵图形LCD模块,有8位微处 196
世界无人机大全 诺斯罗普·格鲁曼公司的RQ-4A“全球鹰”是美国空军乃至全世界最先进的无人机。作为“高空持久性先进概念技术验证”(ACTD)计划的一部分,包括“全球鹰”和“暗星”两个部分在内的“全球鹰”计划于1995年启动。ACTD计划最初由国防先进研究项目处管理,1998年10月转由怀特·帕特森空军基地的空军系统计划办公室接管。后来“暗星”计划于1999年1月取消。“全球鹰”的研制计划分为三部分:设计,研制与试验,部署和评估。相关厂商包括电气系统ES公司,信息科技IT公司,综合系统IS 公司,舰船系统和构成公司。 贴子相关图片:
2 Northrop Grumman 公司已经从机身制造公司Schweizer航空器集团接收了第一架RQ-8A配备火力的垂直升降无人侦察机. Northrop Grumman公司正在试飞一架此型飞机的有人驾驶型号来测试其执行任务的能力. 此型飞机将提供给美国海军和海军陆战队来实施侦察,位置预料和支持目标精确打击.此型飞机能在任何配有航空装置的战舰和狭小的陆
地上起飞.它配有电子红外传感器和激光指示器,能覆盖从起飞地方圆110海里的区域. 第一批此型飞机将配给海军陆战队,包括三架飞机,两个地面控制基地,一套数据连接系统,远程数据终端等设施. 贴子相关图片: 3 据AAI公司称,“影子-200”无人机参与了许多著名的战斗,其中之一是捕获了绰号为"金刚石之王"的萨达姆高级副官之一,在另一次战斗中,“影子”无人机完成了侦察任务,从而使美国部队成功解除了一支支持萨达姆的伊朗游击队武装。
由于“影子-200”无人机在飞行中噪声大,部队将该无人机命名为“尖叫魔鬼”。不过,在作战期间,这种无隐身的飞机倒能提供心理上的优势。 贴子相关图片: 4 用途:战场侦察、目标指引、火力校正(AS90和MLRS) 制造商:英国GEC-马可尼航空有限公司
自动驾驶仪系统 2.1自动驾驶仪的功能 自动驾驶仪的基本功能可列举如下: (1)自动保持三轴稳定,具体地说,及自动保持偏航角,俯仰角于某一希望角度,倾斜角保持为零进行直线飞行(平直飞行,爬高,下滑)。 (2)驾驶员可以通过旋钮或其他控制器给定任意航向或俯仰角,使飞机自动改变航向并稳定于该航向,或使飞机上仰或下俯并保持给定俯仰角。 (3)自动保持飞机进行定高飞行。 (4)驾驶员通过控制器操纵飞机自动爬高或俯冲,达到某一预定高度,然后保持这一预定高度。 上述所有基本功能都是指自动驾驶仪与飞机处于正常状态的控制功能。辅助功能如下: (1)一旦自动驾驶仪的舵机处于卡死或无法操作的状态时,应允许驾驶员具有超控的能力。 (2)自动回零功能。在投入自动驾驶仪之前,飞机本身处于平直飞行的配平状态,必须让自动驾驶仪的反馈信息与测量元件的总和信号回零,才能避免投入后形成误动作。 (3)B IT功能。一种机内自检测功能,在自动驾驶仪的部件及系统中,可设置BIT检测信号,借以检查某部件或全系统工作是否
正常。这种检查可在自动驾驶仪投入前进行。 (4)M a数配平功能。飞机在跨声速区,升降舵操纵特性有一个正梯度区,从而操纵特性不稳定,设立Ma数配平系统控制水平安定面,以改善其操纵特性。 2.2自动驾驶仪的分类 自动驾驶仪最常用的分类方法是按控制律来区分。所谓控制律通常是指自动驾驶仪输出的舵偏角与信号的静动态函数关系。按这种分类方法,可分为比例式自动驾驶仪、积分式自动驾驶仪和均衡式反馈自动驾驶仪(比例加积分控制律的自动驾驶仪)三种。 其次也可以按自动驾驶仪三种主要部件(传感器,计算与放大元件以及舵机)的能源来分,这时可以分为气动式(早期应用过),气动液压式,电动式以及电动液压式。 如果按处理信号,实现控制律是采用连续信号,还是中间经过数字化再转换成为模拟信号来区分,可以分为模拟式与数字式两种。 2.2.1比例式自动驾驶仪 以俯仰通道为例,升降舵偏角增量与飞机俯仰角偏差成比例的自动控制器称为比例式自动驾驶仪。 δ?e=Lθ(θ? - θ?g)(产生控制力矩)
本科毕业论文(设计)题目:基于STM32的汽车行驶记录仪的设计与实现 姓名: 学号: 专业: 院系: 指导老师: 职称学位: 完成时间: 教务处制
基于STM32的汽车行驶记录仪的设计与实现 摘要 汽车行驶记录仪是一种电子式记录设备,它对车辆行驶的时间、速度、里程以及车辆行驶的状态信息进行采集、记录、存储。汽车行驶记录仪的使用,对疲劳驾驶、超速行驶等驾驶员不良驾驶习惯能够起到约束作用,对保障车辆的安全行驶,分析和鉴定交通事故原因上具有重要的作用。 本次设计中设计了一款基于STM32的汽车行驶记录仪,主要采用STM32F103单片机为主控单元,以OV7670摄像头模块为图像采集模块,以SD卡位数据存储模块。控制系统以一定的间隔收集摄像头模块采集到的图像数据,并进行存储,实现实时的图像收集;通过将SD卡插入电脑端即可对系统实时拍摄并存储的图像信息进行查看。除此之外,可以通过串口工具实时监控系统的数据传输过程,使得抽象的数据采集、数据存储、数据调用变的更加形象、具体。本次设计的汽车行驶记录仪具有实时性好,可靠性和性价比高的特点。 关键词:汽车行驶记录仪;实时监控;STM32;SD卡
Research On Vehicle Traveling Data Recorder Based On STM32 Abstract Vehicle traveling data recorder is an electronic recording device, its vehicle travel time, speed, mileage and vehicle status information collection, recording, storage. Bad driving habits vehicle traveling data recorder use, fatigue driving, speeding and so the driver can act as a restraint on the safe driving support vehicles, and has an important role in the analysis and identification of Accidents. The design based on the STM32 designed a vehicle traveling data recorder, mainly STM32F103 microcontroller as the main control unit to the camera module OV7670 image acquisition module to your SD Card data storage module. Control systems at certain intervals to collect the camera module to capture image data, and store real-time collection of images, we can insert the SD card to the computer side of the system in real time and store the captured image information view. In addition, through the serial data transmission system monitoring tool for real-time, making the abstract data acquisition, data storage, data call image becomes more specific. The design of the car recorder with a real-time, high reliability, and cost characteristics. Key Words:vehicle traveling data recorder ,Real-time monitoring,STM32,SD card
第四讲:GCS与无人机自动驾驶仪 ★这一讲的内容,基本以YS09自驾的基本内容来展开。 1.GCS的引进 光看视频监视器,依然不能直观地了解飞机的实时位置信息。这时候可以引入简单的地面站软件系统,利用便携式电脑而不是小电视来显示遥测数据。 有了GCS,就能扩展许多新功能,比如: 功能一:更直观地显示飞机的实时位置。即载入电子地图,显示飞机的实时飞行轨迹; 功能二:指哪飞哪。即,在地图上选定一个点,让飞机飞往该点并绕之盘旋。实际上是盘旋功能的扩展。此外,还有定点盘旋、到达航点后盘旋、云台锁定目标盘旋等扩展方式。 功能三:显示更多有用数据。便携式电脑上能以仪表、数据选项卡(位置可复用)等形式来加强数据显示功能。 功能四:航线功能 有了GCS后,自驾系统可以进一步扩展出一个航线功能。在地图上选定几个航点,根据映射关系知道这几个航点的经纬度数据,然后给每个点预设一个飞行高度,就能生成一条目标航线。把航线数据上传到自驾上,就能让飞机以更精确的方式来执行航拍任务了。 2.航模与无人机有什么关系? (1)RC发射机手动控制与GCS自动控制 简单来理解,无人机尺寸比航模大,载重比航模多,通信距离比航模远,自动化程度比航模高。其中最重要的区别,就是无人机的高度自动化的工作方式。 在航模中,RC发射机是最主要的命令发信源,手动模式是最基本的飞行控制模式,在无人机中,带GCS(Ground Control Station,即地面站软件)的便携式电脑,是最主要的命令发信源,而自动模式才是最基本的飞行控制模式。所谓自动模式,就是,用户在电脑上发出命令,然后通过数据链路(GCS->串口->地面数传电台->机载数传电台->飞行控制器)传到飞机上,由飞机上的飞行控制器分析处理后,再去驱动各执行设备(如舵机)的工作。 可以认为,GCS自动控制是RC发射机手动控制的扩展和延伸。还可以做其他的类比:GCS的遥测数据监视,是OSD的扩展和延伸;GCS的通信协议,是PWM规则的扩展和延伸;GCS的参数设置,是舵机通道感度旋钮的扩展和延伸;等。 (2)有三种通过GCS发出控制命令的方法: ①直接点击某个按钮或菜单,如“开伞”功能,GCS就自动按照专用的通信协议产生一条数字命令; ②先以键盘输入、鼠标动作、RC发射机动作等形式向GCS录入一个或一组数据,然后
汽车行驶记录仪
目次 前言............................................................................... III 引言................................................................................. V 1 范围 (1) 2 规范性引用文件 (1) 3 术语和定义 (1) 4 要求 (2) 4.1 一般要求 (2) 4.2 电气部件 (3) 4.3 电气性能 (4) 4.4 功能要求 (5) 4.5 性能要求 (9) 4.6 数据分析软件 (9) 4.7 数据安全性 (10) 4.8 气候环境适应性 (10) 4.9 机械环境适应性 (10) 4.10 外壳防护等级 (10) 4.11 抗汽车电点火干扰 (10) 4.12 静电放电抗扰度 (10) 4.13 瞬态抗扰性 (10) 5 试验方法 (10) 5.1 一般要求检查 (10) 5.2 电气部件检查 (11) 5.3 电气性能测试 (11) 5.4 功能检查 (12) 5.5 性能测试 (13) 5.6 数据分析软件检查 (14) 5.7 数据安全性检查 (14) 5.8 气候环境适应性试验 (15) 5.9 机械环境试验 (16) 5.10 外壳防护等级试验 (17) 5.11 抗汽车电点火干扰试验 (17) 5.12 静电放电抗扰度试验 (18) 5.13 瞬态抗扰性试验 (18) 6 检验规则 (18) 6.1 型式检验 (18)
6.2 出厂检验 (20) 7 安装 (20) 7.1 新车 (20) 7.2 在用汽车 (20) 7.3 安装位置 (20) 7.4 接线要求 (20) 8 标志、标签和包装 (21) 8.1 标志、标签 (21) 8.2 产品合格证 (21) 8.3 包装 (21) 附录A(规范性附录)RS232串行数据通信协议 (22) 附录B(规范性附录)USB(通用串行总线)数据存储格式 (37) 附录C(规范性附录)驾驶人身份识别IC卡数据存储格式 (39) 附录D(资料性附录)事故疑点数据曲线 (40) 参考文献 (41)
无人机专业考试总结 一、无人机的定义 无人驾驶飞机简称“无人机”,英文缩写为“UAV”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。从技术角度定义可以分为:无人固定翼机、无人垂直起降机、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等。 二、无人机发展史 (一)研制背景 无人机最早在20世纪20年代出现,1914年第一次世界大战正进行得如火如荼,英国的卡德尔和皮切尔两位将军,向英国军事航空学会提出了一项建议:研制一种不用人驾驶,而用无线电操纵的小型飞机,使它能够飞到敌方某一目标区上空,将事先装在小飞机上的炸弹投下去。这种大胆的设想立即得到当时英国军事航空学会理事长戴·亨德森爵士赏识。他指定由A.M.洛教授率领一班人马进行研制。无人机当时是作为训练用的靶机使用的。是一个许多国家用于描述最新一代无人驾驶飞机的术语。从字面上讲,这个术语可以描述从风筝,无线电遥控飞机,到V-1飞弹从发展来的巡航导弹,但是在军方的术语中仅限于可重复使用的比空气重的飞行器。 (二)研发历程 20世纪40年代,二战中无人靶机用于训练防空炮手。 1945年,第二次世界大战之后将多余或者是退役的飞机改装成为特殊研究或者是靶机,成为近代无人机使用趋势的先河。随著电子技术的进步,无人机在担任侦查任务的角色上开始展露他的弹性与重要性。 20世纪55年到74年的越南战争,海湾战争乃至北约空袭南斯拉夫的过程中,无人机都被频繁地用于执行军事任务。 1982年以色列航空工业公司(IAI)首创以无人机担任其他角色的军事任务。在加利利和平行动(黎巴嫩战争)时期,侦察者无人机无人机系统曾经在以色列陆军和以色列空军的服役中担任重要战斗角色。以色列国防军主要用无人机进行侦察,情报收集,跟踪和通讯。 1991年的沙漠风暴作战当中,美军曾经发射专门设计欺骗雷达系统的小型无人机作为诱饵,这种诱饵也成为其他国家效彷的对象。 1996年3月,美国国家航空航天局研制出两架试验机:X-36试验型无尾无人战斗机。该机长5.7米,重88公斤,其大小相当于普通战斗机的28%。该机使用的分列式副翼和转向推力系统比常规战斗机更具有灵活性。水平垂直的机尾既减轻了重量和拉力,也缩小了雷达反射截面。无人驾驶战斗机将执行的理想任务是压制敌防空、遮断、战斗损失评估、战区导弹防御以及超高空攻击,特别适合在政治敏感区执行任务。 20世纪晚期之前,他们不过是比全尺寸的遥控飞机小一些而已。美国军方在这类飞行器上的兴趣不断增长,因为他们提供了成本低廉,极富任务弹性的战斗机器,这些战斗机器可以被使用而不存在机组人员死亡的风险。 20世纪90年代,海湾战争后,无人机开始飞速发展和广泛运用。美国军队曾经购买和自制先锋无人机在对伊拉克的第二次和第三次海湾战争中作为可靠的系统。 20世纪90年代后,西方国家充分认识到无人机在战争中的作用,竞相把高新技术应用到无人机的研制与发展上:新翼型和轻型材料大大增加了无人机的续航时间;采用先进的信号处理与通信技术提高了无人机的图像传递速度和数字化传输速度;先进的自动驾驶仪使无人机不再需要陆基电视屏幕领航,而是按程序飞往盘旋点,改变高度和飞往下一个目标。 三、无人机分类
过载自动驾驶仪的设计 在许多高性能的指令制导或自寻的导弹中,经常能见到由一个加速度计提供主反馈,由一个陀螺仪作为阻尼器的布局结构。一般对于具有两个对称平面的导弹可以采用相同结构的驾驶仪来控制偏航和俯仰运动,因此,可以以一个通道为设计对象,以俯仰通道为例即可。加速度计放置在距离质心前c 处,c 为质心到弹头部距离的12到23,敏感轴为Oy 轴。应当避免放置在弹体主振形即一阶振形的波腹处,否则,颤振引起的反馈信息可能导致弹体结构遭到破坏,如果舵机系统的频带允许能够响应弹体的结构振动频率,舵面的偏转会加剧这一振动。陀螺仪也不应当放置在由于颤振引起的角运动最大的节点处,陀螺仪的敏感轴为Oz 轴,即输出比例于?。 ?FIN SERVO AERODYNAMIC TRANSFER FUNCTION SENSED BY THE ACCELEROMETER 图6.3-1 过载自动驾驶仪基本结构 图6.3-1表示了采取尾舵控制的弹体的驾驶仪的基本结构。首先,忽略陀螺仪和加速度计的动态延迟,在此假定它们的带宽都在80Hz 以上,在感兴趣的频带范围内认为它们造成的延迟都是可以忽略的。第二,假设舵机伺服系统的动力学环节以一个二阶系统来表示已经足够了。第三,分子中的小量()()y z a s s δ可以忽略,即不考虑舵面升力产生的过载,参见公式4.6.7。因此,弹体的传递函数可以定义为稳态增益为a k 的一个二阶系统(穿越频率为m ω,阻尼比为m μ)。在4.6节中建立的尾舵控制的静稳定弹体具备一个负的稳态增益a k 。假设反馈器件的反馈量为正,输入指令减去这些反馈量构成的负反馈,则舵系统增益s k 只能为负。 在不进行一些代数推导的情况下,从系统控制结构图能看出一些问题,首先,该驾驶仪是一个0型闭环系统,为了使闭环系统增益相对于气动增益的变化不敏感,应当使系统开环增益设计在10或更高,系统的开环增益为(/)s a ac g k k k k V +。第二,采取一定增益的反馈回路包围能够使驾驶仪的增益降低和带宽增加,因此一般假设开环系统的穿越频率可以近似为闭环系统的固有频率。例如,设计一个驾驶仪的最小带宽为40/rad s (6.4Hz ),需要明确对于伺服系统需要至少多大的带宽,由于驾驶仪的穿越频率至少在弹体气动自振频率的2到3倍,可以认为弹体气动特性是严重欠阻尼的,因此在驾驶仪的穿越频率附近导致了接近180?的相位滞后。从反馈器件来看,速率陀螺提供了一部分输出反馈为(/)g y k V a ,另外一部分为输
汽车行驶记录仪的设计毕业论文 目录 摘要.................................................................. I Abstract ............................................................. II 第一章绪论.. (1) 1.1 课题研究背景及意义 (2) 1.2 国外的发展状况 (2) 1.2.1国发展 (2) 1.2.2国外发展 (3) 1.3 汽车行驶记录仪在交通管理中的必要性 (4) 1.4 汽车行驶记录仪的分类 (5) 1.5 本文的主要工作 (7) 1.6本章小结 (8) 第二章系统总体方案设计 (9) 2.1系统框图 (9) 2.2主控制器 (10) 第三章系统方案的硬件设计 3.1数据采集单元 (13) 3.2数据存储单元 (15) 3.3液晶显示单元 (20) 第四章系统软件设计 (22) 4.1系统软件整体流程 (22) 4.2数据采集单元 (23) 4.3数据存储单元 (28) 4.4液晶显示单元 (30) 第五章总结 (34)
致谢 (35) 参考文献 (36)
第一章绪论 1.1 课题的研究背景及意义 我国自改革开放以来,道路交通基础设施日益完善,汽车的拥有量也不断增加,交通的发展一方面为社会创造了大量的财富,另一方面也带来了严重的交通隐患。仅2011年我国交通事故死亡人数就超过了20万人。而发达国家则有自己的一套方法,他们为控制机动车安全驾驶,通过立法(如欧盟第3825/85法规)强制安装机械式纸盘汽车行驶记录仪,对遏制疲劳驾驶、车辆超速等交通违章,约束驾驶员的不良驾驶行为,保障安全行车很有效。各级交通部门面对的问题是如何通过科学的方法提高道路交通管理水平,减少事故发生。由于交通管理的复杂性,交通车辆的运行围大,活动围涉及全国各地,管理部门无法随时随地的对车辆进行追踪监控。交通管理部门迫切需要一种可以代替人工对车辆的运行状况和驾驶员的操作情况进行实时监控的电子设备。交通管理中也需要一种能够有效保障车辆安全、提供实时调度管理的产品,使我国的交通管理能够真正迈入智能化时代。而汽车行驶记录仪就是一种能够安装在车辆上全过程同步记录、监控车辆运行状态、预防交通事故发生的高新技术产品。 美国、日本、香港、马来西亚等地都在大量使用汽车行驶记录仪,我国许多大城市的车辆也安装上了汽车行驶记录仪。经过运输企业的使用,事实证明,安装使用汽车行驶记录仪有利于规驾驶员操作,降低汽车公里胎耗、油耗,提高驾驶员安全意识,从而减少应交通事故给企业造成的经济损失。安装汽车行驶记录仪后,运输企业可以依据记录的数据对驾驶员的进行奖励或批评教育甚至是处罚,长期坚持使用汽车行驶记录仪,不仅可以培养驾驶员规操作的良好习惯,还有助于运输企业筛选出经常有不良驾驶行为的个别司机,找出重点监督对象,从而达到“管车、管人、管安全”的目的。 依托6PS服务平台,汽车行驶记录仪不仅能够记录车辆行驶过程中的所有基本信息,还可以与远在千里之外的管理中心实现实时信息交换。在网络系统
YS09无人机自动驾驶仪用户手册 GoogleEarth地图版 零度智控(北京)智能科技有限公司Zero UAV Science & Technology Co.,Ltd. https://www.doczj.com/doc/d669372.html, 2011 年12月编制
目录 目录 (2) 一、简介 (4) 1、系统特性 (4) 2、阅读指南 (5) 二、系统原理示意图 (6) 三、产品清单 (7) 四、机载飞控系统 (8) 1、硬件简介 (8) 1.1核心板外观 (8) 1.2 飞控盒外观 (9) 2、安装指南 (9) 3 飞控接口 (10) 4.其他部分 (14) 4.1电源 (14) 4.2通讯链路 (14) 4.3 GPS (16) 4.4 空速 (17) 4.5 转速传感器 (17) 4.6 熄火开关 (17) 五、地面站系统 (18) 1、硬件说明 (18) 2、软件简介 (19) 3、软件安装 (19) 4、软件详解 (19) 5、操作说明 (21) 5.1 菜单栏 (22) 5.2 工具栏 (35) 5.3 状态栏 (36) 5.4 仪表状态 (39) 5.5 控制区域 (40) 5.6 地图区域 (43) 6、飞行控制方式 (44) 六、相关功能介绍 (44) 1、参数调整 (44) 2、任务载荷说明 (50) 3、高度调整 (54) 4、开关接收机 (54) 5、开伞、停车功能键 (55) 6、自动生成航线说明 (55) 七、现场调试(重要) (58) 1、开机步骤 (58) 2、手操阶段注意内容 (60)
3、紧急状况处理 (62) 八、简易飞行流程参考 (63) 九、典型应用及免责声明 (64) 1、典型应用 (64) 2、免责声明 (65) 附录 (67)
安全管理编号:YTO-FS-PD858 国内外汽车行驶记录仪应用概况通用 版 In The Production, The Safety And Health Of Workers, The Production And Labor Process And The Various Measures T aken And All Activities Engaged In The Management, So That The Normal Production Activities. 标准/ 权威/ 规范/ 实用 Authoritative And Practical Standards
国内外汽车行驶记录仪应用概况通 用版 使用提示:本安全管理文件可用于在生产中,对保障劳动者的安全健康和生产、劳动过程的正常进行而采取的各种措施和从事的一切活动实施管理,包含对生产、财物、环境的保护,最终使生产活动正常进行。文件下载后可定制修改,请根据实际需要进行调整和使用。 一、国外汽车行驶记录仪应用概况 汽车行驶记录仪制造和应用的发源地在欧洲。早在20世纪20年代,行驶记录仪便伴随着汽车里程表而诞生,当时是和汽车速度、里程表结合在一起的。随着汽车工业的快速发展,记录仪开始在汽车运营中得到自发性的广泛应用。1934年,德国发明了世界上第一台纸盘式行驶记录仪,至今已有70年的历史。为了保障道路交通安全运输,1953年,德国政府开始对载重超过7吨的货车和客车强制推行纸盘式行驶记录仪。自1970年起,当时的欧共体开始推广德国的经验,在德国、法国、意大利、比利时、卢森堡6个成员国强制推行行驶记录仪。1992年欧盟成立,原欧共体有关记录仪应用的各项法规继续有效。目前,欧盟已制定颁布了分别规范驾驶员驾驶时间、纸盘式记录仪技术性能、数字式记录仪技术性能、监督企业和实施路面执法的5个主要法规,15个成员国500多万辆商用车安装了纸盘式行驶记录仪,是世界上使用纸盘式行驶记录仪最多
自动驾驶仪,自动油门,飞行指挥仪 *** Intended For Flight Simulation Use ONLY * 仅供飞行模拟使用* 本文中所有术语的翻译,均以英文原文为准。*** 什么是自动驾驶系统? 自动驾驶系统(自动驾驶仪),是一种通过飞行员按一些按钮和旋转一些旋钮,或者由导航设备接收地面导航信号,来自动控制飞行器完成三轴动作的装置。不同型号的飞机所装备的自动驾驶仪可能会有一些小的差别,但是大体相似。 自动驾驶系统能做些什么? 在FS2004里,Cessna 和Beechcraft Baron 58 装备的自动驾驶仪具有以下功能: ?保持机翼水平,不发生滚转。 ?保持飞机当前的仰俯角。 ?保持选定的飞行方向。 ?保持选定的飞行高度。 ?保持选定的上升率或下降率。 ?跟踪一个VOR电波射线(Radial)。 ?跟踪一个定位信标(Localizer)或反向航路定位信标(Localizer Back Course)。 ?跟踪仪器降落系统(Instrument Landing System)的定位信标和下滑道指示信标(Glide Slope)。 ?跟踪一个GPS航路。 在FS2004中,Beechcarft King Air 350, Bombardier Learjet 45, 和所有的Boeing 喷气机,都装备有自动飞行控制系统,包括自动驾驶仪,自动油门(自动节流阀门)和飞行指挥仪。这套系增加了以下功能: ?保持一个选定的飞行速度(空速或地速)。 ?消除有害的偏航。 ?帮助飞行员正确的手动控制飞机。 在FS2004中,有些机型或面板上,提供更多的自动驾驶仪操作功能: ?飞行管理计算机(Flight Management Computers) ?垂直方向导航(Vertical Navigation) ?横向导航(Lateral Navigation) ?飞行水平改变(Flight Level Change) ?机轮控制(Control Wheel Steering) ?自动降落(Autoland)
嵌入式技术电子测量技术 ELECT RON IC MEASU REMENT T ECH N OLOGY 第34卷第3期2009年3月 多功能汽车行驶记录仪的系统设计 彭李明连迅 (武汉理工大学武汉430079 摘要:本文详细阐述了多功能汽车行驶记录仪的技术要求,并提出了解决方案,该系统集数据记录存储、数据采集、数据统计分析为一体。本文着重分析了汽车行驶记录仪的硬件结构设计和软件流程设计,并对原型样机进行了性能和功能测试,对记录仪今后的发展进行了展望。 关键词:ARM;嵌入式系统;汽车行驶记录仪 中图分类号:T P2文献标识码:A System design about multi2function vehicle traveling data recorder P eng Liming Lian Xun (Wuhan U niver sity of T echnology,Wuhan430079 Abstr act:Vehicle T raveling Data Recorder(VTDRis a digital electronic device,which can r ecord vehicle speed,r eal t ime,mileage and vehicle p s other status informat ion.In spite of owning the advanced technique,the aboar d t raveling recorders ar e unfit for our count ry in applicability and price.It is urgent ly necessary to design and produce the pr oducts. I n this article,a Vehicle Traveling Data Recorder system is int roduced in details about technology r equirement and achievement.The author discusses the Vehicle T
学习情景1 课程导论 1.飞行控制系统发展概述 自动飞行控制系统已有100多年的研制历史,早在有人驾驶飞机出现之前,自动飞行装置即已出现。 1.1方向稳定器 1873年,法国雷纳德(C.C.Renard)无人多翼滑翔机的方向稳定器。 1.2 电动陀螺稳定装置-姿态稳定 1914年,美国的爱莫尔·斯派雷(Eimer Sperry)研制成功第一台可以保持飞机稳定平飞的电动陀螺稳定装置,该装置利用陀螺的稳定性和进动性,建立一个测量基准,用来测量飞机的姿态,它和飞机的控制装置连在一起,一旦飞机偏离指定的状态,这个机构就通过飞机的控制装置操纵飞机的舵面偏转使飞机恢复到原来的状态。 1.3 自动驾驶仪 20世纪30年代出现了可以控制和保持飞机高度、速度和航迹的自动驾驶仪。 第二次世界大战促使自动驾驶仪等设备得到进一步发展,由过去气动-液压到全电动,由三个陀螺分别控制三个通道改用一个 或两个陀螺来操纵飞机,并可作机动、爬高及自动保持高度等。 二次大战期间,美国和原苏联相继研制出功能较完善的电气式自动驾驶仪C-1和其仿制品A∏-5; 德国在二战后期研制成功飞航式导弹V-1和弹道式导弹V-2,
更进一步促进了飞行自动控制装置的研制和发展。 20世纪50年代后,和导航系统、仪表着陆系统相联,自动驾驶装置实现了长距离自动飞行和自动着陆。 1.4 自动飞行控制系统 1947年成功突破音障后,飞机的飞行包线(飞行速度和高度的变化范围)扩大,越来越复杂的飞行任务对飞机性能的要求也越来越高,仅靠气动布局和发动机设计所获得的飞机性能已经很难满足复杂飞行任务的要求。因此,借助于自动控制技术来改善飞机稳定性的飞行自动控制装置(如增稳系统)相继问世,在此基础上,自动驾驶仪的功能得到进一步的扩展,发展成为自动飞行控制系统(AFCS)。 20世纪60年代,产生了随控布局飞行器(congtrol configured vehicle--CCV)的设计思想。 20世纪60年代前的以模拟电路或模拟计算机为主要计算装置的飞行控制系统,逐渐发展成为现在已普遍应用的数字式飞行控制系统,这也为新技术应用和更复杂更完善系统的综合提供了实现的可能性。例如: 主动控制技术(active control technology—ACT); 余度技术 容错控制技术 20世纪80年代得到迅速发展的火/推/飞综合控制系统等。 20世纪70年代中期,由于计算机的应用使自动驾驶仪和飞机的指引系统组成一个综合系统,使飞机的各种传感器数据、指