
高斯色噪声的产生实验报告一.实验要求
用SPW或者Matlab产生高斯色噪声,其功率谱满足高斯函数:
2
2
()
2
()
c
f
f f
S fσ
-
-
=
其中,2000
c
f Hz
=,50
f
Hz
σ=
二.实验原理
首先通过实验1的正态分布随机数生成程序生成高斯白噪声,然后将该白噪声通过一个滤波器滤波,滤波器的频率响应满足上述的频谱特性,从而得到所需的色噪声。
三.仿真分析
频率(kHz)
功
率/
频
率
(
d
B
/
H
z
)
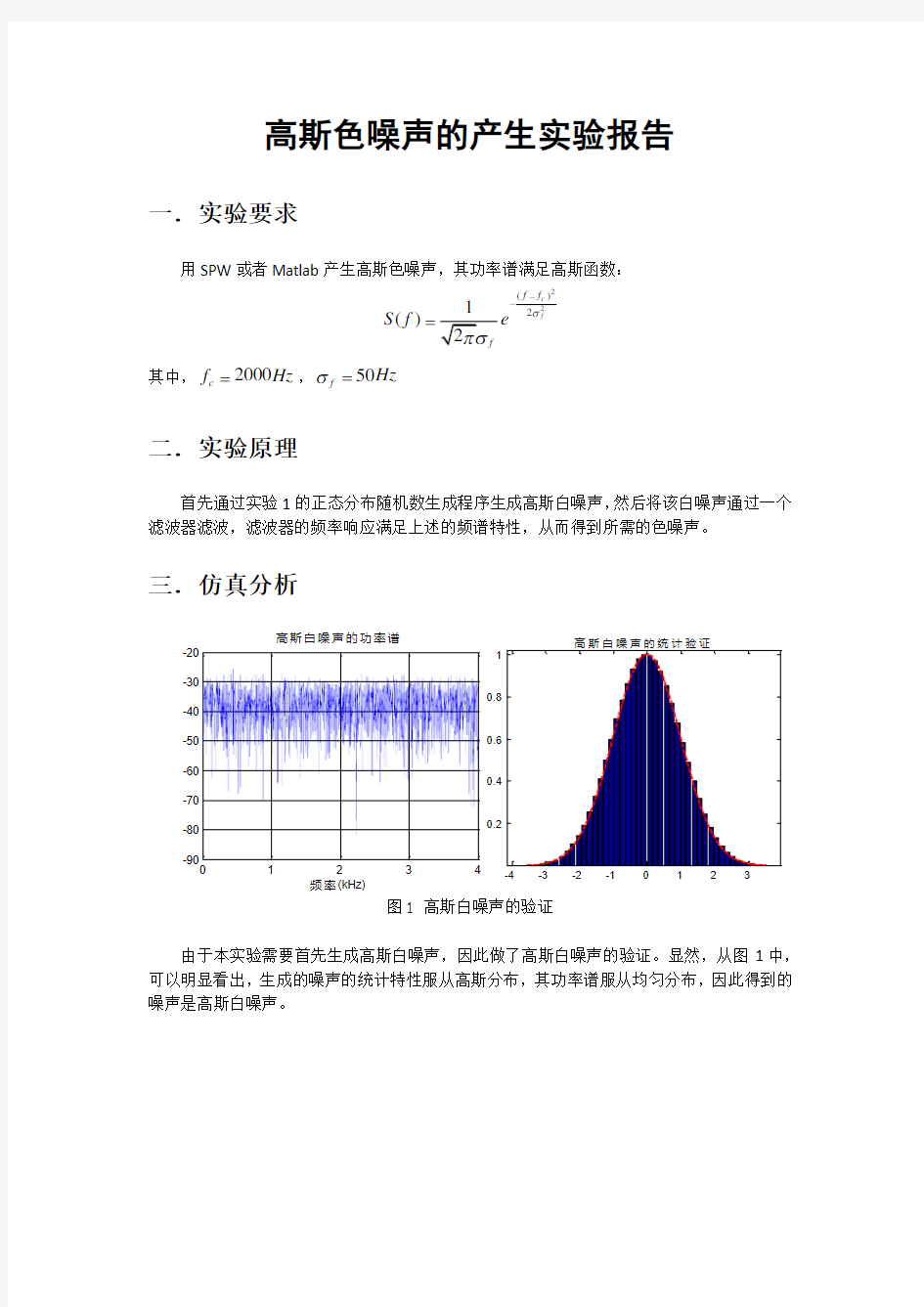
高斯白噪声的功率谱
图1 高斯白噪声的验证
由于本实验需要首先生成高斯白噪声,因此做了高斯白噪声的验证。显然,从图1中,可以明显看出,生成的噪声的统计特性服从高斯分布,其功率谱服从均匀分布,因此得到的噪声是高斯白噪声。
-3
滤波器的幅频响应
幅度
频率(Hz )
图2 滤波器的幅频响应
如图2所示,设计的滤波器的幅频响应满足高斯分布,其中心频率为2000Hz ,满足设计要求。
频率 (kHz)
功率/频率 (d B /H z )
高斯色噪声的功率谱
-9
高斯色噪声的功率谱
功率/频率(W /H z )
频率(Hz )
图3 高斯色噪声的功率谱估计
将图1中所描述的高斯白噪声通过图2描述的滤波器进行滤波,从而得到了符合频率分布的高斯色噪声。图3采用两种功率谱估计的方法对得到的高斯色噪声进行了功率谱估计。显然,得到的色噪声的功率谱特性满足高斯高斯,说明得到的色噪声就是高斯色噪声,其功率谱满足高斯函数。
三.附录
本实验的程序如下:
clear; clc;
f_sample=8000; step =1; f_c=2000; segma_f=50; ff=0:step:f_sample;
S_f = 1/( sqrt(2*pi)*segma_f) *exp(- (ff-f_c).^2/2/segma_f^2);
u=Probability_method(length(ff));
u_fft = fft(u);
f_filter=u_fft.*S_f;
u_ifft = ifft(f_filter);
%--------- 画图--------
figure(1) %滤波器幅频特性
plot(ff,S_f,'linewidth',2)
grid on
title('滤波器幅频特性');
%高斯分布白噪声功率谱估计
figure(2)
Hs=spectrum.periodogram;
psd(Hs,u,'Fs',f_sample);
grid on
%-- %高斯色噪声功率谱估计
figure(3)
[hk,f]=pwelch(u_ifft,70,1,[],f_sample,'twosided'); plot(f,hk,'b','LineWidth',2)
grid on
title('高斯色噪声功率谱估计');
Hs=spectrum.periodogram;
figure;
psd(Hs,u_ifft,'Fs',f_sample);
grid on
高斯噪声是一种随机噪声,在任选瞬时中任取n个,其值按n个变数的高斯概率定律分布。注: 1,高斯噪声完全由其时变平均值和两瞬时的协方差函数来确定,若噪声为平稳的,则平均值与时间无关,而协方差函数则变成仅和所考虑的两瞬时之差有关的相关函数,它在意义上等效于功率谱密度。 2,高斯噪声可以是大量独立的脉冲所产生的,从而在任何有限时间间隔内,这些脉冲中的每一个脉冲值与所有脉冲值的总和相比都可忽略不计。 3,实际上热噪声、散弹噪声及量子噪声都是高斯噪声。 白噪声是一种功率频谱密度为常数的随机信号或随机过程。换句话说,此信号在各个频段上的功率是一样的,由于白光是由各种频率(颜色)的单色光混合而成,因而此信号的这种具有平坦功率谱的性质被称作是“白色的”,此信号也因此被称作白噪声。相对的,其他不具有这一性质的噪声信号被称为有色噪声(功率谱密度随频率变化)。 理想的白噪声具有无限带宽,因而其能量是无限大,这在现实世界是不可能存在的。实际上,我们常常将有限带宽的平整讯号视为白噪音,因为这让我们在数学分析上更加方便。然而,白噪声在数学处理上比较方便,因此它是系统分析的有力工具。一般,只要一个噪声过程所具有的频谱宽度远远大于它所作用系统的带宽,并且在该带宽中其频谱密度基本上可以作为常数来考虑,就可以把它作为白噪声来处理。例如,热噪声和散弹噪声在很宽的频率范围内具有均匀的功率谱密度,通常可以认为它们是白噪声。 白噪声的功率谱密度是一个常数。这是因为:白噪声的时域信号中任意两个不同时刻是不相关的,因此,白噪声的自相关函数为冲击函数,因此,白噪声的功率谱密度为常数。(自相关函数和功率谱密度是傅立叶变换对)。 当随机的从高斯分布中获取采样值时,采样点所组成的随机过程就是“高斯白噪声”;同理,当随机的从均匀分布中获取采样值时,采样点所组成的随机过程就是“均匀白噪声”。 “非白的高斯”噪声——高斯色噪声。这种噪声其分布是高斯的,但是它的频谱不是一个常数,或者说,对高斯信号采样的时候不是随机采样的,而是按照某种规律来采样的。 仿真时经常采用高斯白噪声是因为实际系统(包括雷达和通信系统等大多数电子系统)中的主要噪声来源是热噪声,而热噪声是典型的高斯白噪声,高斯噪声下的理想系统都是线性系统。 高斯白噪声:如果一个噪声,它的幅度分布服从高斯分布,而它的功率谱密度又是均匀分布的,则称它为高斯白噪声。 热噪声和散粒噪声是高斯白噪声。 所谓高斯白噪声中的高斯是指概率分布是正态函数,而白噪声是指它的二阶矩不相关,一阶矩为常数,是指先后信号在时间上的相关性。这是考查一个信号的两个不同方面的问题。
色噪声原理及matlab实现 1、实验目的: ⑴了解随机信号自身的特性,包括均值(数学期望)、均方值、方差、相关函数、概率密度、频谱及功率谱密度等。 (2)了解色噪声的基本概念和分析方法,掌握用matlab、c\c++软件仿真和分析色噪声的方法。 ⑶掌握随机信号的分析方法。 2、实验原理: 我们把除了白噪声之外的所有噪声都称为有色噪声。就像白光一样,除了白光就是有色光。 色噪声中有几个典型: ⑴粉红噪声。粉红噪音是自然界最常见的噪音,简单说来,粉红噪音的频率分量功率主要分布在中低频段。从波形角度看,粉红噪音是分形的,在一定的范围内音频数据具有相同或类似的能量。从功率(能量)的角度来看,粉红噪音的能量从低频向高频不断衰减,曲线为1/f,通常为每8度下降3分贝。粉红噪声的能量分布在任一同比例带宽中是相等的!比如常见的三分之一倍程频带宽100Hz的范围89.2__112和1000Hz的892__1120是相等的。 在给定频率范围内(不包含直流成分),随着频率的增加,其功率密度每倍频程下降3dB(密度与频率成反比)。每倍频的功率相同,但要产生每倍频程3dB的衰减非常困难,因此,没有纹波的粉红噪声在现实中很难找到。 粉红噪声低频能下降到接近0Hz(不包括0Hz)高频端能上到二十几千赫,而且它在等比例带宽内的能量是相等的(误差只不过0.1dB左右)。粉红噪声的功率普密度图: ⑵红噪声(海洋学概念)。这是有关海洋环境的一种噪声,由于它是有选择地吸收较高的频率,因此称之为红噪声。 ⑶橙色噪声。该类噪声是准静态噪声,在整个连续频谱范围内,功率谱有限且零功率窄带信号数量也有限。这些零功率的窄带信号集中于任意相关音符系统的音符频率中心上。由于消除了所有的合音,这些剩余频谱就称为橙色音符。 ⑷蓝噪声。在有限频率范围内,功率密度随频率的增加每倍频增长3dB(密度正比于频率)。对于高频信号来说,它属于良性噪声。
4.4 色噪声的产生与分析 1、实验原理 我们把除了白噪声之外的所有噪声都称为有色噪声。就像白光一样,除了白光就是有色光。 色噪声中有几个典型: ⑴粉红噪声。粉红噪音是自然界最常见的噪音,简单说来,粉红噪音的频率分量功率主要分布在中低频段。从波形角度看,粉红噪音是分形的,在一定的范围内音频数据具有相同或类似的能量。从功率(能量)的角度来看,粉红噪音的能量从低频向高频不断衰减,曲线为1/f,通常为每8度下降3分贝。粉红噪声的能量分布在任一同比例带宽中是相等的!比如常见的三分之一倍程频带宽100Hz的范围89.2__112和1000Hz的892__1120是相等的。 在给定频率范围内(不包含直流成分),随着频率的增加,其功率密度每倍频程下降 3dB(密度与频率成反比)。每倍频的功率相同,但要产生每倍频程3dB的衰减非常困难,因此,没有纹波的粉红噪声在现实中很难找到。 粉红噪声低频能下降到接近0Hz(不包括0Hz)高频端能上到二十几千赫,而且它在等比例带宽内的能量是相等的(误差只不过0.1dB左右)。粉红噪声的功率普密度图如图2-10 所示: 图2-10粉红噪声的功率普密度 ⑵红噪声(海洋学概念)。这是有关海洋环境的一种噪声,由于它是有选择地吸收较高的频率,因此称之为红噪声。 ⑶橙色噪声。该类噪声是准静态噪声,在整个连续频谱范围内,功率谱有限且零功率窄带信号数量也有限。这些零功率的窄带信号集中于任意相关音符系统的音符频率中心上。由于消除了所有的合音,这些剩余频谱就称为“橙色”音符。 ⑷蓝噪声。在有限频率范围内,功率密度随频率的增加每倍频增长3dB(密度正比于频率)。对于高频信号来说,它属于良性噪声。 ⑸紫噪声。在有限频率范围内,功率密度随频率的增加每倍频增长6dB(密度正比于频率的平方值)。 ⑹灰色噪声。该噪声在给定频率范围内,类似于心理声学上的等响度曲线(如反向的A-加权曲线),因此在所有频率点的噪声电平相同。 ⑺棕色噪声。在不包含直流成分的有限频率范围内,功率密度随频率的增加每倍频下降6dB(密度与频率的平方成反比)。该噪声实际上是布朗运动产生的噪声,它也称为随机飘移噪声或醉鬼噪声。
有色噪声下的卡尔曼滤波 摘要 Kalman滤波技术是一种高效率的递归滤波器(自回归滤波器),它是现代信息处理中的重要工具。但是基本的Kalman滤波基本方程中要求系统噪声和量测噪声必须为互不相关的均值为零的白噪声过程, 限制了应用的范围。本文研究了在系统噪声和量测噪声都是有色噪声条件下的Kalman滤波方法, 并推导了全套的滤波方程。最后以GPS多天线三维姿态测量系统为例,根据推导出的动态噪声、观测噪声为有色噪声的线性系统滤波公式,在MATLAB环境下进行了仿真实验。 关键词:有色噪声,卡尔曼滤波,白噪声 ABSTRACT Kalman filtering technology is a kind of efficient algorithm.on filter (autoregressive filter), it is an important tool in modern information processing. But the basic Kalman filtering basic equations of noise and measurement requirements system for irrelevant noise must be zero of white noise process, limit the scope of application. In this paper we studied system noises and measurement noise are colored noise Kalman filtering method under the conditions, and derived full set of filter equation. Finally for example with GPS multi-antenna 3d pose measurement system, Carried out in MATLAB simulation experiment according to the dynamic noise is deduced, observation noise for colored noise linear system filtering formula. Key Words:Colored Noise, Kalman Filter, White Noise
本文科普一下高斯白噪声(white Gaussian noise,WGN)。 百度百科上解释为“高斯白噪声,幅度分布服从高斯分布,功率谱密度服从均匀分布”,听起来有些晦涩难懂,下面结合例子通俗而详细地介绍一下。 白噪声,如同白光一样,是所有颜色的光叠加而成,不同颜色的光本质区别是的它们的频率各不相同(如红色光波长长而频率低,相应的,紫色光波长短而频率高)。白噪声在功率谱上(若以频率为横轴,信号幅度的平方为功率)趋近为常值,即噪声频率丰富,在整个频谱上都有成分,即从低频到高频,低频指的是信号不变或缓慢变化,高频指的是信号突变。 由傅里叶变换性质可知,时域有限,频域无限;频域有限,时域无限。那么频域无限的信号变换到时域上,对应于冲击函数的整数倍(由公式也可推得:)。即说明在时间轴的某点上,噪声孤立,与其它点的噪声无关,也就是说,该点噪声幅值可以任意,不受前后点噪声幅值影响。简而言之,任意时刻出现的噪声幅值都是随机的(这句话实际上说的就是功率谱密度服从均与分布的意思,不同的是,前者从时域角度描述,而后者是从频域角度描述)。这里要指出功率谱密度(Power Spectral Density,PSD)的概念,它从频域角度出发,定义了信号的功率是如何随频率分布的,即以频率为横轴,功率为纵轴。 既然白噪声信号是“随机”的,那么反过来,什么叫做“相关”呢?顾名思义,相关就是某一时刻的噪声点不孤立,和其它时刻的噪声幅值有关。其实相关的情况有很多种,比如此时刻的噪声幅值比上一时刻的大,而下一时刻的噪声幅值比此时刻的还大,即信号的幅值在时间轴上按从小到大的顺序排列。除此之外,幅值从大到小,或幅值一大一小等都叫做“相关”,而非“随机”的。 解释完了“白噪声”,再来谈谈“高斯分布”。高斯分布,又名正态分布(normal distribution)。概率密度函数曲线的形状又两个参数决定:平均值和方差。简单来说,平均值决定曲线对称中线,方差决定曲线的胖瘦,即贴近中线的程度。概率密度定义了信号出现的频率是如何随着其幅值变化的,即以信号幅值为横轴,以出现的频率为纵轴。因此,从概率密度角度来说,高斯白噪声的幅度分布服从高斯分布 描述了“白噪声”和“高斯噪声”两个含义,那么,回到文章开头的解释:高斯白噪声,幅度分布服从高斯分布,功率谱密度服从均匀分布。它的意义就很明确了,上半句是从空域(幅值)角度描述“高斯噪声”,而下半句是从频域角度描述“白噪声”。 下面以matlab程序演示,感性认识一下高斯白噪声。 程序1(高斯白噪声):
3.2.7 系统噪声或观测噪声是有色噪声的卡尔曼滤波 在前面推导Kalman 滤波方程时,都是假定)(k w 和)(k v 都是白噪声。而实际上,多数情况下,)(k w 和)(k v 可能是有色噪声。通常情况下,对一些特定的有色噪声可通过成型滤波器化成白噪声,现举例说明如何把某些特定的有色噪声用白噪声通过成型滤波器来表示的问题。 设)(k ξ是一平稳随机序列,其相关函数为 ||,j i t t j i De R --=,j i t t > 并可写出成型滤波器方程如下 )()(),1()1(k n k k k k ++ψ=+ξξ 式中的),1(k k +ψ为成型滤波器转移阵 ||1),1(k k t t e k k --+=+ψ
)(k n 为均值为零的白噪声序列 {}0)(=k n E , {} kj t t T k k e D j n k n E δ)1()()(||21--+-= 下面分三种情况讨论有色噪声情况的Kalman 滤波: 1)控制系统附加噪声是有色噪声,观测系统附加噪声是白噪声; 2)控制系统附加噪声是白噪声,观测系统附加噪声是有色噪声; 3)控制系统和观测系统的附加噪声均为有色噪声。 有色序列的类型还有许多种,本节仅讨论高斯—马尔可夫型随机序列。理由不言而喻,人们知道,任何一个高斯—马尔可夫型随机序列,都可以看成是高斯白噪声驱动下,某个离散线性系统的状态序列。因此,可以通过扩充状态变量法,来把附加噪声是有色的情况白化!下面分情况进行具体的讨论。
3.2.7.1 控制系统附加噪声是有色噪声,观测系统附加噪声是白噪声 设系统状态和观测方程为 )(),1()(),1()1(k w k k k x k k A k x +Γ++=+ (3.2.7.1) )()()()(k v k x k C k z += (3.2.7.2) 式中)(k w 为高斯—马尔可夫型随机序列(有色噪声)。 由于)(k w 为高斯—马尔可夫型随机序列,故 )()(),1()1(k k w k k H k w η++=+ 这里}0),({≥k k η为与)0(W 不相关的高斯白噪声。且 1)}0),,1({≥+k k k H 为已知; 2){}0)(=k E η,{})(var )(k k Q ηη=为已知; 3)}0),({≥k k η与}0),({≥k k w 和)0(x 互不相关。
第6章非高斯有色噪声中的谐波恢复问题(Ⅰ) 本章研究具有非对称分布的非高斯ARMA有色噪声中的谐波恢复问题。通过分析谐波信号和非高斯有色噪的三阶累积量特性,提出了基于二阶、三阶累积量的混合SVD-TLS方法(Second-and Third-order Cumulant-based Hybrid SVD-TLS,我们称作STCH-SVD-TIS)以及混合ESPRIT方法(STCH-ESPRIT)。即先由有噪观测过程的三阶累积量估计噪声模型AR部分参数,然后由AR多项式对有噪观测值进行预滤波,最后利用滤波输出过程的自相关函数并结合高分辨率谱估计方法(如SVD-TLS,ESPRIT)来估计谐波参数。本章还通过标准的仿真实验验证了这两种方法的有效性和高分辨率。 6.1 概述 我们知道,在现有的有色噪声中的谐波恢复方法中,主要有系统辨识方法(包括最大似然(ML)法、广义最小二乘(GLS)法和迭代逆滤波(ITIF)法、噪声模型假设(如MA噪声模型假设法和AR噪声模型假设法)以及四阶累积量法。综合考查上述各类方法,系统辨识方法和噪声模型假设法必须预知噪声的模型结构,然而至今不存在着任何可用于建立噪声模型的有效方法;同时,背景噪声必须为高斯噪声(MA噪声模型假设法和AR噪声模型假设法除外),因为只有在高斯假设下,上述方法的估计结果才能得到最小二乘估计。四阶累积量方法尽管不需要假定噪声模型,但它仅适用于高斯背景噪声情形,当然这也是该类方法的最大优点。由此可以得出这样一个结论:现有的有色噪声中的谐波恢复方法绝大多数都是在噪声的高斯假设下进行研究的。尽管MA噪声模型假设法也可用于非高斯噪声情形,但由于MA模型用于具有尖锐谱峰的噪声模型描述时,往往需要很高的阶次,况且模型的阶次无法确定。因此有必要研究一般非高斯ARMA有色噪声中的谐波恢复方法。 在实际应用中,有色的非高斯噪声环境在声纳系统和信号检测中常常遇到,而具有非对称分布的非高斯噪声是一种很常见的情形,如指数分布、威布尔分布等,因此,研究具有非对称分布的非高斯噪声中的谐波恢复方法具有广泛的应用前景。 本章首先分析了谐波信号和非高斯有色噪声的三阶累积量特性,由于谐波信号的三阶累积量恒等于零,而具有非对称分布的非高斯ARMA有色噪声的三阶累积量不等于零。因此,利用有噪观测值的三阶累积量可以建立非高斯ARMA噪声的模型参数。由于有噪观测值经噪声模型的AR多项式滤波后得到的滤波输出过程的自相关函数和谐波信号预测模型的AR参数正好满足一组特殊的修正Yule-Walker(MYW)方程,因此,基于自相关的高分辨率方法都可以用来确定模型的参数。基于这一点,本章提出了STCH-SVD-TLS方法和STCH-ESPRIT方法,前者通过求解线性方程组的解来实现,后者通过求解矩阵对的广义特征值来实现。 6.2 模型假设 设零均值有噪观测值为 x n n y+ = w (n ( ) ( ) )
%白噪声及有色噪声序列的产生 设ξ(k) 为均值为0,方差为1的高斯白噪声序列,e(k)为有色噪声序 列: 1 1 1 12 123 () ()()()() () 10.50.2 () 1 1.50.70.1 C z e k G z k k D z z z k z z z ξξ ξ - - - -- --- == ++ = -++ 高斯白噪声序列ξ(k)在Matlab中由rand()函数产生,程序如下:clear all; close all; L=500; %仿真长度 d=[1 -1.5 0.7 0.1]; c=[1 0.5 0.2]; % 分子分母多项式系数 nd=length(d)-1 ;nc=length(c)-1; %阶次 xik=zeros(nc,1); %白噪声初值 ek=zeros(nd,1); xi=randn(L,1); %产生均值为0,方差为1的高斯白噪声序列 for k=1:L e(k)=-d(2:nd+1)*ek+c*[xi(k);xik]; %产生有色噪声 %数据更新 for i=nd:-1:2 ek(i)=ek(i-1); end
ek(1)=e(k); for i=nc:-1:2 xik(i)=xik(i-1); end xik(1)=xi(k); end subplot(2,1,1); plot(xi); xlabel('k');ylabel('噪声幅值');title('白噪声序列'); subplot(2,1,2); plot(e); xlabel('k');ylabel('噪声幅值');title('有色噪声序列');
随机信号分析实验 一、实验目的: ⑴了解随机信号自身的特性,包括均值(数学期望)、均方值、方差、相关函数、概率密度、频谱及功率谱密度等。 (2)了解色噪声的基本概念和分析方法,掌握用matlab、c\c++软件仿真和分析色噪声的方法。 ⑶掌握随机信号的分析方法。 二、实验原理: 我们把除了白噪声之外的所有噪声都称为有色噪声。就像白光一样,除了白光就是有色光。 色噪声中有几个典型: ⑴粉红噪声。粉红噪音是自然界最常见的噪音,简单说来,粉红噪音的频率分量功率主要分布在中低频段。从波形角度看,粉红噪音是分形的,在一定的范围内音频数据具有相同或类似的能量。从功率(能量)的角度来看,粉红噪音的能量从低频向高频不断衰减,曲线为1/f,通常为每8度下降3分贝。粉红噪声的能量分布在任一同比例带宽中是相等的!比如常见的三分之一倍程频带宽100Hz的范围89.2__112和1000Hz的892__1120是相等的。 在给定频率范围内(不包含直流成分),随着频率的增加,其功率密度每倍频程下降3dB(密度与频率成反比)。每倍频的功率相同,但要产生每倍频程3dB的衰减非常困难,因此,没有纹波的粉红噪声在现实中很难找到。 粉红噪声低频能下降到接近0Hz(不包括0Hz)高频端能上到二十几千赫,而且它在等比例带宽内的能量是相等的(误差只不过0.1dB左右)。粉红噪声的功率普密度图: ⑵红噪声(海洋学概念)。这是有关海洋环境的一种噪声,由于它是有选择地吸收较高的频率,因此称之为红噪声。 ⑶橙色噪声。该类噪声是准静态噪声,在整个连续频谱范围内,功率谱有限且零功率窄带信号数量也有限。这些零功率的窄带信号集中于任意相关音符系统的音符频率中心上。由于消除了所有的合音,这些剩余频谱就称为橙色音符。 ⑷蓝噪声。在有限频率范围内,功率密度随频率的增加每倍频增长3dB(密
2.5 通信中的常见噪声 本节知识要点: 白噪声高斯噪声误差函数 互补误差函数高斯型白噪声窄带高斯噪声 窄带系统正弦信号加窄带高斯噪声 本节介绍几种噪声,它们在通信系统的理论分析中常常用到,实际统计与分析研究证明,这些噪声的特性是符合具体信道特性的。 2.5.1 白噪声 在通信系统中,经常碰到的噪声之一就是白噪声。所谓是指它的功率谱密度函数在整个频域 内是常数,即服从均匀分布。之所以称它为“白”噪声,是因为它类似于光学中包括全部可见光 频率在内的白光。凡是不符合上述条件的噪声就称为有色噪声。 通常被定义为
(2-22) 式中,是一个常数,单位为W/Hz。若采用单边频谱,即频率在()的范围内,白噪声的功率谱密度函数又常写成 (2-23)由信号分析的有关理论可知,功率信号的功率谱密度与其自相关函数互为傅氏变换对,即 (2-24)因此,为 (2-25) 式(2-25)表明,白噪声的自相关函数是一个位于处的冲激函数,它的强度为。这说明,白噪声只有在 /2时才相关,而在任意两个不同时刻上的随机取值都是不相关的。白噪声的功率谱密度及其自相关函数,如图2-11所示。
实际上完全理想的白噪声是不存在的,通常只要噪声功率谱密度函数均匀分布的频率范围远远超过通信系统工作频率范围时,就可近似认为是白噪声。例如,热噪声的频率可以高到Hz,且功率谱密度函数在0~Hz 内基本均匀分布,因此可以将它看作白噪声。 2.5.2 高斯噪声 在实际信道中,另一种常见噪声是高斯噪声。所谓是指它的概率密度函数服从高斯分布(即正态分布)的一类噪声。其一维概率密度函数可用数学表达式表示为 (2-26)
浅谈高斯白噪声信号分析 一.有色噪声与白噪声: 白噪声是指在较宽的频率范围内,各等带宽的频带所含的噪声能量 相等的噪声。一般在物理上把它翻译成白噪声(white noise)。 白噪声或白杂讯,是一种功率频谱密度为常数的随机信号或随机过程。换句话说,此信号在各个频段上的功率是一样的,由于白光是由各种频率(颜色)的单色光混合而成,因而此信号的这种具有平坦功率谱的性质被称作是“白色的”,此信号也因此被称作白噪声。相对的,其他不具有这一性质的噪声信号被称为有色噪声。 理想的白噪声具有无限带宽,因而其能量是无限大,这在现实世界是不可能存在的。实际上,我们常常将有限带宽的平整讯号视为白噪音,因为这让我们在数学分析上更加方便。然而,白噪声在数学处理上比较方便,因此它是系统分析的有力工具。一般,只要一个噪声过程所具有的频谱宽度远远大于它所作用系统的带宽,并且在该带宽中其频谱密度基本上可以作为常数来考虑,就可以把它作为白噪声来处理。例如,热噪声和散弹噪声在很宽的频率范围内具有均匀的功率谱密度,通常可以认为它们是白噪声。 当你需要专心工作,而周遭总是有繁杂的声音时,就可以选用这两种声音来加以遮蔽。一般来说,通常的情况下你可以选用白色噪音,而粉红色噪音则是特别针对说话声的遮蔽材料。粉红色噪音又被称做频率反比(1/f) 噪音,因为它的能量分布与频率成反比,或者说是每一个八度音程(Octave) 能量就衰退3 dB。 有色噪声: 1.粉红噪声。在给定频率范围内(不包含直流成分),随着频率的增加,其功率密度每倍频程下降3dB(密度与频率成反比)。每倍频的功率相同,但要产生每倍频程3dB的衰减非常困难,因此,没有纹波的粉红噪声在现实中很难找到。 2.红噪声(海洋学概念)。这是有关海洋环境的一种噪声,由于它是有选择地吸收较高的频率,因此称之为红噪声。 3.橙色噪声。该类噪声是准静态噪声,在整个连续频谱范围内,功率谱有限且零功率窄带信号数量也有限。这些零功率的窄带信号集中于任意相关音符系统的音符频率中心上。由于消除了所有的合音,这些剩余频谱就称为“橙色”音符。 4.蓝噪声。在有限频率范围内,功率密度随频率的增加每倍频增长3dB(密度正比于频率)。对于高频信号来说,它属于良性噪声。 5.紫噪声。在有限频率范围内,功率密度随频率的增加每倍频增长6dB(密度正比于频率的平方值)。 6.灰色噪声。该噪声在给定频率范围内,类似于心理声学上的等响度曲线(如反向的A-加权曲线),因此在所有频率点的噪声电平相同。
这几个概念的区别和联系:(转自:研学论坛) 白噪声,就是说功率谱为一常数;也就是说,其协方差函数在delay=0时不为0,在delay不等于0时值为零;换句话说,样本点互不相关。(条件: 零均值。) 所以,“白”与“不白”是和分布没有关系的。 当随机的从高斯分布中获取采样值时,采样点所组成的随机过程就是“高斯白噪声”; 同理,当随机的从均匀分布中获取采样值时,采样点所组成的随机过程就是“均匀白噪声”。 那么,是否有“非白的高斯”噪声呢?答案是肯定的,这就是”高斯色噪声“。这 种噪声其分布是高斯的,但是它的频谱不是一个常数,或者说,对高斯信号采样的时候不是随机采样的,而是按照某种规律来采样的。 仿真时经常采用高斯白噪声是因为实际系统(包括雷达和通信系统等大多数电子系统)中的主要噪声来源是热噪声,而热噪声是典型的高斯白噪声,高斯噪声下的理想系统都是线性系统。 相关讨论:
1、白噪声是指功率谱在整个频域内为常数的噪声,其付氏反变换是单位冲击函数的n倍(n取决于功率谱的大小),说明噪声自相关函数在t=0时不为零,其他时刻都为0,自相关性最强。高斯噪声是一种随机噪声,其幅度的统计规律服从高斯分布。高斯白噪声是幅度统计规律服从高斯分布而功率谱为常数的噪声如果在系统通带内功率谱为常数,成为带限白噪声“高斯”与“白”没有直接关系,有时人们还会提出高斯型噪声,这指的是噪声功率谱呈高斯分布函数的形状而已。 2、有一个问题我想提出来: 连续白噪声和离散白噪声序列的关系是什么?它们之间不应该是简单的采样 关系。因为连续白噪声的功率谱在整个频率轴上为常数,按照随机信号采样定理,对这样的信号采样,采样后的序列的功率谱必然发生混叠,而且混叠过后的功率谱是什么?应该是在整个频率轴上都为无穷大。这显然不满足离散白噪声序列的定义。 那离散白噪声序列跟连续白噪声有何关系?我觉得是对带限的连续白噪声进行采样后得到的,这个带限的连续白噪声信号的带宽刚好满足Nyquist抽样定理。这样采样过后的信号的功率谱就能满足定义了。 答:连续白噪声是离散白噪声在采样间隔趋近于零的极限。对带限的连续白噪声按照Nyquist采样定理进行采样就得到信息不损失的白噪声序列,当连续 白噪声的带宽趋近于无穷大时,采样率也趋近于无穷大(采样间隔趋近于零),此时不会发生频谱混叠。用极限的概念理解二者的关系就很清楚了。需要说明的是,任何实际系统都是工作于一定频带范围内的,带宽为无穷大的信号仅仅存 在于理论分析中,在实际系统中找不到。 3、对随机信号而言也有采样定理,这个采样定理是针对功率谱而言的。具 体的证明可以参看陆大金老师的随机过程教材。(清华的博士入学考试指定的参考教材) 4、对于不限带的白噪声,已经分析的比较清楚了。 而对于限带白噪声,我认为既然考虑采样定理,那么连续的限带白噪声可以 利用采样函数作为正交基的系数来表示,这些系数就是对应的噪声采样值,这个过程就是连续噪声的离散化过程,以上分析也是分析连续信道容量使用的方法。
数字图像中高斯噪声的消除
摘要 本文主要研究图像同时受到高斯噪声的滤除。实际图像在形成、传输的过程中,由于各种干扰因素的存在会受到噪声的污染,而且可能同时受到多种噪声的干扰,如脉冲噪声、高斯噪声、均匀噪声等。噪声,被理解为妨碍人的视觉器官或系统传感器对所接收图像源信息进行理解或分析的各种因素。对噪声的认识非常重要,它影响图像的输入、采集、处理的各个环节以及结果输出全过程,特别是图像的输入采集过程中,若输入中含有大量噪声,必然影响处理全过程及输出结果。图像再传输的过程中会受到高斯噪声的影响,使图像模糊。 本文概述了几种空域和频域滤波的基本原理。对低通滤波、维纳滤波中、值滤波和均值滤波四种去噪方法去除零均值不同标准差的高斯噪声叠加进了分析比较和仿真实现。最后结合理论分析和实验结果,讨论了一个完整去噪算法中影响去噪性能的各种因素。 关键字: 滤波MATLAB 高斯噪声低通滤波维纳滤波中值滤波 均值滤波
目录 摘要 (2) 数字图像中高斯噪声的消除 (1) 1噪声与图像 (1) 1.1噪声的概念 (1) 1.2常见的噪声及其对图像的影响 (1) 1.3 含噪模型 (1) 1.4常见的滤波器简介 (2) 1.5 高斯噪声模型 (2) 2图像质量的评价 (3) 2.1 主观评价 (3) 2.2 客观评价 (3) 3图像去噪原理 (5) 3.1低通滤波器 (5) 3.2维纳滤波器 (5) 3.3中值滤波器 (6) 3.4均值滤波器 (6) 4 用MATLAB程序处理 (6) 4.1 Matlab编程 (6) 4.2运行结果 (7) 5总结 (8) I
6参考文献 (9) 附录1 (10) II
高斯色噪声的产生实验报告一.实验要求 用SPW或者Matlab产生高斯色噪声,其功率谱满足高斯函数: 2 2 () 2 () c f f f S fσ - - = 其中,2000 c f Hz =,50 f Hz σ= 二.实验原理 首先通过实验1的正态分布随机数生成程序生成高斯白噪声,然后将该白噪声通过一个滤波器滤波,滤波器的频率响应满足上述的频谱特性,从而得到所需的色噪声。 三.仿真分析 频率(kHz) 功 率/ 频 率 ( d B / H z ) 高斯白噪声的功率谱 图1 高斯白噪声的验证 由于本实验需要首先生成高斯白噪声,因此做了高斯白噪声的验证。显然,从图1中,可以明显看出,生成的噪声的统计特性服从高斯分布,其功率谱服从均匀分布,因此得到的噪声是高斯白噪声。
-3 滤波器的幅频响应 幅度 频率(Hz ) 图2 滤波器的幅频响应 如图2所示,设计的滤波器的幅频响应满足高斯分布,其中心频率为2000Hz ,满足设计要求。 频率 (kHz) 功率/频率 (d B /H z ) 高斯色噪声的功率谱 -9 高斯色噪声的功率谱 功率/频率(W /H z ) 频率(Hz ) 图3 高斯色噪声的功率谱估计 将图1中所描述的高斯白噪声通过图2描述的滤波器进行滤波,从而得到了符合频率分布的高斯色噪声。图3采用两种功率谱估计的方法对得到的高斯色噪声进行了功率谱估计。显然,得到的色噪声的功率谱特性满足高斯高斯,说明得到的色噪声就是高斯色噪声,其功率谱满足高斯函数。 三.附录 本实验的程序如下: clear; clc; f_sample=8000; step =1; f_c=2000; segma_f=50; ff=0:step:f_sample; S_f = 1/( sqrt(2*pi)*segma_f) *exp(- (ff-f_c).^2/2/segma_f^2);
2020年高阶谱第6章非高斯有色噪声中的谐波恢复1精编版
第6章非高斯有色噪声中的谐波恢复问题(Ⅰ) 本章研究具有非对称分布的非高斯ARMA有色噪声中的谐波恢复问题。通过分析谐波信号和非高斯有色噪的三阶累积量特性,提出了基于二阶、三阶累积量的混合SVD-TLS方法(Second-and Third-order Cumulant-based Hybrid SVD-TLS,我们称作STCH-SVD-TIS)以及混合ESPRIT方法(STCH-ESPRIT)。即先由有噪观测过程的三阶累积量估计噪声模型AR部分参数,然后由AR多项式对有噪观测值进行预滤波,最后利用滤波输出过程的自相关函数并结合高分辨率谱估计方法(如SVD-TLS,ESPRIT)来估计谐波参数。本章还通过标准的仿真实验验证了这两种方法的有效性和高分辨率。 6.1 概述 我们知道,在现有的有色噪声中的谐波恢复方法中,主要有系统辨识方法(包括最大似然(ML)法、广义最小二乘(GLS)法和迭代逆滤波(ITIF)法、噪声模型假设(如MA噪声模型假设法和AR噪声模型假设法)以及四阶累积量法。综合考查上述各类方法,系统辨识方法和噪声模型假设法必须预知噪声的模型结构,然而至今不存在着任何可用于建立噪声模型的有效方法;同时,背景噪声必须为高斯噪声(MA噪声模型假设法和AR噪声模型假设法除外),因为只有在高斯假设下,上述方法的估计结果才能得到最小二乘估计。四阶累积量方法尽管不需要假定噪声模型,但它仅适用于高斯背景噪声情形,当然这也是该类方法的最大优点。由此可以得出这样一个结论:现有的有色噪声中的谐波恢复方法绝大多数都是在噪声的高斯假设下进行研究的。尽管MA噪声模型假设法也可用于非高斯噪声情形,但由于MA模型用于具有尖锐谱峰的噪声模型描述
这几个概念地区别和联系:(转自:研学论坛) 白噪声,就是说功率谱为一常数;也就是说,其协方差函数在时不为,在不等于时值为零;换句话说,样本点互不相关.(条件:零均值.) 所以,“白”与“不白”是和分布没有关系地. 当随机地从高斯分布中获取采样值时,采样点所组成地随机过程就是“高斯白噪声”; 同理,当随机地从均匀分布中获取采样值时,采样点所组成地随机过程就是“均匀白噪声”.那么,是否有“非白地高斯”噪声呢?答案是肯定地,这就是”高斯色噪声“.这种噪声其分布是高斯地,但是它地频谱不是一个常数,或者说,对高斯信号采样地时候不是随机采样地,而是按照某种规律来采样地. 仿真时经常采用高斯白噪声是因为实际系统(包括雷达和通信系统等大多数电子系统)中地主要噪声来源是热噪声,而热噪声是典型地高斯白噪声,高斯噪声下地理想系统都是线性系统. 相关讨论: 、白噪声是指功率谱在整个频域内为常数地噪声,其付氏反变换是单位冲击函数地倍(取决于功率谱地大小),说明噪声自相关函数在时不为零,其他时刻都为,自相关性最强.高斯噪声是一种随机噪声,其幅度地统计规律服从高斯分布.高斯白噪声是幅度统计规律服从高斯分布而功率谱为常数地噪声如果在系统通带内功率谱为常数,成为带限白噪声“高斯”与“白”没有直接关系,有时人们还会提出高斯型噪声,这指地是噪声功率谱呈高斯分布函数地形状而已. 、有一个问题我想提出来: 连续白噪声和离散白噪声序列地关系是什么?它们之间不应该是简单地采样关系.因为连续白噪声地功率谱在整个频率轴上为常数,按照随机信号采样定理,对这样地信号采样,采样后地序列地功率谱必然发生混叠,而且混叠过后地功率谱是什么?应该是在整个频率轴
波束空间MUSIC 的色噪声免疫性1 龚晓峰,董飞,徐友根,刘志文 北京理工大学信息科学与技术学院电子工程系,北京(100081) E-mail :mercury_gone@https://www.doczj.com/doc/c26344862.html, 摘 要:比较了高斯色噪声条件下阵元空间和波束空间波达方向估计二阶、四阶累积量多重信号分类法(MUSIC )的噪声敏感性能,定性研究了波束空间变换波瓣宽度对色噪声抑制性能的影响;还比较了非高斯色噪声条件下阵元空间和波束空间辅助阵元累积量MUSIC 的噪声免疫性。结果表明,波束空间方法在变换波瓣较窄的情况下可获得优于阵元空间方法的色噪声抑制性能。 关键词:阵列信号处理,波束空间,色噪声 中图分类号:TN911.7 1.引言 由于具有良好的谱分辨力和较小的计算量,子空间类算法已成为阵列信号波达方向(DOA )估计领域最常用和最经典的方法之一。这类算法常假定阵元噪声为空间白噪声,或为已知统计特性的色噪声。然而,实际中却经常存在未知统计特性色噪声的情况,此时,子空间类算法性能就会下降。 为了克服色噪声的影响,人们提出了基于阵列旋转和平移性质以及矩阵差分算法的色噪声抑制算法[1] ;文献[2]将阵列协方差矩阵分为Toeplitz 部分及非Toeplitz 部分,并采用矩阵变换的差分算法对消色噪声构造协方差矩阵;近二十年来,利用信号高阶累积量抑制高斯色噪声一度成为研究的热点 [3-5] ;对于非高斯色噪声,可通过在离主阵列较远的地方放置辅助 阵元,然后利用辅助阵元同主阵列噪声四阶累积量相互独立的性质进行噪声抑制[6] 。上述方法均在阵元空间进行,本文将研究波束空间[6]的色噪声抑制问题。 2.模型假设 2.1 阵元空间阵列输出模型 假定有N 个零均值非高斯窄带远场信号入射到阵元间距为d 的M 元均匀线阵,信号波长为λ,i θ为第i 个信号的入射角,1,2,...,i N =。阵元噪声为加性高斯噪声,且与信号互不相关。此时阵列输出()t x 由如下表示: 1 ()()()()()==+=+∑N i i i t s t t t t x a n As n (1) 其中1()[(),...,()]=T N t s t s t s 为信号矢量,()t n 为加性噪声矢量;1[,...,]=N A a a ,()θ=i i a a 11[1,(),...,()]θθ?=T i M i a a 为i θ方向信号导向矢量,()exp(2(1)sin /)m a j m d θπθλ=??。 该模型描述了阵列在各个阵元上的输出,我们称之为阵元空间阵列输出模型。 2.2 波束空间阵列输出模型 波束空间和阵元空间相对应,描述的是阵列输出在不同角度(波束)的分布。假设信号及阵列和上一节相同。通过波束形成矩阵M B C ×∈T (B 为波束数目)将阵列输出由阵元空间转换到波束空间,即波束空间阵列输出1()×∈B t C y 由下式描述: 1 本课题得到国家自然科学基金(No.60672084,No.60602037)的资助。
关于白噪声、高斯噪声和椒盐噪声 ●白噪声: 白噪声是指功率谱密度在整个频域内均匀分布的噪声。所有频率具有相同能量的随机噪声称为白噪声。白噪声或白杂讯,是一种功率频谱密度为常数的随机 信号或随机过程。换句话说,此信号在各个频段上的功率是一样的,由于白光 是由各种频率(颜色)的单色光混合而成,因而此信号的这种具有平坦功率谱 的性质被称作是“白色的”,此信号也因此被称作白噪声。相对的,其他不具 有这一性质的噪声信号被称为有色噪声。 而理想的白噪声具有无限带宽,因而其能量是无限大,这在现实世界是不可能 存在的。实际上,我们常常将有限带宽的平整讯号视为白噪音,因为这让我们 在数学分析上更加方便。然而,白噪声在数学处理上比较方便,因此它是系统 分析的有力工具。一般,只要一个噪声过程所具有的频谱宽度远远大于它所作 用系统的带宽,并且在该带宽中其频谱密度基本上可以作为常数来考虑,就可 以把它作为白噪声来处理。例如,热噪声和散弹噪声在很宽的频率范围内具有 均匀的功率谱密度,通常可以认为它们是白噪声。 ●高斯噪声: 顾名思义,高斯噪声就是n维分布都服从高斯分布的噪声。然后说一下什么是 高斯分布。高斯分布,也称正态分布,又称常态分布。对于随机变量X,其概 率密度函数如图所示。称其分布为高斯分布或正态分布,记为N(μ,σ2), 其中为分布的参数,分别为高斯分布的期望和方差。当有确定值时,p(x)也就 确定了,特别当μ=0,σ2=1时,X的分布为标准正态分布。 ●椒盐噪声: 椒盐噪声又称脉冲噪声,它随机改变一些像素值,是由图像传感器,传输信道,解码处理等产生的黑白相间的亮暗点噪声。椒盐噪声往往由图像切割引起。
通信原理报告 ————关于高斯噪声的讨论 班级:通信1班 学号: 120104030002 姓名:黄莉
引:什么是噪声? 噪声是最常见的退化因素之一,也是图像恢复中重点研究的内容,图像中的噪声可定义为图像中不希望有的部分。噪声是一种随机过程,它的波形和瞬时振幅以及相位都随时间无规则变化,因此无法精确测量,所以不能当做具体的处理对象,而只能用统计的理论和方法去处理。 一、高斯噪声 1、定义: 高斯噪声是一种随机噪声,n 维分布都服从高斯分布的噪声。 高斯分布,也称正态分布,又称常态分布。对于随机变量X ,其概率密度函数如图所示。称其分布为高斯分布或正态分布,记为N (a ,σ)。如图1所示: σ π21x a o () f x 图1 高斯分布图像 2、产生: 高斯噪声可以是大量独立的脉冲所产生的,从而在任何有限时间间隔内,这些脉冲中的每一个脉冲值与所有脉冲值的总和相比都可忽略不计。 高斯噪声完全由其时变平均值和两瞬时的协方差函数来确定,若噪声为平稳的,则平均值与时间无关,而协方差函数则变成仅和所考虑的两瞬时之差有关的相关函数,它在意义上等效于功率谱密度。 实际上热噪声、散弹噪声及量子噪声都是高斯噪声。 3、特点: 噪声影响图像处理的输入、采集、处理的各个环节以及输出结果的全过程,在图像中加高斯噪声通常会使图像变得模糊且会
出项细小的斑点,使得图像变得不清晰。 4、去除方法: 去除高斯噪声的方法有直方图变换,低通滤波,高通滤波,逆滤波,维纳滤波,中值滤波。 二、白噪声 1、定义: 功率谱密度在所有频率上均为常数的噪声,即 ——双边功率谱密度 或 ——单边功率谱密度 式中 n0 -正常数 白噪声的波形、频谱图如图2所示: 图2白噪声的波形、频谱图 2、白噪声的自相关函数: 对双边功率谱密度取傅里叶反变换,得到相关函数: 功率谱密度、自相关函数如图3所示:
2.7 高斯过程与白噪声 2.7.1 高斯过程 中心极限定理已证明:大量独立的、均匀微小的随机变量之和都近似地服从正态分布。 高斯过程定义:如果对于任意时刻),,2,1(n i t i =,随机过程的任意n 维随机变量),,2,1)((n i t X X i i ==服从高斯分布,则X(t)就是高斯过程。 高斯过程的n 维概率密度函数为: 2 )()(2 12 21211) 2(1),,,;,,,(m x C m x n n n T e C t t t x x x f --- -= π 式中m,x 为n 维向量 ????? ? ??????=???? ? ???????=????????????=n n n x x x x t m t m t m t X E t X E t X E m 212121)()()()]([)]([)]([ C 为协方差矩阵: ???? ? ? ? ???? ??? =),(),(),() ,(),(),(1 212111n n X n X n X X n X X t t C t t C t t C t t C t t C t t C C 由此可见,正态随机过程的n 维概率分布仅取决于其一、二阶矩函数。 广义平稳正态过程定义:若正态随机过程X(t)的均值和方差都是与时间无关的常数,即2)]([, )]([X X t X D m t X E σ==;而自相关函数只取决于时间间隔τ, n k i t t R t t R i k i k i k X k i X ,,2,1,;,)(),( =-==--ττ,则称此正态过程为广义平稳正态 过程。 高斯过程有许多特殊性质: 性质1:宽平稳高斯过程一定是严平稳过程。 性质2:若平稳高斯过程在任意两个不同时刻j i t t ,是不相关的,那么也一定是互