
The S en sitivity Study of an Angular Vibratory
Microme chanical Gyro s cope Driven by the Inner Frame
F A NY u e-m i n g1,2,M A O Pan-s o n g2
1.D e pa rt m e nt o f In fo r matio n e n g in e er in g,N an jin g U n i v er s it y of Po st s an d T e le c o m m u n ic atio n,N an jin g210003,C h ina
2.D e pa rt m e nt o f E le ctr o n ic e n gi n e e r in g,S o u th e ast U ni v e r sit y,N an ji n g210096,C h in a
()
Ab stra ct: T hi s pa pe r de v el o p s d y na m ic a n d s en sit i ve eq u ati o n s o f a n g ula r v i br at or y m ic r o m e ch an ic al g yr o s c o p e w ith d u-al-g i m b al dri v en b y t he i n ne r g i m bal f r a m e,a n d pr ese nt s t w o s i m p le an d f ea si ble m et h o d s t o e n ha nc e t he g yr o sc o pe’s sen s iti v it y.T he f re q ue nc y o f t he i n ne r g i m bal f ra m e an d th e nat ur al f r eq u en c y o f th e o ute r g i m bal f ra m e a re e q ual.T h e dri v en si g n al co n si sts o f t w o s in e-w a v es an d th eir fr e q ue ncies a r e s ele cted t o eq u al t o th e nat ur al f re q ue nc y o f in n e r an d o ute r f r a m e.in de si g ni n g g yr o s co pe s y ste m.
Ke y w ord s: 7630m icr o m e ch an ic al g y ro sc o p e;d o u b le g i m b als;se n siti v it y
EEACC:
内框驱动式硅微型角振动陀螺仪灵敏度研究①
方玉明1、2,茅盘松2
1.南京邮电学院信息工程系,南京210003;
2.东南大学电子工程系,南京210096.
()
摘要:建立了内框驱动式硅微型角振动陀螺仪的运动方程,导出了灵敏度方程,提出了提高陀螺系统灵敏度的简单可行的方法,即:设计制造陀螺仪时,使内外框架固有频率相等,或驱动信号采用二个正弦波之和,二个正弦波的频率应选为框架的固有频率。
关键词:微机械陀螺仪;双框架;灵敏度
中图分类号:1?249.122文献标识码:A文章编号:1005-9490(2004)01-
众所周知,微陀螺仪技术对国防建设和国民经济建设具有极其重要的意义。它广阔的应用前景使得这方面的课题成为热门的跨世纪的研究领域之一。硅微型双框架式角振动陀螺仪首先由美国C S-D L实验室1988年研制成功。它有两个框架,一为驱动,一为检测。按驱动框是内框还是外框,可分为内框驱动式和外框驱动式。对于内框驱动,施加于内框架的驱动力矩可以被挠性杆隔离,不会引起外框架振动,从而可以提高信噪比。故本文按内框驱动式,建立了硅微型角振动陀螺仪的运动方程,导出了灵敏度方程,提出了提高陀螺系统灵敏度的简单可行的方法,即:设计制造陀螺仪时,使内外框架固有频率相等,或驱动信号采用二个正弦波之和,二个正弦波的频率应分别选为内、外框架的固有频率。
1内框驱动式硅微型角振动陀螺仪的结构组成及工作原理[1]
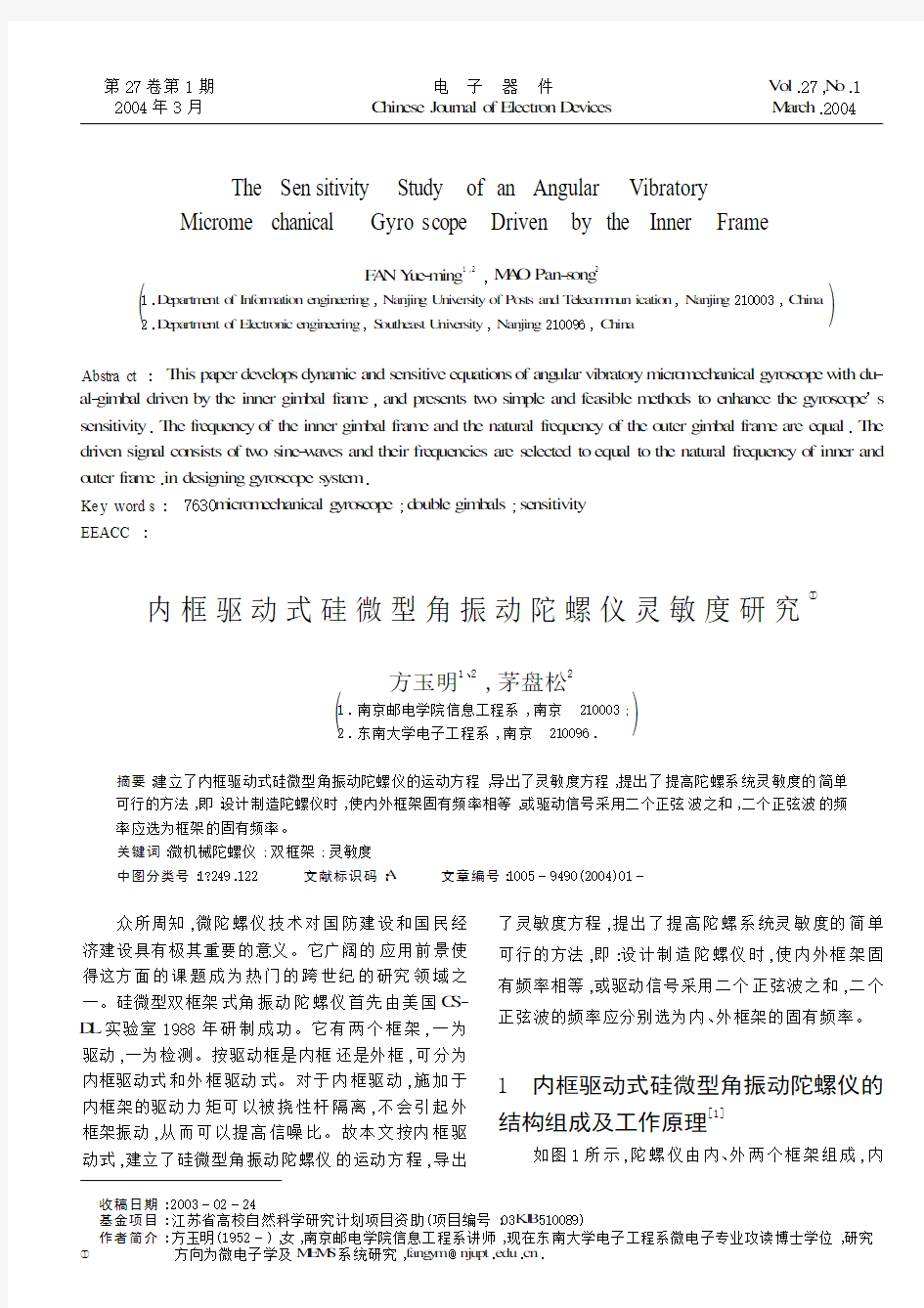
如图1所示,陀螺仪由内、外两个框架组成,内
第27卷第1期2004年3月
电子器件
C h in ese J o urn al o f E le ctr o n
D e v ic es
V o l.27,N o.1
M a r ch.2004
①收稿日期:2003-02-24
基金项目:江苏省高校自然科学研究计划项目资助(项目编号:03K J B510089)
作者简介:方玉明(1952-),女,南京邮电学院信息工程系讲师,现在东南大学电子工程系微电子专业攻读博士学位,研究方向为微电子学及M E M S系统研究,f an g y m@nj u p t.ed https://www.doczj.com/doc/7c15017718.html,.
图1 框架式角振动陀螺仪
框架通过一对内挠性轴连接到外框架上,外框架再通过一对外挠性轴连接到桥墩上,内、外挠性轴是相互垂直的,且都成扁平结构,这样使得它们的扭转刚度都很低,而其余方向的刚度都很高。内框架上有一个质量块,用来作为陀螺的敏感元件。内框架下面有一对电极,它与内框架形成一对驱动电容,外框架的另两边下也有一对电极,与外框架形成敏感电容。双框架式角振动陀螺仪采用静电驱动、电容感测的工作方式:在内框架下的两个驱动电极上加以大小相等的直流偏置电压,使内板块带有一定的电荷,然后再加以两个大小相等,频率相等,相位相反的交流电压,使电极与框架间产生静电吸力或斥力。由于所加电压是随时间变化的,因此静电力的大小与方向也是随时间变化的。如此交替变换造成内框架绕内挠性轴振动。这时若沿Z 轴有角速度输入,由于哥氏效应产生的哥氏力将会引起质量块牵动内、外板块绕外挠性轴做角振动,这就使得敏感电容值发生变化,形成2△C ,而输入角速度的大小与极板的偏移大小有关,因此由2△C 就可依一定的关系式测出角速度的大小。
2 陀螺系统运动方程的建立
设坐标系X Y Z 是固定坐标系,整个系统振幅微小,坐标系的建立如图1,并假设陀螺壳体仅有绕固
定系Z 轴方向以角速度Ωz ·Z
旋转。内框架在驱动电极的作用下绕内挠性轴的振动振动角位移、角速
度分别为:θ
1x =θ1x ·X
、θ
1x =
θ1x ·X
,其运动方程为:I 1x ¨θ1x +D 1 θ1x +K 1x θ1x =M 外
(1)
其中,D 1为内框架的阻尼系数,K 1x 为内挠性轴绕固定系X 轴的扭转弹性系数。M 外为外部加在内框架
的静电驱动力矩,一般为
[2]
:M 外=k d V de V a s
in (ω·t ),V de 是直流偏置电压,V a si n (ω·t )是加在驱动电极上的交变电压,k d =εA d (2l d +w d )h 2
d
,ε是真空介电常数ε=8.85×10
-12
N
V
2(
)
,A d 是驱动电容极板的面积,l d
是驱动轴到电容极板的距离,w d 是驱动电容极板的宽度,h d 为内框架与极板平行时的距离。
现在内框架组合件上任取一微元P (dx dy dz ),设它在固定参考系中的坐标为(x ,y ,z ),其质量为
ρdx dy dz ,其中,ρ为材料的密度。则其相对固定系的振动线速度为:
v
p (x ,y ,z )=v x ·X
+v y ·Y
+v z ·Z
= θ1x ×(x ·X
+y ·Y
+z ·Z
)=- θ1x z ·Y
+ θ1x y ·Z
(2)
则微元P 将产生哥氏加速度,其大小为:
a
p =2Ωz ·Z
×v
p (x ,y ,z )=2Ωz θ1x z ·X
(3)则作用在微元P 上的哥氏惯性力应为:
d F
=-a
p ρdx dy dz ·X
=-2Ωz θ1x z
ρdx dy dz ·X
(4)
则由于哥氏惯性力的作用,在内框架上形成的绕外挠性轴的哥氏惯性力矩为:
d M =d F
×z ·Z
=2Ωz θ1x z 2
ρdx dy dz ·Y
(5)那么,由整个内框架元件产生的作用于外框架上的总哥氏惯性力矩为:M G =
V
2Ωz
θ1x
z 2
ρdx dy dz ·Y
=Ωz θ1x
V
2z 2
ρdx dy dz ·Y
=Ωz θ1x
V
[(y 2+z 2)+(z 2+x 2)-(x 2+y 2
)]ρd xd ydz ·Y
=Ωz θ1x (I 1x +I 1y -I 1z )=I 1Ωz θ1x ·Y
(6)
式中,I 1=I 1x +I 1y -I 1z 为内框架组合件的转动惯量。可见,总哥氏惯性力矩M G 与输入的角速度Ωz 和内框架角速度成正比。在哥氏惯性力矩的作用下,外框架绕Y 轴的运动方程为:
I 2y ¨θ2y +D 2 θ2y +K 2y θ2y =I 1Ωz θ1x
(7)
式中,θ2y 是外框架绕Y 轴的角位移。方程(6)和(7)就是该种陀螺仪的数学模型。
2 电子器件 第27卷
3 灵敏度方程
设输入角速度Ωz 为常值,对方程(6)、(7)做L ap lac e 变换,可以得到θ2y 对输入角速度Ωz 的响应:
θ2y (s )=
I 1s θ1x (s
)I 2y (s 2
+2ξ2ω2s +ω22)
Ωz
=
I 1I 2y (s 2
+2ξ2ω2s +ω22)·s M 外(s )·Ωz
I 1x (s 2+2ξ1ω1s +ω2
1)
(8)
式中,ω2=K 2y
I 2y
为外框架无阻尼时的固有频率,ξ2
=
D 2
2I 2y ω2
为外框架无阻尼时的阻尼比,ω1=K 1y
I 1y
为内框架的固有频率,ξ1=
D 1
2I 1y ω1
为内框架的阻尼比。显然,根据方程(7)可得到关于提高系统灵敏度的如下结论:
① 弱阻尼情况下,如果驱动电压取为V a [si n (ω1·t )+si n (ω2·t )],则静电驱动力矩M 外(s )的频率成份将由ω1和ω2组成时,即:M 外=k d V de V a [si n (ω1·t )+s in (ω2·t )]。此时,内、外框架将同时发生共振,系统对待测角速度Ωz 将具有最大灵敏度。而以往的驱动电压
[2]
只有一个频率成份ω1,
只能使内框架发生共振。这时的灵敏度不是最大的,这种驱动方式没有将系统的性能充分发挥出来,显然不是
最佳驱动方式。
② 如果设计制造陀螺仪时,使内、外框架固有频率相等,驱动信号只要有一个频率成份ω1即可使内、外框架同时发生共振,这时系统对待测角速度Ωz 具有最大灵敏度。
4 结 论
基于现代理论力学原理,本文建立了内框驱动式硅微型角振动陀螺仪的运动方程,导出了灵敏度方程,提出了不同于以往的驱动方式的提高陀螺系统灵敏度的简单可行的方法,即:设计制造陀螺仪时,使内外框架固有频率相等,或驱动信号采用二个正弦波之和,二个正弦波的频率应选为内、外框架的固有频率。参考文献:
[1] 王寿荣.硅微型惯性器件理论及应用[M ].东南大学出
版社,2000.
[2] 蔡体菁.微型双框架式角振动陀螺仪的原理及结构误
差分析[J ].东南大学学报,
1999,29:130-133.[3] 茅盘松,方玉明.平面振动式硅微型加速计的研制[J ].
传感技术学报,1997,4.
[4] 茅盘松,王修伦.硅微振动陀螺的理论分析[J ].传感器
技术,1995,6.
[5] 方玉明.一种新型双框架式角振动陀螺仪的研制[D ].
硕士学位论文,1999.4.
3
第1期 方玉明,茅盘松:内框驱动式硅微型角振动陀螺仪灵敏度研究
第29卷第6期1999年11月 东 南 大 学 学 报JOURNAL OF SOUTHEAST UNIVERSITY Vol 29No 6Nov.1999 收稿日期:1999-03-16. 第一作者:男,1967年生,讲师. 硅微型两自由度振动轮式陀螺仪原理分析 苏 岩 王寿荣 周百令 (东南大学仪器科学与工程系,南京210096) 摘 要 首次提出了2种两自由度振动轮式陀螺仪新结构.详细分析了陀螺仪工作原理,推导了陀螺仪动力学方程.介绍了电容信号器和力矩器的工作原理. 关键词 振动轮式陀螺仪;梳状谐振器;电容信号器 分类号 U666 123 国内外硅微型陀螺仪的研究方兴未艾.各种新的设想、新的结构、新的工艺层出不穷.目前,国内各研究单位所研究的微机械陀螺仪为单自由度陀螺仪.因此,研制、开发两自由度微机械陀螺仪是一项有意义的探索性工作. 本文提出了2种新的陀螺仪结构,这2种结构均可以实现两自由度输入敏感[1].由于环式陀螺仪的外环可以做的较大,因而动量矩较以往的陀螺仪为大,精度将得到很大提高.1 两自由度振动轮式陀螺仪的结构 双环振动轮式陀螺仪的结构如图1所示.该陀螺仪由上下两层构成.下层为引线和电容极板层,该层与仪表壳体相固连;上层为陀螺仪主体结构.陀螺仪外环通过一对挠性轴和内环相连;内环通过两对辐条和一对挠性轴与固定支架相连.外环与底板上的镀金层分别构成两对电容.这两对电容构成信号器和力矩器.用于敏感x 、y 轴的输入角速度和平衡输入力矩.内环设计成梳状谐振器,整个环等分成4部分,分别构成4个谐振器.各谐振器产生的静电力矩用于驱动内、外环绕回转轴振动.内环通过一对外挠性轴带动外环振动. 三环振动轮式陀螺仪的结构如图2所示.该陀螺仪亦由上下两层构成.下层为引线和电容极板层,该层与仪表壳体相固连;上层为陀螺仪主体结构.陀螺仪由3个圆环通过挠性轴相连.外环通过一对扁平状挠性轴与中环相连;中环通过另一对与外环挠性轴相垂直的扁平状挠性轴和内环相连;内环通过十字型挠性轴与圆柱形固定支架相连.外、中环可以分别绕各自的挠性轴扭转.同时,外、中环与底板上的镀金层分别形成两对电容.这两对电容构成信号器和力矩器.用于敏感x 、y 轴的输入角速度和平衡输入力矩.内环设计成梳状谐振器,整个内环等分成4部分,分别构成4个谐振器.各谐振器产生的静电力矩用于驱动内、中、外环振动.内环通过两对挠性轴带动中环和外环振动. 图3所示的陀螺仪结构为图2所示陀螺仪结构的另一种变型.其主要区别在于,图2所示陀螺仪的谐振器的固定叉指为外结构.中环与内环之间挠性轴的长度较长,结构设计时的难度
振动信号的分析方法 在对设备进行监测和故障诊断中,大多都采用对设备进行振动状态监测,所以对振动信号进行有效地分析,使用不同的分析方法来获得振动信号的特性参数,这种方法是机械设备实现故障诊断的主要措施。常用的振动信号分析方法有时域分析法,频域分析法,阶次跟踪分析法,经验模态分析法和包络解调分析法,下面逐个对这五种分析方法进行详细说明。 1时域分析法 振动时域参数分析是对风力发电机组进行故障检测和诊断的简易方法,时域波形是经过DSP数据处理器去噪处理后的信号,包含较多的信息量。在时域诊断中,采用的参数有:均值、均方根值、峭度值、峰值、脉冲因子、裕度系数……通过监测这些特征参数是否超过设定的_值来诊断传动部件是否发生机械故障。幅域参数一般分为有量纲和无量纲2种类型的指标。均值、均方根值等为有量纲的时域参数。无量纲的时域参数包含偏态系数、波形因子、峰态系数、脉冲因子、裕度系数……现对时域分析中所涉及的主要釆用的参数进行简要介绍。 (1)均值:平均值又可称为直流分量,是用来评价信号是否稳定。表征了振 动信号变化的中心波动,是信号的常量分量,其表达式为 其中,n为总的采样点数;表示振动信号的样本函数。 (2)均方根值:均方根值,也叫方均根值,它是对信号先平方,再求取平均值后开方得到的,是对没有规律的信号比较有用。其表达式为 (3)峭度:峭度值是可以直接体现概率密度的一种可靠参数,概率密度函数分布形态偏移越大,峭度值的绝对值就越大。 峭度值可以反映概率密度图形的对称性。概率密度函数分布形态偏移越大,
峭度值的绝对值越大。 除此之外,还有几种比较常见的时域参数, 2频域分析法 时域振动信号的频谱分析是目前所知的研究故障特征方法中基础的方法之一,可以在频谱中,获得比较全面的故障信息。在频域中,主要从幅值频谱、功率频谱、倒频谱3个基本的频谱进行分析。频谱的功能是用来分析原始信号中轴承内圈、外圈的固有频率和故障频率,以及齿轮箱齿轮互相哨合产生的哨合频率;倒频谱的功能是用于容易地获得频谱的边频带中的周期成分,并确定故障发生的位置。 1.幅值谱分析 幅值频谱就是对传感器釆样所得的原始信号经处理后的振动信号进行一次傅立叶变换(FFT),计算并画出该时域振动信号的频率图谱,傅立叶变化的表达式为:
The S en sitivity Study of an Angular Vibratory Microme chanical Gyro s cope Driven by the Inner Frame F A NY u e-m i n g1,2,M A O Pan-s o n g2 1.D e pa rt m e nt o f In fo r matio n e n g in e er in g,N an jin g U n i v er s it y of Po st s an d T e le c o m m u n ic atio n,N an jin g210003,C h ina 2.D e pa rt m e nt o f E le ctr o n ic e n gi n e e r in g,S o u th e ast U ni v e r sit y,N an ji n g210096,C h in a () Ab stra ct: T hi s pa pe r de v el o p s d y na m ic a n d s en sit i ve eq u ati o n s o f a n g ula r v i br at or y m ic r o m e ch an ic al g yr o s c o p e w ith d u-al-g i m b al dri v en b y t he i n ne r g i m bal f r a m e,a n d pr ese nt s t w o s i m p le an d f ea si ble m et h o d s t o e n ha nc e t he g yr o sc o pe’s sen s iti v it y.T he f re q ue nc y o f t he i n ne r g i m bal f ra m e an d th e nat ur al f r eq u en c y o f th e o ute r g i m bal f ra m e a re e q ual.T h e dri v en si g n al co n si sts o f t w o s in e-w a v es an d th eir fr e q ue ncies a r e s ele cted t o eq u al t o th e nat ur al f re q ue nc y o f in n e r an d o ute r f r a m e.in de si g ni n g g yr o s co pe s y ste m. Ke y w ord s: 7630m icr o m e ch an ic al g y ro sc o p e;d o u b le g i m b als;se n siti v it y EEACC: 内框驱动式硅微型角振动陀螺仪灵敏度研究① 方玉明1、2,茅盘松2 1.南京邮电学院信息工程系,南京210003; 2.东南大学电子工程系,南京210096. () 摘要:建立了内框驱动式硅微型角振动陀螺仪的运动方程,导出了灵敏度方程,提出了提高陀螺系统灵敏度的简单可行的方法,即:设计制造陀螺仪时,使内外框架固有频率相等,或驱动信号采用二个正弦波之和,二个正弦波的频率应选为框架的固有频率。 关键词:微机械陀螺仪;双框架;灵敏度 中图分类号:1?249.122文献标识码:A文章编号:1005-9490(2004)01- 众所周知,微陀螺仪技术对国防建设和国民经济建设具有极其重要的意义。它广阔的应用前景使得这方面的课题成为热门的跨世纪的研究领域之一。硅微型双框架式角振动陀螺仪首先由美国C S-D L实验室1988年研制成功。它有两个框架,一为驱动,一为检测。按驱动框是内框还是外框,可分为内框驱动式和外框驱动式。对于内框驱动,施加于内框架的驱动力矩可以被挠性杆隔离,不会引起外框架振动,从而可以提高信噪比。故本文按内框驱动式,建立了硅微型角振动陀螺仪的运动方程,导出了灵敏度方程,提出了提高陀螺系统灵敏度的简单可行的方法,即:设计制造陀螺仪时,使内外框架固有频率相等,或驱动信号采用二个正弦波之和,二个正弦波的频率应分别选为内、外框架的固有频率。 1内框驱动式硅微型角振动陀螺仪的结构组成及工作原理[1] 如图1所示,陀螺仪由内、外两个框架组成,内 第27卷第1期2004年3月 电子器件 C h in ese J o urn al o f E le ctr o n D e v ic es V o l.27,N o.1 M a r ch.2004 ①收稿日期:2003-02-24 基金项目:江苏省高校自然科学研究计划项目资助(项目编号:03K J B510089) 作者简介:方玉明(1952-),女,南京邮电学院信息工程系讲师,现在东南大学电子工程系微电子专业攻读博士学位,研究方向为微电子学及M E M S系统研究,f an g y m@nj u p t.ed https://www.doczj.com/doc/7c15017718.html,.
MATLAB在机械振动信号中的应用 申振 (山东理工大学交通与车辆工程学院) 摘要:综述了现代信号分析处理理论、方法如时域分析(包括时域参数识别、相关分析等)、频域分析(包括傅立叶变换、功率谱分解等),并结合MATLAB中的相关函数来对所拟合的振动信号进行时域分析和频域分析,并对绘出的频谱图进行说明。 关键词:时域分析频域分析 MATLAB 信号是信息的载体,采用合适的信号分析处理方法以获取隐藏于传感观测信号中的重要信息(包括时域与频域信息等),对于许多工程应用领域均具有重要意义。对获取振动噪声信号的分析处理,是进行状态监测、故障诊断、质量检查、源识别、机器产品的动态性能测试与优化设计等工作的重要环节,它可以预先发现机械部件的磨损和缺陷等故障,从而可以提高产品的质量,降低维护费用。随着测试技术的迅速发展,各种信号分析方法也随之涌现,并广泛应用在各个领域[1]。 时域描述简单直观,只能反映信号的幅值随时间的变化,而不能明确的揭示信号随时间的变化关系。为了研究信号的频率组成和各频率成分的幅值大小、相位关系,应对信号进行频谱分析,即把时域信号通过适当的数学方法处理变成频率f(或角频率 )为独立变量,相应的幅值或相位为因变量的频域描述。频域分析法将时域分析法中的微分或差分方程转换为代数方程,有利于问题的分析[2]。 MATLAB是MathWorks公司于1982年推出的一种功能强大、效率高、交互性好的数值计算和可视化计算机高级语言,它将数值分析、矩阵运算、信号处理和图形显示有机地融合为一体,形成了一个极其方便、用户界面良好的操作环境。随着其自身版本的不断提高,MATLAB的功能越来越强大,应用范围也越来越广,如广泛应用于信号处理、数字图像处理、仿真、自动化控制、小波分析及神经网络等领域[3]。 本文主要运用了MATLAB R2014a对机械振动信号进行分析。分析过程包括时域分析和频域分析两大部分,时域分析的指标包括随机信号的均值、方差以及均方值。频域分析的性能指标包括对功率谱分析、倒频谱分析。在进行上述分析之前先要对振动信号进
mems陀螺仪 mems陀螺仪即硅微机电陀螺仪,绝大多数的MEMS陀螺仪依赖于相互正交的振动和转动引起的交变科里奥利力。MEMS (Micro-Electro-Mechanical Systems)是指集机械元素、微型传感器、微型执行器以及信号处理和控制电路、接口电路、通信和电源于一体的完整微型机电系统。 目录 ?mems陀螺仪的原理 ?mems陀螺仪的特点 ?mems陀螺仪的构成 ?mems陀螺仪的选用 ?mems陀螺仪的安装 mems陀螺仪的原理 ?MEMS 陀螺仪(gyroscope)的工作原理传统的陀螺仪主要是利用角动量守恒原理, 因此它主要是一个不停转动的物体, 它的转轴指向不随承载它的支架的旋转而变化. 但是MEMS 陀螺仪(gyroscope)的工作原理不是这样的,因为要用微机械技术在硅片衬底上加工出一个可转动的结构可不是一件容易的事.MEMS 陀螺仪利用科里奥利力——旋转物体在有径向运动时所受到的切向力. 下面是导出科里奥利力的方法. 有力学知识的读者应该不难理解. 在空间设立动态坐标系(图一).用以下方程计算加速度可以得到三项,分别来自径向加速,科里奥利加速度和向心加速度. 如果物体在圆盘上没有径向运动,科里奥利力就不会产生.因此,在MEMS 陀螺仪的设计上,这个物体被驱动,不停地来回做径向运动或者震荡,与此对应的科里奥利力就是不停地在横向来回变化,并有可能使物体在横向作微小震荡,相位正好与驱动力差90 度.
MEMS 陀螺仪通常有两个方向的可移动电容板.径向的电容板加震荡电压迫使物体作径向运动(有点象加速度计中的自测试模式) ,横向的电容板测量由于横向科里奥利运动带来的电容变化(就象加速度计测量加速度) .因为科里奥利力正比于角速度,所以由电容的变化可以计算出角速度. mems陀螺仪的特点 ?MEMS陀螺仪是利用coriolis 定理,将旋转物体的角速度转换成与角速度成正比的直流电压信号,其核心部件通过掺杂技术、光刻技术、腐蚀技术、LIGA技术、封装技术等批量生产的,它主要特点是 1. 体积小、重量轻,其边长都小于1mm,器件核心的重量仅为1.2mg。 2. 成本低 3. 可靠性好,工作寿命超过10 万小时,能承受1000g 的冲击。 4. 测量范围大,目前我公司生产的MEMS 陀螺仪测量范围可扩展到7560?/s。 mems陀螺仪的构成 ?MEMS 陀螺仪(gyroscope)的设计和工作原理可能各种各样,但是公开的MEMS 陀螺仪均采用振动物体传感角速度的概念. 利用振动来诱导和探测科里奥利力而设计的 MEMS 陀螺仪没有旋转部件, 不需要轴承, 已被证明可以用微机械加工技术大批量生产. 绝大多数MEMS 陀螺仪依赖于由相互正交的振动和转动引起的交变科里奥利力. 振动物体被柔软的弹性结构悬挂在基底之上. 整体动力学系统是二维弹性阻尼系统, 在这个系统中振动和转动诱导的科里奥利力把正比于角速度的能量转移到传感模式. 通过改进设计和静电调试使得驱动和传感的共振频率一致, 以实现最大可能的能量转移, 从而获得最大灵敏度.大多数MEMS 陀螺仪驱动和传感模式完全匹配或接近匹配,它对系统的振动参数变化极其敏感, 而这些系统参数会改变振动的固有频率, 因此需要一个好的控制架构来做修正.如果需要高的品质因子(Q) ,驱动和感应的频宽必须很窄.增加1%的频宽可能降低20%的信号输出.还有阻尼大小也会影响信号输出. 一般的MEMS 陀螺仪由梳子结构的驱动部分和电容板形状的传感部分组成. 有的设计还带有去驱动和传感耦合的结构. mems陀螺仪的选用 ?陀螺仪在选用时,必须注意被测参数的物理环境和必要的性能指标。具体要求分列如下: 1.性能要求 ⑴ .随机漂移、随机游走系数、输出噪声 不同结构形式、不同原理的陀螺仪的对漂移率定义和要求不同,机械式陀螺仪精度使用的是随机漂移,光纤陀螺仪使用的随机游走系数。 随机漂移——指由随机的或不确定的有害力矩引起的漂移率。 随机游走系数——由白噪声产生的随时间累计的陀螺仪输出误差系数。 单位: ?/h1/2、?/s1/2。 输出噪声的单位:?/h/Hz1/2、?/s /Hz1/2 。
硅微型梳状线振动驱动式陀螺仪 硅微型振动陀螺仪在工作时,用微幅振动代替高速旋转 硅微型梳状线振动驱动式陀螺仪的工作原理: 结构图如图所示: 机械部分由基座,提供驱动力的定齿,动齿,活动质量和连接活动质量的弹簧,固定弹簧的固定端组成。固定端和定齿都固定在基座上,活动质量由弹簧连接在固定端上。动齿固定在活动质量上。该陀螺仪采用静电驱动技术,给固定在基座上的定齿梳状电极上加载带直流偏执的交流电压,活动质量上的动齿接地。这样动、静齿间便产生大小和方向周期性变化的静电吸引力,使整个活动质量和动齿一起在两定齿之间来回振动,此时若基座在惯性空间中作转动,由于哥氏力的作用,活动质量将在垂直于基座的方向上振动,这样就可敏感基座相对于惯性空间转动的角速度。 建坐标系:取将动作标系固连在硅微型梳状线振动驱动式陀螺仪的基座上,取动作标系的原点为活动质量质心的平衡位置,x轴为静电驱动力的方向,z轴为与基座垂直的方向,y轴由右手规则确定。 (1)只做x轴方向的转动时的结论: 1.该方向上的角速度不能测量; 2.随着静电引力的振动频率的增大,活动质量的振动的振幅会大大减小,该陀螺仪的灵敏度会降低。 3.x轴方向的角速度不能大于根号内K/m,否则陀螺仪将被损坏。陀螺仪损坏的临界值随尺寸的降低而迅速增加。 (2)只做z轴方向的转动时的结论:不能测量该方向上的角速度。 (3)陀螺仪的基座在y轴方向的转动角速度近似地与活动质量在z轴方向的这一振动频率为ω的振动的振幅成正比。比例系数为2δ/(mω3) 小结:该陀螺仪对y轴方向的角速度最敏感,即应当它作为输入量,把y轴作为输入轴。而对其影响最强烈的是活动质量在z轴方向频率为ω的振动的振幅,它可以作为输出量。而静
第14卷第6期中国惯性技术学报V ol.14No.6 2006年12月 Journal of Chinese Inertial Technology Dec. 2006 文章编号:1005-6734(2006)06-0060-03 硅微机械谐振陀螺仪的非线性分析 盛平,王寿荣,吉训生,许宜申 (东南大学 仪器科学与工程系,南京 210096) 摘要:给出了硅微机械谐振陀螺仪的结构,介绍了硅微机械谐振陀螺仪的工作原理,详细推导并给出了陀螺仪的输出频率和标度因数非线性的计算公式;基于影响谐振陀螺仪标度因数的参数,分析了由谐振器的振幅和 梳齿静电驱动力引起的硅微机械谐振陀螺仪的非线性特性,给出了振动幅度与谐振频率关系的表达式。实验结果表明,陀螺仪的整体性能主要取决于谐振器振动幅度的稳定性。 关键词:陀螺;谐振频率;非线性;双端音叉谐振器 中图分类号:U666.1 文献标识码:A Nonlinear analysis on silicon micromachined resonant gyroscope SHENG Ping, WANG Shou-rong, JI Xun-sheng, XU Yi-shen (Department of Instrument Science and Engineering, Southeast University, Nanjing 210096, China ) Abstract: The operating principle of a silicon micro-machined resonant gyroscope was introduced and its structure was given. The output frequency of the gyroscope and the calculation expressions of scale factor nonlinearity were deduced. Based on the parameters that may influence the scale factor of the resonant gyroscope, the nonlinearity characteristic, which was caused by the resonator amplitude and electrostatic comb-finger driving-force, was analyzed. Finally, the relationship between the resonance frequency and vibration amplitude was presented. The results indicated that the performance of the silicon micromachined resonant gyroscope was determined by the stabilization of the vibration amplitude of resonator. Key words: gyroscope; resonance frequency; nonlinearity; double-ended tuning fork resonator(DETF) 0 引 言 谐振传感器输出的频率信号稳定性好,不易受噪声干扰,在传输和处理过程中也不易出现误差。近年来,基于谐振原理,利用表面微机械加工技术和体硅微机械加工技术研制的谐振器件已有报道,但关于硅微机械谐振陀螺仪的鲜有报 道。当硅微机械谐振陀螺仪具有较高的Q值时,陀螺仪非线性将导致谐振频率 点的漂移。因此,研究硅微机械谐振陀螺仪非线性特性,对提高陀螺仪的性能 很有必要[1]。 1 硅微机械谐振陀螺仪工作原理 硅微机械谐振陀螺仪的结构示意图如图1所示,主要由三部分构成:陀 螺仪敏感质量块部分、杠杆传递部分、双端音叉谐振器(DETF)部分。其中, 陀螺仪敏感质量块部分用于敏感输入角速度,杠杆传递部分用来放大哥氏(Coriolis)力,谐振器部分主要是将陀螺质量块输出给它的轴向哥氏力转化 成相应的频率输出[2]。 基金项目:国家863资助项目(编号:2002AA812038) 收稿日期:2006-08-19;修回日期:2006-09-26 作者简介:盛平(1977—),男,博士研究生,研究方向为微型仪表及微系统技术。电子邮箱:pshengcn@https://www.doczj.com/doc/7c15017718.html, 梳齿质量块 锚驱动方向 杠杆
基于LabVIEW的机械振动信号分析系统的开发 随着现代化工业大生产的不断发展,机械设备的结构变得越来越复杂,并且经常运行于高速、重载以及恶劣环境等条件下。由于各种因素的干扰和影响,会导致机械设备发生故障,轻则降低生产质量或导致停产,重则会造成严重的甚至是灾难性的事故。为此,为尽最大可能地避免事故的发生,机械设备状态监测与故障诊断技术近年来得到了极为广泛的重视,其应用所达到的深入程度十分令人鼓舞。目前,机械设备状态监测与故障诊断已经基本上形成了一门既有理论基础、又有实际应用背景的交叉性学科。 在实际应用中,故障与征兆之间往往并不存在简单的一一对应关系,一种故障可能对应着多种征兆,反之一种征兆也可能是由于多种故障所致。因此,通常必须要借助信号处理等手段从采集的原始数据中加工出特征信息,提取特征量,从而保证有效、准确地进行故障诊断,也就是说,信号处理与故障诊断有着极为密切的联系,信号特征提取是故障诊断中必不可少的一个重要环节[1]。 故障诊断技术的各种理论研究和方法探讨最终都必须落实到具体诊断装置的研制上。而传统的测控仪器以硬件为关键,其开发与维护的费用高、技术更新周期长、价格高、仪器功能柔性差、不易与其他设备连接等特点,越来越不能满足科技进步的要求。虚拟仪器的出现改变了这样的局面,它充分利用了计算机技术来实现和扩展传统测试系统与仪器的功能。 NI公司的图形化编程语言LabVIEW成为当今虚拟仪器开发最流行的一种语言。LabVIEW 的最大特点是用图标代码来代替编程语言创建应用程序。LabVIEW有丰富的函数、工具包、软件包、数值分析、信号处理、设备驱动等功能,还有应用于专业领域的专业模块,解决了传统的虚拟仪器系统采用C、C++、汇编等语言存在的编程、调试过程繁琐、开发周期长、对编程人员要求高等问题,广泛地应用于航空、航天、电子、机械等众多领域[2,3]。 本文基于LabVIEW开发一个针对旋转机械故障诊断的振动信号分析系统,并在成都飞机设计研究所某航空设备监控上获得了应用。 系统设计 根据信号分析系统的设计原则,又考虑到LabVIEW具有图形化编程特点以及丰富的工具箱。因此,笔者选用NI公司的Lab VIEW 7.1作为信号分析系统的开发平台。 笔者开发的信号分析系统主要分为三大模块,即文件管理模块(文件的读取及存储)、信号分析模块、显示模块。按照图1所示的使用流程对这三个模块进行设计。
旋转机械振动与故障诊断研究综述 1.前言 工业生产离不开回转机械,随着装置规模不断扩大,越来越多的高速回转机械应用于工业生产,诸如高速离心压缩机、汽轮机发电机组。动态失稳造成的重大恶性事故屡见不鲜。急剧上升的振动可在几十秒之内造成机组解体,甚至祸及厂房,造成巨大的经济损失和人员伤亡。此外,机械振动可能降低设备机械性能,加速机械零部件的磨损,发出的噪声损害操作者的健康。但是振动也能合理运用,如工业上常用的振动筛、振动破碎等都是振动的有效利用。工程技术人员必须认真对待机械振动问题,当机组产生有害的振动时,及时分析原因,坚持用合理的振动测试标准,采取科学的防治措施。 2.旋转机械振动标准 ●旋转机械分类: Ⅰ类:为固定的小机器或固定在整机上的小电机,功率小于15KW。 Ⅱ类:为没有专用基础的中型机器,功率为15~75KW。刚性安装在专用基础上功率小于300KW的机器。 Ⅲ类:为刚性或重型基础上的大型旋转机械,如透平发电机组。 Ⅳ类:为轻型结构基础上的大型旋转机械,如透平发电机组。 ●机械振动评价等级: 好:振动在良好限值以下,认为振动状态良好。 满意:振动在良好限值和报警值之间,认为机组振动状态是可接受的(合格),可长期运行。 不满意:振动在报警限值和停机限值之间,机组可短期运行,但必须加强监测并采取措施。 不允许:振动超过停机限值,应立即停机。 3.振动产生的原因 旋转机械振动的产生主要有以下四个方面原因,转子不平衡,共振,转子不对中和
机械故障。 4.旋转机械振动故障诊断 4.1转子不平衡振动的故障特征 当发生不平衡振动时,其故障特征主要表现在如下方面: 1 )不平衡故障主要引起转子或轴承径向振动,在转子径向测点上得到的频谱图, 转速频率成分具有突出的峰值。 2 )单纯的不平衡振动,转速频率的高次谐波幅值很低,因此在时域上的波形是一个正弦波。 3 )转子振幅对转速变化很敏感,转速下降,振幅将明显下降。 4 )转子的轴心轨迹基本上为一个圆或椭圆,这意味着置于转轴同一截面上相互垂直的两个探头,其信号相位差接近90°。 4.2旋转机械振动模糊诊断 4.2.1 振动模糊诊断基本原理 振动反映了系统状态及变化规律的主要信息,统计资料表明:机械设备的故障有67 % 左右是由于振动引起的,并且能从振动和振动辐射出的噪声反映出来。回转机械的振动信息尤其明显,且振动诊断具有快速、简便、准确和在线诊断等一系列优点,所以振动诊断法是旋转机械状态识别和故障诊断的最有效、最常用的方法。 但是,由于机械系统本身的复杂性以及所摄取的振动信号强烈的模糊性,使故障之间没有清晰的界限,这时利用传统的振动频谱分析,对一个故障可能有多个征兆来表现,一个征兆也可能有多个故障原因的复杂现象,往往难定两者的对应关系进行指导维修。振动模糊法,将模糊数学与振动诊断相结合,利用模糊综合评判技术,较好地处理了回转机械故障的不确定性问题。 4.2.2旋转机械振动模糊诊断法的实现 隶属函数的确定
万方数据
万方数据
万方数据
万方数据
万方数据
硅微陀螺仪零偏温度性能补控方法设计 作者:夏敦柱, 王寿荣, 周百令, Xia Dunzhu, Wang Shourong, Zhou Bailing 作者单位:东南大学微惯性仪表与先进导航技术教育部重点实验室,南京,210096 刊名: 东南大学学报(自然科学版) 英文刊名:Journal of Southeast University(Natural Science Edition) 年,卷(期):2012,42(2) 被引用次数:1次 参考文献(8条) 1.Kulygin A;Schnid U;Seidel H Characterization of a novel micromachined gyroscope under varying ambient pressure conditions[外文期刊] 2008(01) 2.Li Z;Yang Z;Xiao Z A bulk micromachined vibratory lateral gyroscope fabricated with wafer bonding and deep trench etching 2000(1/2/3) 3.Ashwin A S Integrated micromechanical resonant sensor for inertial measurement system 2002 4.Wyatt O D Mechanical analysis and design of vibratory micromachined gyroscopes 2001 5.Jason K P H Modeling and identification of the jet propulsion laboratory vibratory rate microgyroscope 2002 6.房建成;李建利;盛蔚改进的内框架驱动式硅MEMS陀螺温度误差模型[期刊论文]-北京航空航天大学学报 2006(11) 7.Shcheglov K;Evans C;Gutierrez R Temperature dependent characteristics of die JPL silicon MEMS gyroscope 2000 8.Xia Dunzhu;Cheng Shuling;Wang Shourong Temperature compensation method of silicon microgyroscope based on BP neural network[期刊论文]-Journal of Southeast University(English Edition) 2010(01) 引证文献(1条) 1.吴峰.王向军.汤其剑基于数字调节方法的MEMS陀螺零位补偿技术研究[期刊论文]-传感技术学报 2012(12) 本文链接:https://www.doczj.com/doc/7c15017718.html,/Periodical_dndxxb201202019.aspx
目录 实验一振动信号采集与处理相关软件和硬件设计介绍 (2) 实验二单自由度系统阻尼比的测定 (6) 实验三二自由度系统频响函数的测定 (9)
实验一 振动信号采集与处理相关软件和硬件设计介绍 一、 实验目的 1、熟悉振动信号采集与处理软件的基本功能和设置方法; 2、熟悉硬件中各通道代表的意义和设置方式; 3、掌握基本振动测试流程。 二、 振动信号采集和处理软件简介 软件名称 YE6251力学教学装置。 软件介绍 左面板 下面板 至少应为实验所需最大频率的2倍 力锤信号用信号触发,电磁激振器信号可选连续采样 试件类型 不用的通道双击使其为错号,使用的通道使其为对号 实验中可以使用的方法 采样状态栏
上面板和右面板 某测试全图 三、 振动信号采集和处理硬件简介 试件 单自由度系统 模拟单自由度的质量块、阻尼、弹簧系统振动。本实验台的力学模型如下: 时间波形 傅立叶分析 传函幅值,需设置输入和输出通道,用右键 仪器的软件开关 开始采样或停止采样 峰谷 值 等光标选择 缩小x 轴图形显示 放大x 轴图形显示 缩小y 轴图形显示 放大y 轴图形显示 自动量程
二自由度系统 模拟二自由度的质量块、阻尼、弹簧系统振动。本实验台的力学模型如下: 激励设备 力锤 给试件施加脉冲激振力并通过其内置的压力传感器感应力信号。有四个锤头,分别用来测量不同的频段,同时对应不同刚度的材料,本实验以铝制锤头为最佳。 信号发生器(通道2) 产生一定频率的电信号,分为手动调频和自动扫频两种操作方式。手动调频用于产生固定的激励频率;自动扫频是仪器在设定的频段内自动循环扫描。 功率放大器(通道1) 本实验台中,接在信号发生器的后端,电磁激振器的前端。由于信号发生器产生的频率信号通常较小,因此在将其传送到激振器之前,需要将信号通过功率放大器进行放大。 电磁激振器 对试件进行激励。 采集设备 位移传感器 采用非接触式感应试件位移。 加速度传感器 感应试件加速度。 力和加速度复合传感器 其输出包含两路信号:力和加速度。一般感应激振器的激振力并响应试件的加速度。 位移测量仪(通道4) 本实验台中,位移测量仪用来测量电涡流位移传感器的信号幅值大小,同时将该信号输入计算机以便于数据分析。 力测量仪(通道5) 通过该通道实时测量力值大小,同时将该信号输入计算机以便于数据分析。 加速度测量仪(通道6和通道7) 测量加速度传感器的电信号大小,同时将该信号输入计算机以便于数据分
南昌航空大学实验报告 课程名称:数字信号处理 实验名称:滚动轴承的振动信号特征分析实验时间: 2013年5月14日 班级: 100421 学号: 10042134 姓名:吴涌涛 成绩:
滚动轴承的振动信号特征分析 一、实验目的 利用《数字信号处理》课程中学习的序列运算、周期信号知识、DFT 知识,对给定的正常轴承数据、内圈故障轴承数据、外圈故障轴承数据、滚珠故障轴承数据进行时域特征或频域特征提取和分析,找出能区分四种状态(滚动轴承的外圈故障、内圈故障、滚珠故障和正常状态)的特征。 二、实验原理 振动机理分析:机械在运动时,由于旋转件的不平衡、负载的不均匀、结构刚度的各向异性、间隙、润滑不良、支撑松动等因素,总是伴随着各种振动。 振动的幅值、频率和相位是振动的三个基本参数,称为振动三要素。 幅值:幅值是振动强度的标志,它可以用峰值、有效值、平均值等方法来表示。 频率:不同的频率成分反映系统内不同的振源。通过频谱分析可以确定主要频率成分及其幅值大小,从而寻找振源,采取相应的措施。 相位:振动信号的相位信息十分重要,如利用相位关系确定共振点、测量振型、旋转件动平衡、有源振动控制、降噪等。对于复杂振动的波形分析,各谐波的相位关系是不可缺少的。 在振动测量时,应合理选择测量参数,如振动位移是研究强度和变形的重要依据;振动加速度与作用力或载荷成正比,是研究动力强度和疲劳的重要依据;振动速度决定了噪声的高低,人对机械振动的敏感程度在很大频率范围内是由速度决定的。速度又与能量和功率有关,并决定动量的大小。 提取振动信号的幅域、时域、频域、时频域特征,根据特征进行故
障有无、故障类型和故障程度三个层次的判断。 三、 实验内容 Step1、使用importdata ()函数导入振动数据。 Step2、把大量数据分割成周期为单元的数据,分割方法为: 设振动信号为{x k }(k =1,2,3,…,n )采样频率为f s ,传动轴的转动速率为V r 。 采样间隔为: 1 s t f ?= (1) 旋转频率为: 60 r r V f = (2) 传动轴的转动周期为: 1 r T f = (3) 由式(1)和(3)可推出振动信号一个周期内采样点数N : 1 1s r r s f f T N t f f = ==? (4) 由式(2)可得到传动轴的转动基频f r =29.95Hz ,再由式(3)可得到一个周期内采样点数N=400.67,取N =400。 Step3、提取振动信号的特征,分析方法包括: 1、时域统计分析指标(波形指标(Shape Factor)、峰值指标(Crest Factor)、脉冲指标(Impulse Factor)、裕度指标(Clearance Factor)、峭度指标(KurtosisValue) )等,相关计算公式如下: (1)波形指标: P f X WK X = (5) 其中,P X 为峰值,X 为均值。p X 计算公式如下:
振动测量仪器知识 一、概述 (一)用途 振动测量仪器是一种测量物体机械振动的测量仪器。测量的基本量是振动的加速度、速度和位移等,可以测量机械振动和冲击振动的有效值、峰值等,频率范围从零点几赫兹~几千赫兹。外部联接或内部设置带通滤波器,可以进行噪声的频谱分析。随着电子技术尤其是大规模集成电路和计算机技术的发展,振动测量仪器的许多功能都通过数字信号处理技术代替模拟电路来实现。这不仅使得电路更加简化,动态范围更宽,而且功能和稳定性也大大提高,尤其是可以实现实时频谱分析,使振动测量仪器的用途更加广泛。 (二)分类与特点 振动测量仪器按功能来分:分为工作测振仪、振动烈度计、振动分析仪、激振器(或振动台)、振动激励控制器、振动校准器测量机械振动,具有频谱分析功能的称为频谱分析仪,具有实时频谱分析功能的称为实时频谱分析仪或实时信号分析仪,具有多路测量功能的多通道声学分析仪。 振动测量仪器按采用技术来分:分为模拟振动计、数字化振动计和多通道实时信号分析仪。 振动测量仪器按测量对象来分:分为测量机械振动的通用振动计,测量振动对人体影响的人体(响应)振动计、测量环境振动的环境振动仪和振动激励控制器。 ●工作测振仪特点 通常是手持式,操作简单、价格便宜,只测量并显示振动的加速度、速度和位移等。以前用电表显示测量值,现在都是用数字显示。通常不带数据储存和打印功能,用于一般振动测量。振动烈度计是指专用于测量振动烈度(10 Hz~1000 Hz 频率范围的速度有效值)的振动测量仪器。 ●实时信号分析仪特点 实时信号分析仪是一种数字频率分析仪,它采用数字信号处理技术代替模拟电路来进行振动的测量和频谱分析。当模拟信号通过采样及A/D转换成数字信号后,进入数字计算机进行运算,实现各种测量和分析功能。实时信号分析仪可同时测量加速度、速度和位移,均方根、峰值(Peak)、峰-峰值(Peak-Peak)检波可并行工作。不仅分析速度快,而且也能分析瞬态信号,在显示器上实时显示出频谱变化,还可将分析得到的数据输出并记录下来。 ●动态信号测试和分析系统特点 包含多路高性能数据采集、多功能信号发生、基本信号分析,还可以选择高级信号分析;以及模态分析、故障分析等应用。尤其适合振动、噪声、冲击、应变、温度等信号的采集和分析。 ●人体(响应)振动计特点 主要用于测量和分析振动对人体的影响。人体振动又分为人体全身振动和手传振动,测量计权振动加速度有效值。仪器性能应符合GB/T 23716-2009《人体对振动的响应——测量仪器》的要求,对于全身振动(频率计权W c、W d、W e、W j、W k、)和用于进行轨道车辆舒适度评价的全身振动(频率计权W b)频率范围为0.5 Hz~80 Hz,对于建筑物内连续与冲击引起的振动(频率计权W m)频率范围为1 Hz~80 Hz,
基于LabVIEW 的陀螺仪振动信号采集与分析 窦修朋,尤传富,欧阳国鑫 (长春工业大学电气与电子工程学院,吉林长春130012) 摘 要:针对陀螺马达振动信号的微弱性,通过数据采集卡检测到的信号要进行大量复杂的线形系统分析,要求数 据准确,根据虚拟仪器设计思想在PC 下利用图形化编辑语言LabVIEW 对陀螺马达的振动信号进行过采样数据采集、波形显示、时域分析、数字滤波、数据存储、频域分析,从而实现对振动信号的多通道信号采集和实时分析。系统逻辑图形清晰,可以有效的防止波形失真,误差小,起到了很好的故障诊断分析作用,在工程应用中实用性强。 关键词:LabVIEW 系统;虚拟仪器;过采样;时域分析;频域分析中图分类号:TP311.52;TP274+.2 文献标识码:A 文章编号:1674-5124(2009)02-0064-03 Acquisition and analysis of gyroscopic vibration signal based on LabVIEW DOU Xiu-peng ,YOU Chuan-fu ,OUYANG Guo-xin (School of Electric and Electricity Engineering ,Changchun University of Technology ,Changchun 130012,China )Abstract:According to the weakness of the vibration signal of gyroscope motors ,a large number of complex linear system analyses needed to process the signal detected by data acquisition card ,and the data must be precise ,those of the gyroscope motor vibration signal such as data acquisition ,waveform display ,time domain analysis ,digital filtering ,data storage and frequency -domain and so on were analyzed according to the virtual instrument design with graphical progamming software LabVIEW on PC to realize the multi -channel signal acquisition and real -time analysis of the vibration signal.The logic diagrams of this system are clear ,the waveform distortion can be effectively prevented ,and the error can be reduced.Thus ,this system can play a very important role in the fault diagnosis and has very practical impacts on engineering. Key words:LabVIEW ;Virtual instrument ;Over-sampling ;Time-domain analysis ;Frequency domain analysis 收稿日期:2008-09-05;收到修改稿日期:2008-11-30作者简介:窦修朋(1982-),男,河北沧州市人,硕士研究生, 专业方向为信号分析及处理。 1引言 随着科学的不断发展,人们对惯性导航系统的 陀螺仪要求越来越高。 陀螺马达是陀螺仪的心脏,要使陀螺定向精度高,必须保证陀螺马达在工作过程中正常工作,尽量减少无规则振动和噪声。转子要保持高度的动态平衡,除此之外,马达轴承在高速旋转时也产生振动信号,转子高速旋转引起风阻和由此引起的噪声会诱导转子转动。而信号往往淹没在机械本体几信号处理电路包含的大量噪声中[1],这些振动和噪声都会影响陀螺罗盘的定向性能。因此,在陀螺马达的设计和安装高度中,非常需要明确振源,是由转子不平衡引起,还是轴承振动或风阻噪声引起的。 振动测试及分析系统主要用来分析陀螺转子的振动情况。引起陀螺转子振动的因素可分为质心 偏移因素和非质心偏移因素,质心偏移因素可通过 动平衡消除,而非质心偏移因素多数是由轴承(特别是滚珠轴承)引起的,无法通过动平衡消除。振动大的陀螺在系统使用中会对系统性能产生较大影 响。因此, 在陀螺总装前对陀螺马达进行振动测试和分析十分必要。 计算机和仪器的密切结合而成的虚拟仪器是目前仪器发展的一个重要方向。虚拟仪器的最突出的特点可以发挥出计算机的能力,具有强大的数值处理功能,可以根据自己的需要创造出功能强大的 仪器。在这一领域内, 使用较为广泛的计算机和开发环境的是美国NI 公司的LabVIEW 。整个系统只有输入、输出端,其他仪器功能键都在可视软件板上完成,操作简单方便[2],并且能进行远程控制[3]。 2系统硬件设计 如图1所示,陀螺仪振动的信号由传感器接收,经信号调理、数据采集卡后传递到虚拟仪器控制面版,其主要功能如下。 第35卷第2期2009年3月中国测试 CHINA MEASUREMENT &TEST Vol.35No.2Mar.2009