
AAC解码算法原理详解 原作者:龙帅 (loppp138@https://www.doczj.com/doc/5b12460780.html,) 此文章为便携式多媒体技术中心提供,未经站长授权,严禁转载,但欢迎链接到此地址。 本文详细介绍了符合ISO/IEC 13818-7(MPEG2 AAC audio codec) , ISO/IEC 14496-3(MPEG4 Audio Codec AAC Low Complexity)进行压缩的的AAC音频的解码算法。 1、程序系统结构 下面是AAC解码流程图: AAC解码流程图 在主控模块开始运行后,主控模块将AAC比特流的一部分放入输入缓冲区,通过查找同步字得到一帧的起始,找到后,根据ISO/IEC 13818-7所述的语法开始进行Noisless Decoding(无噪解码),无噪解码实际上就是哈夫曼解码,通过反量化(Dequantize)、联合立体声(Joint Stereo),知觉噪声替换(PNS),瞬时噪声整形(TNS),反离散余弦变换(IMDCT),频段复制(SBR)这几个模块之后,得出左右声道的PCM码流,再由主控模块将其放入输出缓冲区输出到声音播放设备。
2. 主控模块 主控模块的主要任务是操作输入输出缓冲区,调用其它各模块协同工作。其中,输入输出缓冲区均由DSP控制模块提供接口。输出缓冲区中将存放的数据为解码出来的PCM数据,代表了声音的振幅。它由一块固定长度的缓冲区构成,通过调用DSP控制模块的接口函数,得到头指针,在完成输出缓冲区的填充后,调用中断处理输出至I2S接口所连接的音频ADC芯片(立体声音频DAC和DirectDrive 耳机放大器)输出模拟声音。 3. 同步及元素解码 同步及元素解码模块主要用于找出格式信息,并进行头信息解码,以及对元素信息进行解码。这些解码的结果用于后续的无噪解码和尺度因子解码模块。 AAC的音频文件格式有以下两种: ADIF:Audio Data Interchange Format 音频数据交换格式。这种格式的特征是可以确定的找到这个音频数据的开始,不需进行在音频数据流中间开始的解码,即它的解码必须在明确定义的开始处进行。故这种格式常用在磁盘文件中。 ADTS:Audio Data Transport Stream 音频数据传输流。这种格式的特征是它是一个有同步字的比特流,解码可以在这个流中任何位置开始。它的特征类似于mp3数据流格式。 AAC的ADIF格式见下图: 3.1 ADIF的组织结构 AAC的ADTS的一般格式见下图: 3.2 ADTS的组织结构 图中表示出了ADTS一帧的简明结构,其两边的空白矩形表示一帧前后的数据。ADIF和ADTS的header是不同的。它们分别如下所示:
模式匹配的KMP算法详解 模式匹配的KMP算法详解 这种由D.E.Knuth,J.H.Morris和V.R.Pratt同时发现的改进的模式匹配算法简称为KMP算法。大概学过信息学的都知道,是个比较难理解的算法,今天特把它搞个彻彻底底明明白白。 注意到这是一个改进的算法,所以有必要把原来的模式匹配算法拿出来,其实理解的关键就在这里,一般的匹配算法: int Index(String S,String T,int pos)//参考《数据结构》中的程序 { i=pos;j=1;//这里的串的第1个元素下标是1 while(i<=S.Length && j<=T.Length) { if(S[i]==T[j]){++i;++j;} else{i=i-j+2;j=1;}//**************(1) } if(j>T.Length) return i-T.Length;//匹配成功 else return 0; } 匹配的过程非常清晰,关键是当‘失配’的时候程序是如何处理的?回溯,没错,注意到(1)句,为什么要回溯,看下面的例子: S:aaaaabababcaaa T:ababc aaaaabababcaaa ababc.(.表示前一个已经失配) 回溯的结果就是 aaaaabababcaaa a.(babc) 如果不回溯就是 aaaaabababcaaa aba.bc 这样就漏了一个可能匹配成功的情况 aaaaabababcaaa ababc 为什么会发生这样的情况?这是由T串本身的性质决定的,是因为T串本身有前后'部分匹配'的性质。如果T为abcdef这样的,大没有回溯的必要。
蚁群算法浅析 摘要:介绍了什么是蚁群算法,蚁群算法的种类,对四种不同的蚁群算法进行了分析对比。详细阐述了蚁群算法的基本原理,将其应用于旅行商问题,有效地解决了问题。通过对旅行商问题C++模拟仿真程序的详细分析,更加深刻地理解与掌握了蚁群算法。 关键词:蚁群算法;旅行商问题;信息素;轮盘选择 一、引言 蚁群算法(Ant Colony Optimization, ACO),是一种用来在图中寻找优化路径的算法。它由Marco Dorigo于1992年在他的博士论文中提出,其灵感来源于蚂蚁在寻找食物过程中发现路径的行为。蚁群算法是一种模拟进化算法,初步的研究表明该算法具有许多优良的性质。 蚁群算法成功解决了旅行商问题(Traveling Salesman Problem, TSP):一个商人要到若干城市推销物品,从一个城市出发要到达其他各城市一次而且最多一次最后又回到第一个城市。寻找一条最短路径,使他从起点的城市到达所有城市一遍,最后回到起点的总路程最短。若把每个城市看成是图上的节点,那么旅行商问题就是在N个节点的完全图上寻找一条花费最少的回路。 最基本的蚁群算法见第二节。目前典型的蚁群算法有随机蚁群算法、排序蚁群算法和最大最小蚁群算法,其中后两种蚁群算法是对前一种的优化。本文将终点介绍随机蚁群算法。 二、基本蚁群算法 (一)算法思想 各个蚂蚁在没有事先告诉他们食物在什么地方的前提下开始寻找食物。当一只找到食物以后,它会向环境释放一种信息素,信息素多的地方显然经过这里的蚂蚁会多,因而会有更多的蚂蚁聚集过来。假设有两条路从窝通向食物,开始的时候,走这两条路的蚂蚁数量同样多(或者较长的路上蚂蚁多,这也无关紧要)。当蚂蚁沿着一条路到达终点以后会马上返回来,这样,短的路蚂蚁来回一次的时间就短,这也意味着重复的频率就快,因而在单位时间里走过的蚂蚁数目就多,洒下的信息素自然也会多,自然会有更多的蚂蚁被吸引过来,从而洒下更多的信息素。因此,越来越多地蚂蚁聚集到较短的路径上来,最短的路径就找到了。 蚁群算法的基本思想如下图表示:
在前面的图文中,我们讲了“串”这种数据结构,其中有求“子串在主串中的位置”(字符串的模式匹配)这样的算法。解决这类问题,通常我们的方法是枚举从A串(主串)的什么位置起开始与B串(子串)匹配,然后验证是否匹配。假设A串长度为n,B串长度为m,那么这种方法的复杂度是O(m*n)的。虽然很多时候复杂度达不到m*n(验证时只看头一两个字母就发现不匹配了),但是我们有许多“最坏情况”,比如: A=“aaaaaaaaaaaaaaaaaaaaaaaaab”,B=“aaaaaaaab”。 大家可以忍受朴素模式匹配算法(前缀暴力匹配算法)的低效吗?也许可以,也许无所谓。 有三位前辈D.E.Knuth、J.H.Morris、V.R.Pratt发表一个模式匹配算法,最坏情况下是O(m+n),可以大大避免重复遍历的情况,我们把它称之为克努特-莫里斯-普拉特算法,简称KMP算法。 假如,A=“abababaababacb”,B=“ababacb”,我们来看看KMP是怎样工作的。我们用两个指针i和j分别表示,。也就是说,i是不断增加的,随着i 的增加j相应地变化,且j满足以A[i]结尾的长度为j的字符串正好匹配B串的前j个字符(j当然越大越好),现在需要检验A[i+1]和B[j+1]的关系。 例子: S=“abcdefgab” T=“abcdex” 对于要匹配的子串T来说,“abcdex”首字符“a”与后面的串“bcdex”中任意一个字符都不相等。也就是说,既然“a”不与自己后面的子串中任何一字符相等,那么对于主串S来说,前5位字符分别相等,意味着子串T的首字符“a”不可能与S串的第2到第5位的字符相等。朴素算法步骤2,3,4,5的判断都是多余,下次的起始位置就是第6个字符。 例子: S=“abcabcabc” T=“abcabx”
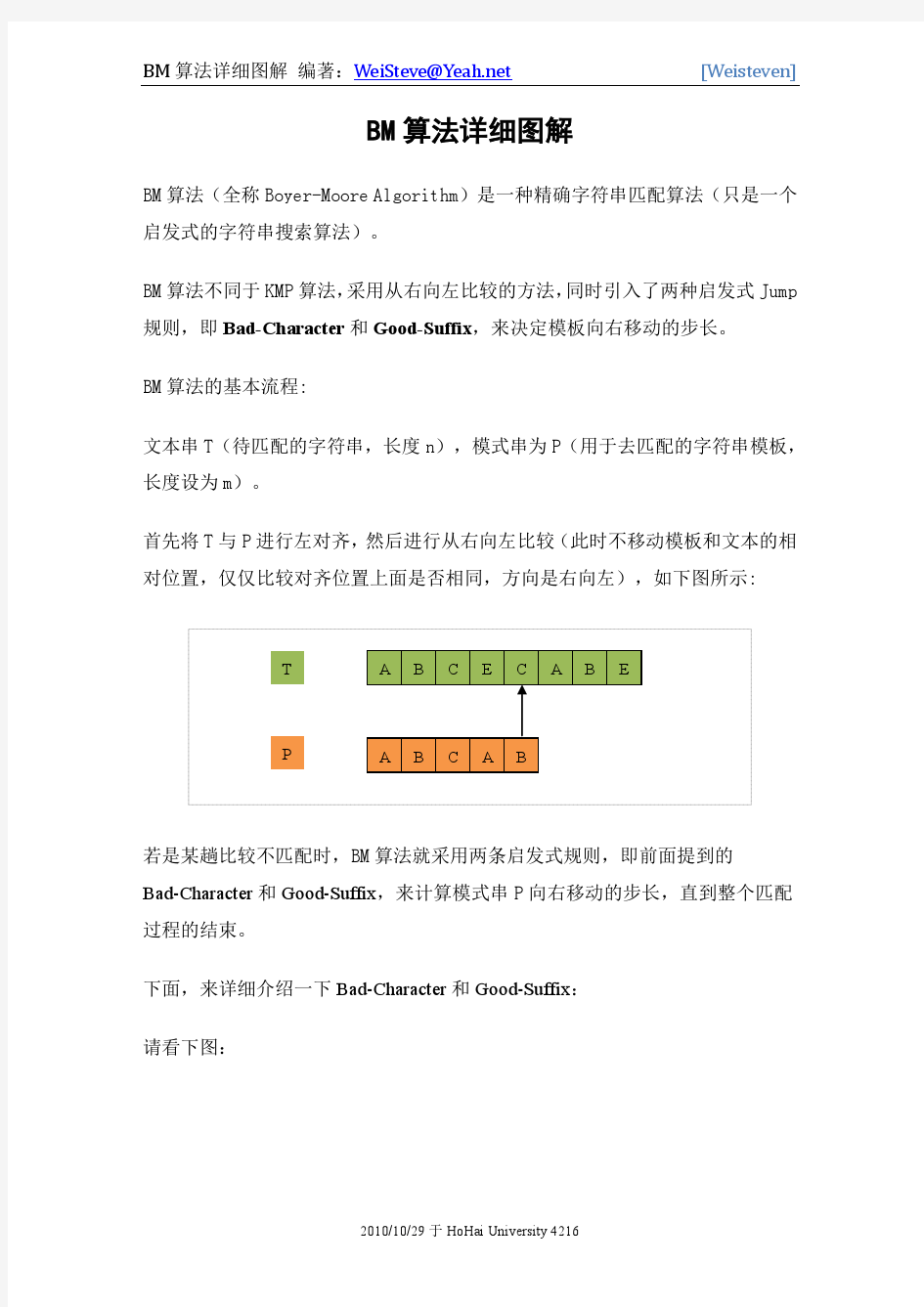
五、详细设计 #include int KMPFindImprove(String &P); //改进的KMP匹配算法 void Output2(); //输出子串在主串中出现的位置 }; int String::KMPFindImprove(String &P) { int sum=0; int j=KMPFindImprove(0,P); while(j!=-1) { count[sum++]=j; if(j<=n-P.n) j=KMPFindImprove(j+P.n,P); } return sum; } void String::Output2() //输出子串在主串中的位置 { int i=0; while(count[i]!=count[i+1] && i 蚁群算法,PSO算法以及两种算法可以融合的几种方法 蚁群算法(ACO)是受自然界中蚂蚁搜索食物行为的启发,是一种群智能优化算法。它基于对自然界真实蚁群的集体觅食行为的研究,模拟真实的蚁群协作过程。算法由若干个蚂蚁共同构造解路径,通过在解路径上遗留并交换信息素提高解的质量,进而达到优化的目的。蚁群算法作为通用随机优化方法,已经成功的应用于TSP等一系列组合优化问题中,并取得了较好的结果。但由于该算法是典型的概率算法,算法中的参数设定通常由实验方法确定,导致方法的优化性能与人的经验密切相关,很难使算法性能最优化。 蚁群算法中每只蚂蚁要选择下一步所要走的地方,在选路过程中,蚂蚁依据概率函数 选择将要去的地方,这个概率取决于地点间距离和信息素的强度。(t+n) = (t)+ Δ (t+n) 上述方程表示信息素的保留率,1-表示信息素的挥发率,为了防止信息的无限积累,取值范围限定在0~1。Δ ij 表示蚂蚁k在时间段t到(t +n)的过程中,在i到j的路径上留下的残留信息浓度。 在上述概率方程中,参数α和β:是通过实验确定的。它们对算法性能同样有很大的影响。α值的大小表明留在每个节点上信息量受重视的程度,其值越大,蚂蚁选择被选过的地点的可能性越大。β值的大小表明启发式信息受重视的程度。 这两个参数对蚁群算法性能的影响和作用是相互配合,密切相关的。但是这两个参数只能依靠经验或重复调试来选择。 在采用蚁群-粒子群混合算法时,我们可以利用PSO对蚁群系统参数α和β的进行训练。 具体训练过程:假设有n个粒子组成一个群落,其中第i个粒子表示为一个二维的向量xi = ( xi1 , xi2 ) , i = 1, 2, ?,n,即第i个粒子在搜索空间的中的位置是xi。换言之,每个粒子的位置就是一个潜在的解。将xi带入反馈到蚁群系统并按目标函数就可以计算出其适应值,根据适应值的大小衡量解的优劣。 蚁群算法的优点: 蚁群算法与其他启发式算法相比,在求解性能上,具有很强的鲁棒性(对基本蚁群算法模型稍加修改,便可以应用于其他问题)和搜索较好解的能力。 蚁群算法是一种基于种群的进化算法,具有本质并行性,易于并行实现。 蚁群算法很容易与多种启发式算法结合,以改善算法性能。 智能车P I D算法实现 原理讲解 为了实现PID控制所需要的等间隔采样,我们使用了一个定时中断,每2ms进行一次数据采样和PID计算。与此并行,系统中还设计了一个转速脉冲检测中断,从而实现了转速检测。为了调试的需要,程序中还在main{}函数中加入了相关的调试代码,这部分代码有最低的优先级,可以在保证不影响控制策略的情况下实现发送调试数据等功能。检测环节对整个控制系统的质量起到至关重要的作用 4.3.2 PID控制调整速度 本系统采用的是增量式数字PID控制,通过每一控制周期(10ms)读入脉冲数间接测得小车当前转速vi_FeedBack,将vi_FeedBack与模糊推理得到的小车期望速度vi_Ref比较,由以下公式求得速度偏差error1与速度偏差率d_error。 error1 = vi_Ref– vi_FeedBack; (公式3) d_error = error1 –vi_PreError; (公式4)公式4中, vi_PreError为上次的速度偏差。考虑到控制周期较长,假设按2.5m/s的平均速度计算,则一个控制周期小车大概可以跑过2.5cm,如果按这种周期用上述PID调节速度,则会导致加速减速均过长的后果,严重的影响小车的快速性和稳定性。为了解决这个问题,可以在PID调速控制中加入BANG-BANG控制思想:根据error1的大小,如果正大,则正转给全额占空比;如果负大,则自由停车或给一个反转占空比;否则就采用PID计算的占空比。 PID控制算法 为了使赛车平滑得保持在黑线中央,即使赛车的偏移量平滑地保持在0,实用了PID控制算法。 P为比例参数,D为微分参数。基准值为0,PID输入为水平偏移量X0,PID输出为转角,转角方向:向左转为正,向右转为负。 P参数在智能车控制器中表示水平偏差量的权,D参数在智能车控制器中表示水平偏差速度的权。 水平偏差量直接反映了赛车偏离黑线的程度,例如赛车偏向黑线的左边越厉害,则赛车的右转角度将越大。水平偏差量,是PID控制器的P部分。 水平偏差速度则直接反映了赛车的运动倾向,因为有了赛车的水平偏差速度,对赛车的掌握,将更加精确。例如赛车偏向黑线左边,然而它的运动方向是向右的,那么,他的转角将比向左运动时的转角要小,因为,我知道赛车已经开始朝正确的方向调整了。水平偏差速度,是PID控制器的D部分。 通过两个相隔一定采样时间的水平偏差量的差,来得到赛车的水平偏差速度。然而,这个时间间隔多少比较合适呢? 实验三串的模式匹配 一、实验目的 1.利用顺序结构存储串,并实现串的匹配算法。 2.掌握简单模式匹配思想,熟悉KMP算法。 二、实验要求 1.认真理解简单模式匹配思想,高效实现简单模式匹配; 2.结合参考程序调试KMP算法,努力算法思想; 3.保存程序的运行结果,并结合程序进行分析。 三、实验内容 1、通过键盘初始化目标串和模式串,通过简单模式匹配算法实现串的模式匹配,匹配成功后要求输出模式串在目标串中的位置; 2、参考程序给出了两种不同形式的next数组的计算方法,请完善程序从键盘初始化一目标串并设计匹配算法完整调试KMP算法,并与简单模式匹配算法进行比较。 参考程序: #include "stdio.h" void GetNext1(char *t,int next[])/*求模式t的next值并寸入next数组中*/ { int i=1,j=0; next[1]=0; while(i<=9)//t[0] { if(j==0||t[i]==t[j]) {++i; ++j; next[i]=j; } else j=next[j]; } } void GetNext2(char *t , int next[])/* 求模式t 的next值并放入数组next中 */ { int i=1, j = 0; next[1]= 0; /* 初始化 */ while (i<=9) /* 计算next[i+1] t[0]*/ { while (j>=1 && t[i] != t[j] ) j = next[j]; i++; j++; if(t[i]==t[j]) next[i] = next[j]; else next[i] = j; } } void main() { char *p="abcaababc"; int i,str[10]; GetNext1(p,str); printf("\n"); for(i=1;i<10;i++) printf("%d",str[i]); GetNext2(p,str); printf("\n"); for(i=1;i<10;i++) printf("%d",str[i]); printf("\n\n"); } 实验四:KMP算法实验报告 一、问题描述 模式匹配两个串。 二、设计思想 这种由D.E.Knuth,J.H.Morris和V.R.Pratt同时发现的改进的模式匹配算法简称为KM P算法。 注意到这是一个改进的算法,所以有必要把原来的模式匹配算法拿出来,其实理解的关键就在这里,一般的匹配算法: int Index(String S,String T,int pos)//参考《数据结构》中的程序 { i=pos;j=1;//这里的串的第1个元素下标是1 while(i<=S.Length && j<=T.Length) { if(S[i]==T[j]){++i;++j;} else{i=i-j+2;j=1;}//**************(1) } if(j>T.Length) return i-T.Length;//匹配成功 else return 0; } 匹配的过程非常清晰,关键是当‘失配’的时候程序是如何处理的?为什么要回溯,看下面的例子: S:aaaaabababcaaa T:ababc aaaaabababcaaa ababc.(.表示前一个已经失配) 回溯的结果就是 aaaaabababcaaa a.(babc) 如果不回溯就是 aaaaabababcaaa aba.bc 这样就漏了一个可能匹配成功的情况 aaaaabababcaaa ababc 这是由T串本身的性质决定的,是因为T串本身有前后'部分匹配'的性质。如果T为a bcdef这样的,大没有回溯的必要。 改进的地方也就是这里,我们从T串本身出发,事先就找准了T自身前后部分匹配的位置,那就可以改进算法。 如果不用回溯,那T串下一个位置从哪里开始呢? 还是上面那个例子,T为ababc,如果c失配,那就可以往前移到aba最后一个a的位置,像这样: 《算法与程序设计》导学 一、编程的步骤: 启动VB——标准EXE——对象——属性——代码——调试——保存——生成EXE 1、VB窗口组成:控件工具箱、对象窗口、工程窗口、属性窗口、代码窗口 2、对象:标签(Label)、文本框(text)、命令按钮(command) 计时器(timer)、简单图形(shape) 3、属性:caption(标题) 4、保存:窗体文件(.frm)、工程文件(.vbp) 二、算法的特征: 1、有穷性 2、确定性 3、能行性 4、有0个或多个输入 5、有1个或多个输出 三、算法的表示: 1、自然语言 2、流程图 (1)标准:GB1526—89、ISO5807-1985 (2)常用符号: 3、计算机语言(伪代码) 四、算法的三种基本结构: 1、顺序模式: 2、选择模式: 3、循环模式: 五、四种基本算法: 1、枚举算法:(循环模式的应用) (1)、把问题所有可能的解全部列举出来,在列举的过程式中根据条件进行判断,满足条件的则是问题真正的解,不满足的去掉。 (2)、包装问题的分析及流程图: 2、解析算法:(公式求解的过程) 3、排序: (1)、冒泡排序:它重复地走访过要排序的数列,一次比较两个元素,如果他们的顺序错误就把他们交换过来。走访数列的工作是重复地进行直到没有再需要交换,也就是说该数列已经排序完成。 这个算法的名字由来是因为越小的元素会经由交换慢慢“浮”到数列的顶端,故名。 (2)、选择排序:每一趟从待排序的数据元素中选出最小(或最大)的一个元素,顺序放在已排好序的数列的最后,直到全部待排序的数据元素排完。选择排序是不稳定的排序方法。 冒泡排序、选择排序都是比较排序。 4、查找: (1)、顺序查找:序列的最头走到最尾,挨个和目标进行比较,如果找到了,就停止遍历,如果走完了,还没找到,那么表示失败了 (2)、对分查找:对分查找是效率很高的查找方法,但被查找的数据必须是有序的。A,首先将查找的数与有序数组内处于中间位置的数据比较,如果中间位置上的数与查找的数不同,根据有序性,就可确定应该在数组的前半部分还是后半部分继续查找。B,在新确定的范围内,继续按上述方法进行查找,直到获得最终结果 六、VB基本数据类型: 竭诚为您提供优质文档/双击可除串的模式匹配算法实验报告 篇一:串的模式匹配算法 串的匹配算法——bruteForce(bF)算法 匹配模式的定义 设有主串s和子串T,子串T的定位就是要在主串s中找到一个与子串T相等的子串。通常把主串s称为目标串,把子串T称为模式串,因此定位也称作模式匹配。模式匹配成功是指在目标串s中找到一个模式串T;不成功则指目标串s中不存在模式串T。bF算法 brute-Force算法简称为bF算法,其基本思路是:从目标串s的第一个字符开始和模式串T中的第一个字符比较,若相等,则继续逐个比较后续的字符;否则从目标串s的第二个字符开始重新与模式串T的第一个字符进行比较。以此类推,若从模式串T的第i个字符开始,每个字符依次和目标串s中的对应字符相等,则匹配成功,该算法返回i;否则,匹配失败,算法返回0。 实现代码如下: /*返回子串T在主串s中第pos个字符之后的位置。若不存在,则函数返回值为0./*T非空。 intindex(strings,stringT,intpos) { inti=pos;//用于主串s中当前位置下标,若pos不为1则从pos位置开始匹配intj=1;//j用于子串T中当前位置下标值while(i j=1; } if(j>T[0]) returni-T[0]; else return0; } } bF算法的时间复杂度 若n为主串长度,m为子串长度则 最好的情况是:一配就中,只比较了m次。 最坏的情况是:主串前面n-m个位置都部分匹配到子串的最后一位,即这n-m位比较了m次,最后m位也各比较了一次,还要加上m,所以总次数为:(n-m)*m+m=(n-m+1)*m从最好到最坏情况统计总的比较次数,然后取平均,得到一般情况是o(n+m). 关于快速高效的模式匹配算法的剖析与改进 摘要:模式匹配算法是现代化网络入侵检测中的关键环节,本文主要介绍了几种常用的模式匹配算法,并在此基础上,提出一种更快捷、更高效的改进方法,以提高模式匹配的效率与质量,确保网络安全。 关键词:模式匹配入侵检测改进 随着我国计算机与网络技术的飞速发展,网络应用已涉及到人们生产、生活的各个领域,其重要性日益凸显。随之而来的网络攻击问题也备受关注,给网络安全性带来挑战。传统的网络防御模式,主要采取身份认证、防火墙、数据加密等技术,但是与当前网络发展不适应。在此背景下,入侵检测技术营运而生,并建立在模式匹配基础上,确保检测的快捷性、准确性,应用越来越广泛。 1、模式匹配原理概述 模式匹配是入侵检测领域的重要概念,源自入侵信号的层次性。结合网络入侵检测的底层审计事件,从中提取更高层次的内容。通过高层事件形成的入侵信号,遵循一定的结构关系,将入侵信号的抽象层次进行具体划分。入侵领域大师kumar将这种入侵信号划分为四大层次,并将每一个层次与匹配模式相对应。以下将分别对四大层次进行分析: (1)存在。只要存在审计事项,就可以证明入侵行为的发生,并深层次挖掘入侵企图。存在主要对应的匹配模式就是“存在模式”。可以说,存在模式就是在固定的时间内,检查系统中的特定状态, 同时判断系统状态。 (2)序列。一些入侵的发生,是遵循一定的顺序,而组成的各种行为。具体表现在一组事件的秩序上。序列对应的是“序列模式”,在应用序列模式检测入侵时,主要关注间隔的时间与持续的时间。 (3)规则。规则表示的是一种可以扩展的表达方式,主要通过and 逻辑表达来连接一系列的描述事件规则。一般适用于这种模式的攻击信号由相关活动组成,这些活动之间往往不存在事件的顺序关系。 (4)其他。其他模式是不包含前面几种方法的攻击,在具体应用过程中,难以与其他入侵信号进行模式匹配,大多为部分实现方式。 2、几种常用的模式匹配算法 2.1 ac算法 ac算法(aho-corasick)是一种可以同时搜索若干个模式的匹配算法,最早时期在图书馆书目查询系统中应用,效果良好。通过使用ac算法,实现了利用有限状态自动机结构对所有字符串的接收过程。自动机具有结构性特征,且每一个前缀都利用唯一状态显示,甚至可同时应用于多个模式的前缀中。如果文本中的某一个字符不属于模式中预期的下一个字符范围内,或者可能出现错误链接的指向状态等,那么最长模式的前缀同时也可作为当前状态相对应的后缀。ac算法的复杂性在于o(n),预处理阶段的复杂性则在于o(m)。在采取ac算法的有限状态自动机中,应该在每一个字符的模式串中分别建立节点,提高该算法的使用效率与质量。目前,应用有限 Dijkstra算法原理详细讲解 如下图,设A为源点,求A到其他各顶点(B、C、D、E、F)的最短路径。线上所标注为相邻线段之间的距离,即权值。(注:此图为随意所画,其相邻顶点间的距离与图中的目视长度不能一一对等) 算法执行步骤如下表: Dijkstra算法的完整实现版本之算法的源代码 样例图: 输入格式: 输出格式: 输入时,将s,t,x,y,z五个点按照1,2,3,4,5起别名,输入格式按照下图例所示当提示Please enter the vertex where Dijkstra algorithm starts:时输入算法的起 始点 比如计算结果v1v4v2表示从点1到点2经过1,4,2为最短路径 Dijkstra算法的完整实现版本,算法的源代码 /* Dijkstra.c Copyright (c) 2002, 2006 by ctu_85 All Rights Reserved. */ #include "stdio.h" #include "malloc.h" #define maxium 32767 #define maxver 9 /*defines the max number of vertexs which the programm can handle*/ #define OK 1 struct Point { char vertex[3]; struct Link *work; struct Point *next; }; struct Link { char vertex[3]; int value; struct Link *next; }; struct Table /*the workbannch of the algorithm*/ { int cost; int Known; char vertex[3]; //算法功能:串的朴素模式匹配是最简单的一种模式匹配算法,又称为 Brute Force 算法,简称为BF算法 #include int main() { SString S, T; int m; char strs1[MAXL]; //建立主串S char strs2[MAXL]; //建立模式串T printf("请输入主串和子串:\n"); printf("主串S: "); scanf("%s", strs1); printf("子串T: "); scanf("%s", strs2); StrAssign(S, strs1); StrAssign(T, strs2); m = Index(S, T, 1); if(m) printf("主串 S = {%s}\n子串 T = {%s}\n在第 %d 个位置开始匹配!\n", strs1, strs2, m); else printf("主串 S = {%s}\n子串 T = {%s}\n匹配不成功!\n", strs1, strs2); return 0; } 数学与统计学院 智能计算及应用课程设计 设计题目:智能计算解决旅行商问题 摘要 本文以遗传算法、模拟退火、蚁群算法三个算法解决旅行商问题,将三个算法进行比较分析。目前这三个算法广泛应用于各个领域中,本文以31个城市为例,运用遗传算法、模拟退火、蚁群算法分别进行了计算,将他们的计算结果进行了比较分析。 关键词:遗传算法模拟退火蚁群算法旅行商问题 背景: 遗传算法: 20世纪60年代初,美国Michigan大学的John Holland教授开始研究自然和人工系统的自适应行为,在从事如何建立能学习的机器的研究过程中,受达尔文进化论的启发,逐渐意识到为获得一个好的算法仅靠单个策略建立和改进是不够的,还要依赖于一个包含许多候选策略的群体的繁殖,从而提出了遗传算法的基本思想。 20世纪60年代中期,基于语言智能和逻辑数学智能的传统人工智能十分兴盛,而基于自然进化思想的模拟进化算法则遭到怀疑与反对,但Holland及其指导的博士仍坚持这一领域的研究。Bagley发表了第一篇有关遗传算法应用的论文,并首先提出“遗传算法”这一术语,在其博士论文中采用双倍体编码,发展了复制、交叉、变异、显性、倒位等基因操作算子,并敏锐地察觉到防止早熟的机理,发展了自组织遗传算法的概念。与此同时,Rosenberg在其博士论文中进行了单细胞生物群体的计算机仿真研究,对以后函数优化颇有启发,并发展了自适应交换策略,在遗传操作方面提出了许多独特的设想。Hollistien在其1971年发表的《计算机控制系统的人工遗传自适应方法》论文中首次将遗传算法应用于函数优化,并对优势基因控制、交叉、变异以及编码技术进行了深入的研究。 人们经过长期的研究,在20世纪}o年代初形成了遗传算法的基本框架。1975年Holland 出版了经典著作“Adaptation in Nature and Artificial System",该书详细阐述了遗传算 Boyer-Moore 经典单模式匹配算法 BM模式匹配算法-原理(图解) 由于毕业设计(入侵检测)的需要,这两天仔细研究了BM模式匹配算法,稍有心得,特此记下。 首先,先简单说明一下有关BM算法的一些基本概念。 BM算法是一种精确字符串匹配算法(区别于模糊匹配)。 BM算法采用从右向左比较的方法,同时应用到了两种启发式规则,即坏字符规则和好后缀规则,来决定向右跳跃的距离。 BM算法的基本流程: 设文本串T,模式串为P。首先将T与P进行左对齐,然后进行从右向左比较,如下图所示: 若是某趟比较不匹配时,BM算法就采用两条启发式规则,即坏字符规则和好后缀规则,来计算模式串向右移动的距离,直到整个匹配过程的结束。 下面,来详细介绍一下坏字符规则和好后缀规则。 首先,诠释一下坏字符和好后缀的概念。 请看下图: 图中,第一个不匹配的字符(红色部分)为坏字符,已匹配部分(绿色)为好后缀。 1)坏字符规则(Bad Character): 在BM算法从右向左扫描的过程中,若发现某个字符x不匹配,则按如下两种情况讨论: i. 如果字符x在模式P中没有出现,那么从字符x开始的m个文本显然不可能与P匹配成功,直接全部跳过该区域即可。 ii. 如果x在模式P中出现且出现次数>=1,则以该字符所在最右边位置进行对齐。 用数学公式表示,设Skip(x)为P右移的距离,m为模式串P的长度,max(x)为字符x在P中最右位置。 可以总结为字符x出现与否,将max(x)=0作为初值即可。 例1: 下图红色部分,发生了一次不匹配。 计算移动距离Skip(c) = m-max(c)=5 - 3 = 2,则P向右移动2位。 移动后如下图: 2)好后缀规则(Good Suffix): 若发现某个字符不匹配的同时,已有部分字符匹配成功,则按如下两种情况讨论: i. 如果在P中位置t处已匹配部分P'在P中的某位置t'也出现,且位置t'的前一个字符与位置t的前一个字符不相同,则将P右移使t'对应t方才的所在的位置。 ii. 如果在P中任何位置已匹配部分P'都没有再出现,则找到与P'的后缀P''相同的P的最长前缀x,向右移动P,使x对应方才P''后缀所在的位置。 一、问题描述 模式匹配两个串。 二、设计思想 这种由D.E.Knuth,J.H.Morris和V.R.Pratt同时发现的改进的模式匹配算法简称为KM P算法。 注意到这是一个改进的算法,所以有必要把原来的模式匹配算法拿出来,其实理解的关键就在这里,一般的匹配算法: int Index(String S,String T,int pos)//参考《数据结构》中的程序 { i=pos;j=1;//这里的串的第1个元素下标是1 while(i<=S.Length && j<=T.Length) { if(S[i]==T[j]){++i;++j;} else{i=i-j+2;j=1;}//**************(1) } if(j>T.Length) return i-T.Length;//匹配成功 else return 0; } 匹配的过程非常清晰,关键是当‘失配’的时候程序是如何处理的?为什么要回溯,看下面的例子: S:aaaaabababcaaa T:ababc aaaaabababcaaa ababc.(.表示前一个已经失配) 回溯的结果就是 aaaaabababcaaa a.(babc) 如果不回溯就是 aaaaabababcaaa aba.bc 这样就漏了一个可能匹配成功的情况 aaaaabababcaaa ababc 这是由T串本身的性质决定的,是因为T串本身有前后'部分匹配'的性质。如果T为a bcdef这样的,大没有回溯的必要。 改进的地方也就是这里,我们从T串本身出发,事先就找准了T自身前后部分匹配的位置,那就可以改进算法。 如果不用回溯,那T串下一个位置从哪里开始呢? 还是上面那个例子,T为ababc,如果c失配,那就可以往前移到aba最后一个a的位置,像这样: ...ababd... ababc ->ababc 这样i不用回溯,j跳到前2个位置,继续匹配的过程,这就是KMP算法所在。这个当T[j]失配后,j应该往前跳的值就是j的next值,它是由T串本身固有决定的,与S串无关。 《数据结构》上给了next值的定义: 0 如果j=1 next[j]={Max{k|1 算法案例 【学习目标】 1.理解辗转相除法与更相减损术中蕴含的数学原理,并能根据这些原理进行算法分析; 2.基本能根据算法语句与程序框图的知识设计完整的程序框图并写出算法程序; 3.了解秦九韶算法的计算过程,并理解利用秦九韶算法可以减少计算次数提高计算效率的实质; 4.了解各种进位制与十进制之间转换的规律,会利用各种进位制与十进制之间的联系进行各种进位制之间的转换. 【要点梳理】 要点一、辗转相除法 也叫欧几里德算法,它是由欧几里德在公元前300年左右首先提出的.利用辗转相除法求最大公约数的步骤如下: 第一步:用较大的数m除以较小的数n得到一个商q0和一个余数r0; 第二步:若r0=0,则n为m,n的最大公约数;若r0≠0,则用除数n除以余数r0得到一个商q1和一个余数r1; 第三步:若r1=0,则r0为m,n的最大公约数;若r1≠0,则用除数r0除以余数r1得到一个商q2和一个余数r2; …… 依次计算直至r n=0,此时所得到的r n-1即为所求的最大公约数. 用辗转相除法求最大公约数的程序框图为: 程序: INPUT “m=”;m INPUT “n=”;n IF m /** *时间:2010年8月26日7:09:57 *功能:模式匹配算法代码 */ #include"stdio.h" #include"malloc.h" void kmp(int *ikmp,char *t,int t_length) { int k=0; int q=0; ikmp[0]=k; for(q=1;q while(t[t_length]!='\0') { t_length++; } /*测试*/ printf("t_length is %d\n",t_length); /*求t的kmp值*/ ikmp=malloc(t_length*sizeof(int)); kmp(ikmp,t,t_length); /*匹配过程*/ for(q=0;q蚁群算法相关概念
智能车PID 算法实现原理讲解
实验三____串的模式匹配
模式匹配KMP算法实验报告
算法理论详细讲解
串的模式匹配算法实验报告
关于快速高效的模式匹配算法的剖析与改进
Dijkstra算法原理详细讲解
串的朴素模式匹配算法(BF算法)
遗传-模拟退火-蚁群三个算法求解TSP的对比讲解
BM模式匹配算法图解
模式匹配KMP算法实验步骤
知识讲解_算法案例_基础
模式匹配算法
相关主题
文本预览