
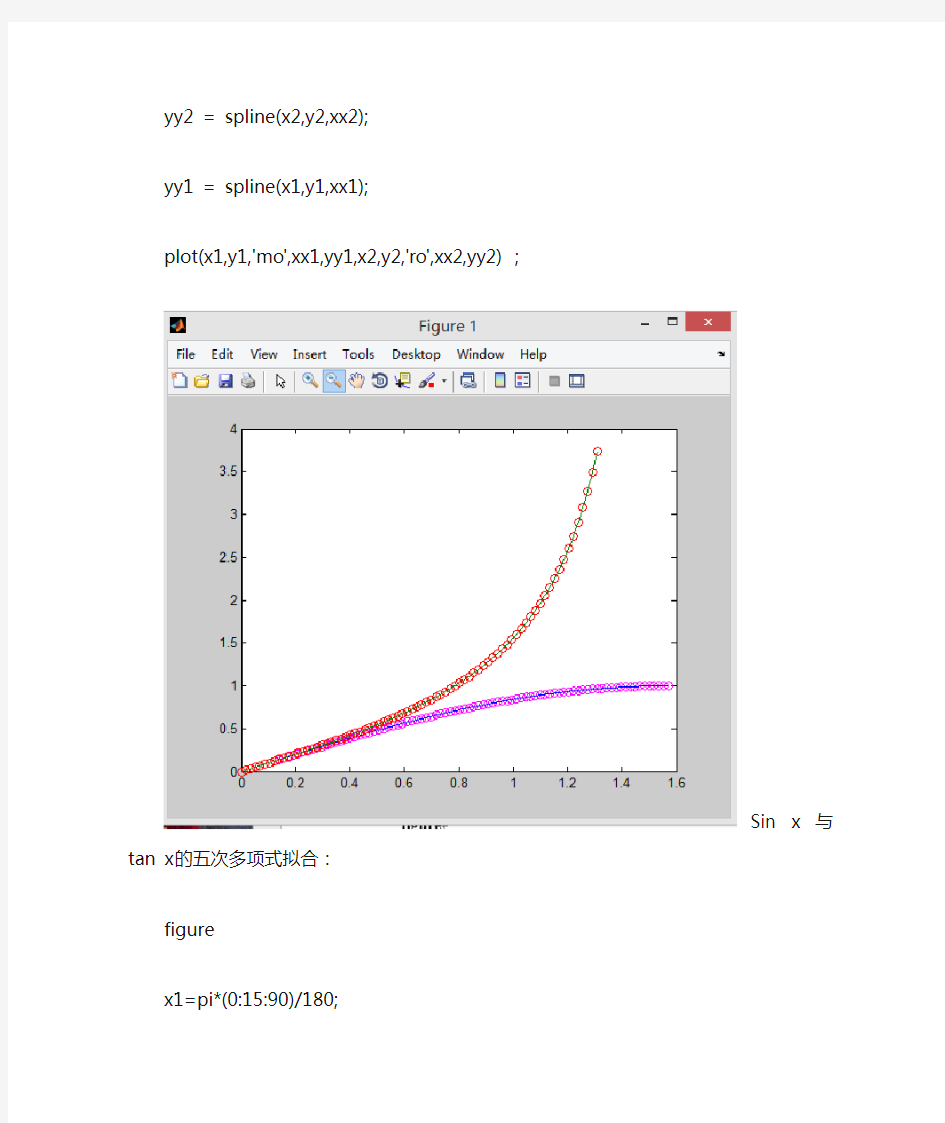
1. 表1 用三次样条方法插值计算0-90 度内整数点的sin 值和0-75 度内整数点的正切值,然后用5 次多项式拟合方法计算相同的函数。
a(度)0 15 30 45 60 75 90
Sin(a)0 0.2588 0.5000 0.7071 0.8660 0.9659 1.0000
tan(a)0 0.2679 0.5774 1.0000 1.7320 3.732
解:分别对应的程序如下:
Sin x函数和tan x函数:
x1= pi*(0:90)/180;
y1 = sin(x1);
xx1 = pi*(0:.25:90)/180;
x2 = pi*(0:75)/180;
y2 = tan(x2);
xx2 = pi*(0:.25:75)/180;
yy2 = spline(x2,y2,xx2);
yy1 = spline(x1,y1,xx1);
plot(x1,y1,'mo',xx1,yy1,x2,y2,'ro',xx2,yy2);
Sin x与tan x的五次多项式拟合:
figure
x1=pi*(0:15:90)/180;
y1=[0,0.2588,0.5,0.7071,0.866,0.9659,1.0];
x2=pi*(0:15:75)/180;
y2=[0,0.2679,0.5774,1,1.732,3.732];
xx1=pi*(1:90)/180;
pp1=polyfit(x1,y1,5);
yy1=polyval(pp1,xx1);
xx2=pi*(1:75)/180;
pp2=polyfit(x2,y2,5);
yy2=polyval(pp2,xx2);
plot(x1,y1,'-mo',xx1,yy1,x2,y2,'-ro',xx2,yy2);
legend('描点显示','五次拟合')
2. 采用最近点法、线性法和3 次样条法插值计算1-100 整数间平方根
n 1 4 9 16 25 36 49 64 81 100
Sqtr(n)1 2 3 4 5 6 7 8 9 10
解:程序如下:
x=[1,4,9,16,25,36,49,64,81,100];y=x.^0.5;
xx=0:100;
subplot(1,3,1);
y1=interp1(x,y,xx,'nearest');
plot(x,y,'-*',xx,y2,'xr');
title('最近点法')
subplot(1,3,2);
y2=interp1(x,y,xx);
plot(x,y,'-*',xx,yy,'rx');
title('线性法');
subplot(1,3,3);
y3=interp1(x,y,xx,'spline');
plot(x,y,'-*',xx,y3,'xr');
title('3次样条法');
仿真的结果:
3. 已知p(x)=2x^4-3x^3+5x+13,求p(x)的全部根,由方程p(x)=0 的根构造
一个多项式f(x),并和p(x)比较。
解:
程序如下:
P=[2,-3,0,5,13];
K=roots(P);
P=poly(K);
F=poly2str(P,'x');
4. 有两个多项式p(x)=2x^4-3x^3+5x+13;q(x)=x^2+5x+8, 求p(x),p(x)q(x) 和
p(x)/q(x)的导数。
解:对应的程序如下:
P=[2,-3,0,5,13];
Q=[1,5,8];
format rat
K1=polyder(P);
K2=polyder(P,Q);
[p,q]=polyder(P,Q);
p=poly2str(p,'x');
q=poly2str(q,'x');
D1=poly2str(K1,'x');
D2=poly2str(K2,'x');
D3=poly2str([p,q],'x')
运行的结果如下:
D1 =
8 x^3 - 9 x^2 + 5
D2 =
12 x^5 + 35 x^4 + 4 x^3 - 57 x^2 + 76 x + 105
x^82 + x^81 + x^80 + 4 x^79 + x^78 + x x^77 + ^ x^76 + 5 x^75 + x^74 + + x^73 + x^72 + 2 x^71 + 7 x^70 + x^69 + x x^68 + ^ x^67 + 4 x^66 + x^65 + + x^64 + x^63 + 3 x^62 + 4 x^61 + x^60 + x x^59 + ^ x^58 + 3 x^57 + x^56 + - x^55 + x^54+ 7 x^53 + 7 x^52 + x^51 + x x^50 + ^ x^49 + 2 x^48 + x^47 + - x^46 + x^45 + 2 x^44 + 6 x^43 + x^42 + x x^41 + x^40+ - x^39 + x^38 + 2 x^37 + 5 x^36 + x^35 + x^34 + x^33+ x x^32 + ^ x^31 + 4 x^30 + x^29 + + x^28 + x^27 + 1 x^26+ 0 x^25 + x^24 + x x^23 + ^ x^22 + 3 x^21 + x^20 + + x^19 + x^18 + 4 x^17 + 1 x^16 + x^15 + x x^14 + ^ x^13 + 2 x^12+ x^11 + + x^10 + x^9 + 8 x^8 + 0 x^7 + x^6 + x x^5 + x^4 + x^3 + x^2 + 6 x + 4
5. 求解恰定方程组,采用左除法、求逆法、lu 和qr 分解法
2x+3y+5z=10
3x+7y+4z=3
x-7y+z=5
程序如下:
A=[2,3,5;3,7,4;1,-7,1];
b=[10;3;5];
X1=A\B;%左除法
rank(A)
x=A\b;
X2=inv(A)*b;%求逆法
[L,U]=lu(A)
X3=U\(L\b);%LU分解法
[Q,R]=qr(A)
X4=R\(Q\b);%QR分解法
[X1 X2 X3 X4]
相应的仿真的结果如下:
ans =
3
L =
2/3 5/28 1
1 0 0
1/3 1 0
U =
3 7 4
0 -28/3 -1/3
0 0 67/28
Q =
-929/1738 -124/7687 -169/200
-809/1009 -373/1217 610/1189
-929/3476 493/518 169/1120
-3476/929 -4645/869 -3596/585
0 -7687/868 -247/696
0 0 -1749/865
ans =
-121/67 -121/67 -121/67 -121/67
-36/67 -36/67 -36/67 -36/67
204/67 204/67 204/67 204/67 6.求解超定方程组,采用采用左除法、求逆法和最小二乘法
2x-4y+10z=22
6x+5y-4z=32
5x-y+33z=10
x+4y-76z=33
对应的程序如下:
A=[2,-4,10;6,5,-4;5,-1,33;1,4,-76];
b=[22;32;10;33];
X1=A\b;%左除法
X2=pinv(A)*b;%求逆法
X3=lsqnonneg(A,b);%最小二乘法
[X1 X2 X3]
运行的结果如下:
ans =
5340/851 5340/851 1410/331
-333/136 -333/136 2035/1129
-1103/2144 -1103/2144 0
程序如下:
X1=fzero('x^41+x^3+1',-1);
X2=fzero('x-sin(x)./x',0.5);
X3=fzero('3*x+sin(x)-exp(x)',1.5);
[X1 X2 X3]
结果如下:
ans =
-441/463 889/1014 1289/682
(1)的M文件如下:
function q=g(p)
x=p(1);
y=p(2);
q(1)=x^2+y^2-9;
q(2)=x+y-1;
end
运行结果如下:
x=fsolve('g',[3,0],optimset('Display','off'))
x =
1519/593 -926/593
(2)M文件如下:
function q=t(p)
x=p(1);
y=p(2);
z=p(3);
q(1)=sin(x)+y^2+log(z)-7;
q(2)=3*x+2.^y-z^3+1;
q(3)=x+y+z-5;
end
再输入:
x=fsolve('t',[1,1,1]',optimset('Display','off'))
运行结果如下:
x=fsolve('t',[1,1,1]',optimset('Display','off'))
x =
1013/1691
1531/639
1999/997
(1)建立函数:
function yp=fun2(t,y) %建立相应的函数yp=-(1.2+sin(10.*t)).*y;
end
再在命令窗口输入:
[t,y]=ode23('fun2',[0,5],1);
[t,y]
得倒最后的结果为:
ans =
0 1
1/15 384/425
254/1847 801/1024
265/1323 305/447
176/653 873/1459
675/1913 598/1107
2197/5037 1212/2339
1075/2136 529/1036
363/641 523/1051
1717/2696 643/1381
1086/1571 577/1348
173/232 494/1285
3277/4055 463/1380
921/1054 588/2003
773/806 404/1557
1597/1554 767/3106
649/592 453/1871
8736/7531 902/3787
1205/984 117/511
972/743 83/404
5579/4068 267/1468
1548/1079 197/1243
10403/6935 514/3707
1082/683 239/1951
1253/758 1818/15625
842/489 251/2202
864/467 1346/12463 3035/1571 121/1242 848/425 271/3137 1929/937 267/3547 1306/615 505/7671 419/190 147/2530 14989/6590 181/3295 75/32 629/11712 2396/995 253/4783 220/89 180/3523 1553/609 132/2833 1605/614 103/2484 1347/503 71/1965 1604/585 589/18652 1841/653 144/5177 1066/367 241/9332 659/222 213/8422 2535/836 211/8466 1517/490 141/5845 682/215 187/8447 2204/681 269/13622 1789/542 47/2731 3011/895 143/9511 1479/430 83/6274 1671/473 47/3867 6578/1829 58/4873 948/259 151/12873 1672/449 623/54863 4632/1219 127/12180 313/81 63/6772 20291/5165 147/18131 1002/251 136/19201 1151/283 74/11875 1971/476 31/5357 3342/793 94/16745 6664/1557 11/1988 1025/236 71/13203 2336/529 43/8611 1667/372 49/10946 2396/527 59/15116 4024/873 152/44605 1821/389 50/16707 2307/485 109/39677
1504/307 98/37549
6401/1290 119/46743
5 43/17387
最终t=5,y=43/17387
(2)
函数如下:
function dy=f(t,y)
dy=zeros(2,1);
dy(1)=dy(2);
dy(2)=(2-2.*t.*dy(1)-3.*y(1))./(1+t.^2);
end
再在命令窗口输入:
[t,y]=ode23(@f,[0 5],[0 1]);
[t,y]
显示的结果为:
ans =
0 0 1
1/25 0 1013/938
628/2753 0 197/136
593/1334 0 775/422
1117/1519 0 1617/713
1265/1024 0 987/355
2749/1667 0 537/176
3607/1699 0 2286/701
661/252 0 4495/1317
787/252 0 4043/1148
913/252 0 4637/1287
1039/252 0 2489/679
1165/252 0 2991/805
5 0 1169/312
函数:
function f=fe(x)
f=1./((x-0.3).^2+0.01)-1./((x-0.9).^2+0.04)-6; end
再输入:K=quad('fe',0,1)
得到如下结果:
K=quad('fe',0,1)
K =
2071/177
function f=h(t)%创建一个新函数
f=sqrt(cos(t.*t)+4*sin((2.*t).^2)+1);%函数的表达式end
L=quad('h',0,2*pi)
得到如下结果:
L =
1727/254 + 2169/688i
I=dblquad(inline('exp(-(x.^2+y.^2))'),0,1,0,1)
ans =
[ exp(-x^2), exp(- x^2 - 1)] [ exp(-x^2), exp(- x^2 - 656572985400717/562949953421312)] [ exp(-x^2), exp(- x^2 - 4724815845900333/2251799813685248)] [ exp(-x^2), exp(- x^2 - 3797331908937345/1125899906842624)] [ exp(-x^2), exp(- x^2 - 5790827928841923/1125899906842624)] [ exp(-x^2), exp(- x^2 - 8703180435085163/1125899906842624)] [ exp(-x^2), exp(- x^2 - 5240745460316911/562949953421312)] [ exp(-x^2), exp(- x^2 - 5986678173366717/562949953421312)] [ exp(-x^2), exp(- x^2 - 6557792247434309/562949953421312)] [ exp(-x^2), exp(- x^2 - 6982220510128021/562949953421312)] [ exp(-x^2), exp(- x^2 - 456737675528067/35184372088832)] [ exp(-x^2), exp(- x^2 - 3782248212824127/281474976710656)] [ exp(-x^2), exp(- x^2 - 3885804256400125/281474976710656)] [ exp(-x^2), exp(- x^2 - 1975736635284715/140737488355328)] I =
198/355
I=dblquad(inline('cos(x+yI)'),0,pi,0,pi)
I =
-4
电气学科大类 Modern Control Systems Analysis and Design Using Matlab and Simulink Title: Automobile Velocity Control Name: 巫宇智 Student ID: U200811997 Class:电气0811
电气0811 巫宇智 Catalogue Preface (3) The Design Introduction (4) Relative Knowledge (5) Design and Analyze (6) Compare and Conclusion (19) After design (20) Appendix (22) Reference (22)
Automobile Velocity Control 1.Preface: With the high pace of human civilization development, the car has been a common tools for people. However, some problems also arise in such tendency. Among many problems, the velocity control seems to a significant challenge. In a automated highway system, using the velocity control system to maintain the speed of the car can effectively reduce the potential danger of driving a car and also will bring much convenience to drivers. This article aims at the discussion about velocity control system and the compensator to ameliorate the preference of the plant, thus meets the complicated demands from people. The discussion is based on the simulation of MATLAB. Key word: PI controller, root locus
基于MATLAB的电机学计算机辅助分析与仿真 实验报告 班级: 学号: 姓名: 完成时间:
一、实验内容 1.1单相变压器不同负载性质的相量图 通过MATLAB 画出单相变压器带感性,阻性,容性三种不同性质负载的变压器向量图 1.2感应电机的S T -曲线 通过MATLAB 画出三相感应电动机的转矩转差率曲线 二、实验要求 2.1单相变压器不同负载性质的相量图 根据给定的仿真实例画出负载相位角30,0,302-=j 三种情况下得向量图,观察电压大小与相位的关系,了解总结负载性质不同对向量图的影响 2.2感应电机的S T -曲线 根据给定的实例,画出3.1~3.1-=s 的S T -曲线,了解感应电机临界转差率的大小和稳定工作区间的大小,给出定性分析 三、实验方法 3.1单相变压器不同负载性质的相量图 1.单相变压器不同负载性质的相量图 (1)先画出负载电压'2U 的相量; (2)根据负载的性质和阻抗角画出二次电流(规算值)的相量 (3)在2U 上加上一个与电流方向相同的压降,其大小为二次电流规算值'2I 与二次漏电阻规算值'2R 之积;再加上一个超前电流方向?90的压降,其大小为二次电流'2I 规算值与二次漏电抗规算值'2χ之积; (4)根据上一步结果连线,得出'2E ; (5)超前'2E 方向?90画出m Φ; (6)根据励磁电阻与电抗的大小得出励磁阻抗角,并超前m Φ一个励磁阻抗角的大小得出m I 的方向; (7)根据平行四边形法则,做出'2I -与m I 的和,即为1I ; (8)根据'21E E =得出1E ,并得出1E -。
(9)在1E -上加上一个与电流方向相同的压降,其大小为一次电流1I 与一次漏电阻1R 之积;再加上一个超前电流方向?90的压降,其大小为一次电流1I 与一次漏电抗1χ之积; (10) 根据上一步结果连线,得出1U ; 3.2感应电机的S T -曲线 实验采用matlab 对转矩转差率曲线进行仿真。 由转矩转差率关系公式知, 2212 2122 1)()(x c x s r c r s r U m T s s +++?Ω= 只有s 为自变量,其他参数均为已知。 编程时,先取s 在0.01-1.3正区间的S T -,进行绘图;再取相应负区间对S T -绘图;最后加入(0,0) 四、实验源程序(1分) 4.1单相变压器不同负载性质的相量图 见附录 4.2感应电机的T-S 曲线 %T-S 曲线绘制 %定义常量 R2 = 0.04; R1 = 0.06; M1 = 3; U1 = 380; W = 2*pi*1485/60; X1 = 0.27; X2 = 0.56; C = 1+X1/16.4; %画出s=0.01~1.3的T-S 曲线 s = 0.01:0.01:1.3; T=ones(1,length(s));
MATLAB仿真 期末大作业 姓名:班级:学号:指导教师:
2012春期末大作业 题目:设单位负反馈控制系统前向通道传递函数由)()(21s G s G 和串联,其中: ) 1(1)()(21++==s A s G s K s G A 表示自己学号最后一位数(可以是零),K 为开环增益。要求: (1)设K=1时,建立控制系统模型,并绘制阶跃响应曲线(用红色虚线,并标注坐标和标题);求取时域性能指标,包括上升时间、超调量、调节时间、峰值时间; (2)在第(1)问中,如果是在命令窗口绘制阶跃响应曲线,用in1或者from workspace 模块将命令窗口的阶跃响应数据导入Simulink 模型窗口,用示波器显示阶跃响应曲线;如果是在Simulink 模型窗口绘制阶跃响应曲线,用out1或者to workspace 模块将Simulink 模型窗口的阶跃响应数据导入命令窗口并绘制阶跃响应曲线。 (3)用编程法或者rltool 法设计串联超前校正网络,要求系统在单位斜坡输入信号作用时,速度误差系数小于等于0.1rad ,开环系统截止频率s rad c /4.4''≥ω,相角裕度大于等于45度,幅值裕度大于等于10dB 。
仿真结果及分析: (1)、(2)、将Simulink模型窗口的阶跃响应数据导入命令窗口并绘制阶跃响应曲线 通过在Matlab中输入命令: >> plot(tout,yout,'r*-') >> title('阶跃响应曲线') 即可得出系统阶跃响应曲线,如下: 求取该控制系统的常用性能指标:超调量、上升时间、调节时间、峰值时间的程序如下: G=zpk([],[0,-1],5)。 S=feedback(G,1)。
春季学期MATLAB期末作业 学院:机电工程学院 专业:机械制造设计及其自动化 学号: 班号: 姓名:
2013年春季学期 MATLAB 课程考查题 姓名: 学号: 学院:机电学院 专业:机械制造 一、必答题: 1.matlab常见的数据类型有哪些?各有什么特点? 常量:具体不变的数字 变量:会根据已知条件变化的数字 字符串:由单引号括起来的简单文本 复数:含有复数的数据 2.MATLAB中有几种帮助的途径? (1)帮助浏览器:选择view菜单中的Help菜单项或选择Help菜单中的MATLAB Help菜单项可以打开帮助浏览器; (2)help命令:在命令窗口键入“help”命令可以列出帮助主题,键入“help 函数名”可以得到指定函数的在线帮助信息; (3)lookfor命令:在命令窗口键入“lookfor 关键词”可以搜索出一系列与给定关键词相关的命令和函数 (4)模糊查询:输入命令的前几个字母,然后按Tab键,就可以列出所有以这几个字母开始的命令和函数。 注意:lookfor和模糊查询查到的不是详细信息,通常还需要在确定了具体函数名称后用help命令显示详细信息。 3.Matlab常见的哪三种程序控制结构及包括的相应的语句? 1.顺序结构:数据输入A=input(提示信息,选项) 数据输出disp(X) 数据输出fprintf(fid,format,variables) 暂停pause 或pause(n) 2.选择结构: If语句: if expression (条件) statements1(语句组1) else statements2(语句组2)
建议收藏下载本文,以便随时学习! 春季学期MATLAB期末作业 学院:机电工程学院 专业:机械制造设计及其自动化 学号: 班号: 姓名: 我去人也就有人!为UR扼腕入站内信不存在向你偶同意调剖沙
2013年春季学期 MATLAB 课程考查题 姓名: 学号: 学院: 机电学院 专业: 机械制造 一、 必答题:1.matlab 常见的数据类型有哪些?各有什么特点? 常量:具体不变的数字 变量:会根据已知条件变化的数字 字符串:由单引号括起来的简单文本 复数:含有复数的数据 2.MATLAB 中有几种帮助的途径? (1)帮助浏览器:选择view 菜单中的Help 菜单项或选择Help 菜单中的 MATLAB Help 菜单项可以打开帮助浏览器; (2)help 命令:在命令窗口键入“help” 命令可以列出帮助主题,键入 “help 函数名”可以得到指定函数的在线帮助信息; (3)lookfor 命令:在命令窗口键入“lookfor 关键词”可以搜索出一系列 与给定关键词相关的命令和函数 (4)模糊查询:输入命令的前几个字母,然后按Tab 键,就可以列出所有以 这几个字母开始的命令和函数。 注意:lookfor 和模糊查询查到的不是详细信息,通常还需要在确定了具体 函数名称后用help 命令显示详细信息。 3.Matlab 常见的哪三种程序控制结构及包括的相应的语句? 1.顺序结构:数据输入A=input(提示信息,选项) 数据输出disp(X) 数据输出fprintf(fid,format,variables) 暂停pause 或 pause(n) 2.选择结构: If 语句: if expression (条件) statements1(语句组1) else statements2(语句组2)建议收藏下载本文,以便随时学习!我去人也就有人!为UR扼腕入站内信不存在向你偶同意调剖沙
期末大作业报告 课程名称:数字图像处理 设计题目:车牌识别 学院:信息工程与自动化学院 专业:计算机科学与技术 年级:xxxxx 学生姓名:xxxxxxx(学号xxxxxxxxxxxxx) 指导教师:xxxx 日期:20XX.6.10 教务处制 车牌识别 摘要:数字图像处理技术是20世纪60年代发展起来的一门新兴学科,随着图像处理理论和方法的进一步完善,使得数字图像处理技术在各个领域得到了广泛应用,并显示出广阔的应用前景。MATLAB既是一种直观、高效的计算机语言,同时又是一个科学计算平台。它为数据分析和数据可视化、算法和应用程序开发提供了最核心的数学和高级图形工具。根据它提供的500多个数学和工程函数,工程技术人员和科学工作者可以在它的集成环境中交互或编程以完成各自的计算。MATLAB中集成了功能强大的图像处理工具箱。由于MA TLAB语言的语法特征与C语言极为相似,而且更加简单,更加符合科技人员对数学表达式的书写格式,而且这种语言可移植性好、可扩展性强,再加上其中有丰富的图像处理函数,所以MA TLAB在图像处理的应用中具有很大的优势。车牌识别技术是智能交通系统的重要组成部分,在近年来得到了很大的发展。本文从预处理、边缘检测、车牌定位、字符分割、字符识别五个方面,具体介绍了车牌自动识别的原理。并用MATLAB软件编程来实现每一个部分,最后识别出汽车牌照。 关键词:车牌识别、数字图像处理、MATLAB
一、设计原理 车辆牌照识别系统的基本工作原理为:将摄像头拍摄到的包含车辆牌照的图像通过视频卡输入到计算机中进行预处理,再由检索模块对牌照进行搜索、检测、定位,并分割出包含牌照字符的矩形区域,然后对牌照字符进行二值化并将其分割为单个字符,然后输入JPEG或BMP 格式的数字,输出则为车牌号码的数字。牌照自动识别是一项利用车辆的动态视频或静态图像进行牌照号码、牌照颜色自动识别的模式识别技术。其硬件基础一般包括触发设备、摄像设备、照明设备、图像采集设备、识别车牌号码的处理机等,其软件核心包括车牌定位算法、车牌字符分割算法和光学字符识别算法等。某些牌照识别系统还具有通过视频图像判断车辆驶入视野的功能称之为视频车辆检测。一个完整的牌照识别系统应包括车辆检测、图像采集、牌照识别等几部分。当车辆检测部分检测到车辆到达时触发图像采集单元,采集当前的视频图像。牌照识别单元对图像进行处理,定位出牌照位置,再将牌照中的字符分割出来进行识别,然后组成牌照号码输出。 二、设计步骤 1. 提出总体设计方案: (1)车牌图像预处理方法 因为车牌图像都是在室外拍摄的,所以不可避免地会受到光照、气候等因素的影响,而且拍摄者的手部抖动与车辆的移动会造成图像的模糊。要去除这些干扰就得先对车牌图像进行预处理。由于当前数码相机的像素较高,原始图像的数据一般比较大,输入的彩色图像包含大量颜色信息,会占用较多的存储空间,且处理时也会降低系统的执行速度。因此对图像进行识别等处理时,常将彩色图像转换为灰度图像,以加快处理速度。对图像进行灰度化处理后常用的方法是图像二值化、去除背景图像、增强处理、边缘检测、滤波等处理等。
杭州电子科技大学信息工程学院《科学计算与MATLAB》期末大作业
给出程序、图、作业分析,程序需加注释。 1. 试编写名为fun.m 的MATLAB 函数,用以计算下述的值: ?? ? ??-<->=t t n t t t n t f 的)4/sin()(si 对所有)4/sin(其他情况)sin(的)4/sin()(si 对所有)4/sin()(ππππ 绘制t 关于函数f(t)的图形,其中t 的取值范围为ππ66≤≤-t ,间距为10/π。 function y=fun()%定义函数 % t=-6*pi:pi/10:6*pi; %定义变量范围 y = (sin(pi/4)).*(sin(t)>sin(pi/4))+(sin(-pi/4)).*(sin(t)
2.解以下线性方程组 ??? ??=+=++=--3 530 42231 321321x x x x x x x x A=[2 -1 -1;1 1 4;3 0 5];%输入矩阵 B=[2;0;3]; %输入矩阵 X = A\B %计算结果 3.已知矩阵? ? ??? ???? ???=44434241 3433323124232221 14131211A 求: (1)A(2:3,2:3) (2)A(:,1:2) (3)A(2:3,[1,3]) (4)[A,[ones(2,2);eye(2)]]
A=[11 12 13 14;21 22 23 24;31 32 33 34;41 42 43 44];%输入矩阵A(2:3,2:3) %输出矩阵 A(:,1:2) %输出矩阵 A(2:3,[1,3]) %输出矩阵 [A,[ones(2,2);eye(2)]] %输出矩阵
H a r b i n I n s t i t u t e o f T e c h n o l o g y 材料力学上机作业 课程名称:材料力学 设计题目:应力状态分析 院系:机电学院 班级: 分析者: 学号: 指导教师:张桂莲 设计时间:2013年6月18日 哈尔滨工业大学
材料力学上机课设计说明书 一, 设计题目 题目7 应力状态分析 输入: 1. 平面应力状态输入: x y xy σστ(,,);某截面方位角α 2. 空间应力状态输入: ,x y z xy yz zx σσστττ(,,,,) 输出: 1. 输出主应力123σσσ(,,) 2. 最大切应力(13 max 132 σσττ-== ) 3. 如为平面应力状态则需要输出方位角α斜截面上的应力αα στ、及主方向角*σα 4. 画出应力圆示意图 二, 程序计算设计过程 1. 平面应力状态分析 对于任意平面应力状态,有 max min σσ = 2x y σσ+± 主应力为: 1max 23min ,0,σσσσσ=== 并且由 2tan 2xy x y στασσ=- 可求得主应力方向角 1 3 σσ αα、。 对于任意一个方位角α,有: = cos 2sin 222 sin 2cos 22 x y x y xy x y xy αασσσσσατα σστατα +++ +-=- +
从而,输入任意角α,即可求得该截面的应力状态 ααστ、 并且 ααστ、都是关于α的函数,上式即为应力圆的参数方程,参数为α。 将α从0到pi 取一系列的值,则可以求出一系列的ααστ、,在坐标系中找 到对应点,连接即可作出应力圆。 2. 三向应力状态分析 解特征方程 32 1230I I I σσσ-+-= 即可求出主应力123σσσ、、 其中: 123|||||||| x y z x yx y zy z xz xy y yz z zx x x yx zx xy y zy xz yz z I I I σσσστστσττστστσστττστττσ=-+??????=++ ? ? ? ???????? ?= ? ??? 再由 13 max 132 σσττ-== 可求得最大切应力。 求解三向应力圆: 三个圆121323C 、C 、C 的圆心分别为: 231312122313,0,0,0222C C C σσσσσσ+++?????? ? ? ??????? 、、 半径非别为: 23 13 12 122313r = ,r = ,r = 2 2 2 σσσσσσ--- 由此可以求出三个应力圆的方程,从而作出三向应力圆。 三, 程序代码 reg=input('选择应力状态方式(1或2):');%1表示平面应力状态,2表示空间应力状态 if reg==1 %选择平面应力状态分析 %输入已知量,应力单位为MPa ,转角单位为rad
MATLAB应用技术 期末大作业 专业: 姓名: 学号: 分数
一、在一个图形窗口中以子图形式同时绘制正弦、余弦、正切、余切曲线。请写下完整代码,展示图形结果。(请标注题图和坐标轴,用不同颜色和不同线型分别绘制以上曲线)。(15分) 二、某公司员工的工资计算方法如下。 (1)工作时数超过120小时者,超过部分加发15%。 (2)工作时数低于60小时者,扣发700元。 (3)其余按每小时84元发。 根据员工的工时数,计算应发工资。请写下完整的程序代码,并任意输入一工时数(使用input 函数),将结果展示(使用disp 函数)利用该代码进行计算工资,请写下计算结果。(15分) 三、编写一个函数文件,使其能够产生如下的分段函数: ?? ? ??≥<<≤-=66225.0,25.05.15.0)(x x x x x x f 请编写完整的函数文件(保存函数文件名为hanshu.m ),并编写脚本文件代码,任意输入x 值(使用input 函数),在脚本文件中调用函数文件求)(x f ,展示结果(使用disp 函数),请写下计算结果。(15分) 四、将5个学生的6门功课的成绩存入矩阵P 中,进行如下处理: (1)分别求每门课的最高分、最低分及相应学生的序号。 (2)分别求每门课的平均分和标准差。 (3)5门课总分的最高分、最低分及相应学生序号。 (4)将5门课总分按从大到小顺序存入score 中,相应学生序号存入num 。 请将各小题的运行代码完整写下来,并写下运行结果。(20分) 五、请利用所学的MATLAB 知识,自主设计一个图形用户界面,请完整记录它的设计过程,需提供文字、代码和图片,以充分说明设计的图形用户界面可实现
2013年春季学期 《MATLAB语言及应用》课程试卷 姓名: 学号: 学院: 专业: 必答题 1.常用的matlab界面由哪些窗口组成,各有什么主要作用?(4分) (1)菜单和工具栏功能:【File】菜单主要用于对文件的处理。【Edit】菜单主 要用于复制、粘贴等操作,与一般Windows程序的类似,在此不作详细介绍。【Debug】菜单用于调试程序。【Desktop】菜单用于设置主窗口中需要打开的窗口。【Window】菜单列出当前所有打开的窗口。【Help】菜单用于选择打开不同的帮助系统。 (2)命令窗口功能:用于输入命令并显示除图形以外的所有执行结果 (3)历史命令窗口功能:主要用于记录所有执行过的命令 (4)当前工作目录窗口功能:对文件和目录进行操作 (5)工作空间窗口功能:查看、载入和保存变量 2.如何设置当前目录和搜索路径,在当前目录上的文件和在搜索路径上的文件有什么 区别?(2分) 方法一:在MATLAB命令窗口中输入editpath或pathtool命令或通过【File】/|【SetPath】菜单,进入“设置搜索路径”对话框,通过该对话框编辑搜索路径。 方法二:在命令窗口执行“path(path,…D:\Study ?)”,然后通过“设置搜索路径”对话查看“D:\Study”是否在搜索路径中。 方法三:在命令窗口执行“addpath D:\Study- end”,将新的目录加到整个搜索路径的末尾。如果将end改为begin,可以将新的目录加到整个搜索路径的开始。 区别:当前文件目录是正在运行的文件的目录,显示文件及文件夹的详细信息,且只有将文件设置为当前目录才能直接调用。搜索路径中的文件可以来自多个 不同目录,在调用时不用将其都设置为当前目录,为同时调用多个文件提供 方便。 3.有几种建立矩阵的方法?各有什么优点?(4分) 1.在命令窗口中直接输入优点:适合输入不规则和较小的矩阵 2.通过语句和函数生成矩阵优点:适合输入规则且较大的矩阵 3.通过M文件来建立矩阵,从外部数据文件中导入矩阵 优点:方便创建和导入大型矩阵 4.说明break语句、continue语句和return语句的用法。(3分)
m a t l a b综合大作业(附详细 答案) 标准化文件发布号:(9312-EUATWW-MWUB-WUNN-INNUL-DQQTY-
《MATLAB语言及应用》期末大作业报告1.数组的创建和访问(20分,每小题2分): 1)利用randn函数生成均值为1,方差为4的5*5矩阵A;实验程序:A=1+sqrt(4)*randn(5) 实验结果: A = 2)将矩阵A按列拉长得到矩阵B; 实验程序:B=A(:) 实验结果: B =
3)提取矩阵A的第2行、第3行、第2列和第4列元素组成2*2的 矩阵C; 实验程序:C=[A(2,2),A(2,4);A(3,2),A(3,4)] 实验结果: C = 4)寻找矩阵A中大于0的元素;] 实验程序:G=A(find(A>0)) 实验结果: G = 5)求矩阵A的转置矩阵D; 实验程序:D=A' 实验结果: D = 6)对矩阵A进行上下对称交换后进行左右对称交换得到矩阵E; 实验程序:E=flipud(fliplr(A)) 实验结果: E =
7)删除矩阵A的第2列和第4列得到矩阵F; 实验程序:F=A; F(:,[2,4])=[] 实验结果: F = 8)求矩阵A的特征值和特征向量; 实验程序:[Av,Ad]=eig(A) 实验结果: 特征向量Av = + - + - - + + - 特征值Ad = 0 0 0 0 0 + 0 0 0 0 0 - 0 0 0 0 0 0 0 0 0 0 9)求矩阵A的每一列的和值; 实验程序:lieSUM=sum(A) 实验结果: lieSUM = 10)求矩阵A的每一列的平均值; 实验程序:average=mean(A) 实验结果: average = 2.符号计算(10分,每小题5分): 1)求方程组20,0 uy vz w y z w ++=++=关于,y z的解; 实验程序:S = solve('u*y^2 + v*z+w=0', 'y+z+w=0','y,z'); y= S. y, z=S. z
Matlab在汽车振动分析中的应用 XXX (昆明理工大学交通工程学院,昆明650500) 摘要:在明确汽车振动的产生原因及其危害的基础上,对汽车振动进行了理论分析、MATLAB编程计算以及试验研究。结果表明:将MATLAB强大的数据处理和可视化技术应用于汽车振动分析与控制中,既可以验证理论分析的结果,又可以预测汽车响应,具有很高的实用价值。 关键字:MATLAB 汽车振动激励阻尼自由度 1 汽车振动的产生原因及其危害 机械振动是一种特殊形式的运动,激励、质量、弹性和阻尼是振动系统的四大要素。如果把汽车作为一个系统来研究,汽车本身就是一个具有质量、弹簧和阻尼的振动系统。由于汽车内部各部分的固有频率不同,汽车在行驶中常因路面不平、车速和运动方向的变化,车轮、发动机和传动系统的不平衡,以及齿轮的冲击等各种外部和内部的激振作用而极易产生整车和局部的强烈振动。汽车的这种振动使汽车的动力性得不到充分的发挥,使经济性变坏。同时,还要影响汽车的通过性、操纵稳定性和平顺性,使乘员产生不舒服和疲乏的感觉,甚至损坏汽车的零部件和运载的货物,缩短汽车的使用寿命[1]。因此,研究汽车振动的目的主要有两方面:一是降低振动对汽车零部件的损伤、对汽车使用性能的危害;二是试图利用振动为汽车设计服务,利用振动机理设计制造振动机械以减轻劳动强度,提高工作效率是不乏先例的。 2汽车振动的理论分析 2.1建立振动的力学模型 当一个实际振动系统较复杂时,建立的模型越复杂,越接近实际情况,模拟越逼真,但往往使分析困难;相反地,建立模型时,分析越容易,但得到的结果可能不精确,因此,在建立振动系统力学模型中,总是在求得简化表达和逼真模拟二者之间的折衷[2]。振动分析的关键就是:根据研究的内容和要求,把所研究的对象以及外界对它的作用简化为一个既简单又能在动态特性方面与原来的研究对象等效的力学模型。 汽车是由多个系统组成的复杂的振动系统,每个系统都存在振动问题。主要包括发动机、传动系统、制动系统、转向系统、悬架系统、车身和车架系统存在的振动问题。研究汽车这样一个复杂的振动系统,要根据所分析的问题进行简化,具体简化方案有以下几种 [3]: 1)当汽车对称于其纵轴线时,汽车车身只有垂直振动和俯仰振动对平顺性影响最大。此时,将汽车简化成如图1a)所示的四个自由度的平面模型,因轮胎阻尼较小,在此予以忽略。在这个模型中,车身质量m2,主要考虑垂直和俯仰两个自由度前、后车轴质量m1f,m1r。有两个垂直自由度。 2)当汽车前、后轴悬架质量分配达到一定值时,前、后悬架系统的垂直振动几乎是独立的。于是可以将汽车进一步简化为如图1b)所示的车身和车轮两个自由度振动系统。 M2:为簧载(车身)质量,m1为非簧载(车轮)质量。分析平顺性时,只考虑两个质量的垂直自由度。
《MATLAB》期末大作业 学院土木工程与建筑学院 专业 班级 姓名 指导教师李琳 2018 年 5 月16 日
明 作业内容题目2:问题描述:在[0 2π]范围内绘制二维曲线图y=cos(5x)*sin(x) (1)问题分析 这是一个二维绘图问题,先划定x的范围与间距,再列出y的表达式,利用plot函数绘制二维曲线。 (2)软件说明及源代码 >> x = 0:pi/10:2*pi; >>y = cos(5*x).*sin(x); >>plot(x,y) (3)实验结果 题目4:问题描述:创建符号函数并求解,要求写出步骤和运行结果 (1)创建符号函数f=ax2+bx+c (2)求f=0的解 (1)问题分析 这是一个符号函数显示以及符号函数的求解问题,第一问先定义常量与变量,在写出f表达式,利用pretty函数显示f。第二问利用solve函数求解f=0时的解。 (2)软件说明及源代码
第一问 >> syms a b c x; >> f=a*x^2+b*x+c; >> pretty(f) 第二问 >>syms a b c x; >>f=a*x^2+b*x+c; >> solve(f) (3)实验结果 1、 2、 题目5:问题描述:求积分 (1)问题分析 这是一个利用符号函数求积分的问题,先定义变量x,再列出I1表达式,利用int函数求在范围0到Pi/2上的积分。 (2)软件说明及源代码 >> syms x; >> I1=(1-2*sin(2*x))^0.5; >> int(I1,0,0.5*pi) (3)实验结果 题目6:问题描述:分别随机产生一个6×6的整数矩阵(元素可在[-20,20]之间),求该随机阵的秩,特征值和特征向量。 (1)问题分析 这是一个矩阵运算问题,先利用rand函数产生一个6*6的元素在-20到20
2015年春季学期 《MATLAB语言及应用》课程试卷 姓名:李清蔚 学号:11408010304 学院:机电学院 专业:机械设计制造及其自动化 (1)请概括Matlab中冒号(:),逗号(,),分号(;)的功能?(6分) :用于生成一位数组,表示一位数组的全部元素或多维数组的某一维的全部元素 ,用于要显示计算结果的命令之间的分隔符,用于输入变量之间的分隔符,用于数组行元素之间的分隔符。 ;用于不显示计算结果命令行的结尾,用于不显示计算结果命令之间的分隔符,用于数组元素行之间的分隔符。 (2)a=[1 -6 0 0.45 0 100],b=[0 1.5 4 0 0.5 -34],请问在进行逻辑运算时,a、b分别相当于什么样的逻辑量?a与b的逻辑与、逻辑或都分别是什么?(4分) 元素方式的逻辑变量a&b=[0 1 0 0 0 1], a|b=[1,1,1.1,1] (3)有几种建立矩阵的方法?各有什么优点?(4分) 直接输入矩阵,eye()生成单位矩阵,通过M文件建立矩阵,通过外部数据文件导入矩阵 (4)生成一个7阶的魔方矩阵A,再采用相应的MATLAB命令,将其全部奇数行提取出来,赋给矩阵B,给出执行语句以及计算结果。(4分) A=magic(7) table=[1 3 5 7]; [n,len]=size(table); B=A(table(1),:); for i=2:len B=[B;A(table(i),:)]; End
B= 30 39 48 1 10 19 28 46 6 8 17 26 35 37 13 15 24 33 42 44 4 22 31 40 49 2 11 20 (5)生成5阶魔方矩阵A,再分别计算A中元素的平方、A矩阵的平方,给出执行语句以及计算结果。(5分) A=magic(5) B=A.^2 C=A^2 A = 17 24 1 8 15 23 5 7 14 16 4 6 13 20 22 10 12 19 21 3 11 18 25 2 9 B = 289 576 1 64 225 529 25 49 196 256 16 36 169 400 484 100 144 361 441 9 121 324 625 4 81 C = 1090 900 725 690 820 850 1075 815 720 765 700 840 1145 840 700 765 720 815 1075 850 820 690 725 900 1090 (6)生成矩阵 8412 6115 689 a ?? - ?? =-- ?? ?? - ??,计算a的行列式、逆矩阵,给出执行语句以 及计算结果。(5分) b = 784 c = 0.0753 0.0765 0.1429 0.0306 0.1837 0.1429 -0.0230 0.1122 0.1429
学号:姓名: 《Matlab/Simulink在数学计算与仿真中的应用》大作业1.假设地球和火星绕太阳运转的半径分别为r和2r,利用comet指令动画显示从地球 到火星的转移轨迹(r可以任意取值,要求实时显示探测器、太阳、地球和火星的位置)。 解函数function comet(varargin) [ax,args,nargs] = axescheck(varargin{:}); error(nargchk(1,3,nargs,'struct')); % Parse the rest of the inputs if nargs < 2, x = args{1}; y = x; x = 1:length(y); end if nargs == 2, [x,y] = deal(args{:}); end if nargs < 3, p = 0.10; end if nargs == 3, [x,y,p] = deal(args{:}); end if ~isscalar(p) || ~isreal(p) || p < 0 || p >= 1 error('MATLAB:comet:InvalidP', ... 'The input ''p'' must be a real scalar between 0 and 1.'); End 指令 %particle_motion t = 0:5:16013; r1=6.7e6;%随便给定参数 %--------------------------- r2=2*r1; g=9.8; R=6.378e6; m=g*R^2; %内轨道 v_inner=sqrt(m/r1); w_inner=v_inner/r1; x_inter=r1*cos(w_inner*t); y_inter=r1*sin(w_inner*t); %外轨道 v_outer=sqrt(m/r2); w_outer=v_outer/r2;
《MATLAB语言及应用》期末大作业报告 1.数组的创建和访问(20分,每小题2分): 1)利用randn函数生成均值为1,方差为4的5*5矩阵A; 实验程序:A=1+sqrt(4)*randn(5) 实验结果: A = 0.1349 3.3818 0.6266 1.2279 1.5888 -2.3312 3.3783 2.4516 3.1335 -1.6724 1.2507 0.9247 -0.1766 1.1186 2.4286 1.5754 1.6546 5.3664 0.8087 4.2471 -1.2929 1.3493 0.7272 -0.6647 -0.3836 2)将矩阵A按列拉长得到矩阵B; 实验程序:B=A(:) 实验结果: B = 0.1349 -2.3312 1.2507 1.5754 -1.2929 3.3818 3.3783 0.9247 1.6546 1.3493 0.6266 2.4516 -0.1766 5.3664 0.7272 1.2279 3.1335 1.1186 0.8087 -0.6647 1.5888 -1.6724 2.4286 4.2471
-0.3836 3)提取矩阵A的第2行、第3行、第2列和第4列元素组成2*2的矩阵C;实验程序:C=[A(2,2),A(2,4);A(3,2),A(3,4)] 实验结果: C = 3.3783 3.1335 0.9247 1.1186 4)寻找矩阵A中大于0的元素;] 实验程序:G=A(find(A>0)) 实验结果: G = 0.1349 1.2507 1.5754 3.3818 3.3783 0.9247 1.6546 1.3493 0.6266 2.4516 5.3664 0.7272 1.2279 3.1335 1.1186 0.8087 1.5888 2.4286 4.2471 5)求矩阵A的转置矩阵D; 实验程序:D=A' 实验结果: D = 0.1349 -2.3312 1.2507 1.5754 -1.2929 3.3818 3.3783 0.9247 1.6546 1.3493 0.6266 2.4516 -0.1766 5.3664 0.7272 1.2279 3.1335 1.1186 0.8087 -0.6647 1.5888 -1.6724 2.4286 4.2471 -0.3836 6)对矩阵A进行上下对称交换后进行左右对称交换得到矩阵E; 实验程序:E=flipud(fliplr(A)) 实验结果:
华南农业大学 《控制系统仿真与计算机辅助设计》基于Matlab /Simulink的风力发电机仿真 施茂良200830460226 陶杰200830460227 2012年1月2日
题目: 用simulink 搭建风力发电机部分的仿真图,使其工作模式满足式(2-4),使用的发电机是永磁同步电机,具体背景材料附后。风力发电机的控制思路如下:我们需要依据风的速度控制电机的转速使得风能的利用率最高,而电机的转速通过改变永磁同步电机的定子端电压ud 和uq 来实现,具体方程为(3-28)。最终通过PWM 的导通关断时间来改变端电压,如材料图 2所示。具体要求: 1. 根据公式(2-5)画出类似 图 2.3 的曲线。 且当β=0时,画出为获得最大的风能利用率,叶尖速λ和风速v 之间的曲线关系。风力机用来捕获风能,将叶片迎风扫掠面积内的一部分空气的动能转换为有用的机械能,它决定了整个风力发电系统装置有效功率的输出。 风力机的输入功率是 3 2 3 112 2 V P A v R v ρρπ= = 式中, ρ为空气密度;A 为风力机叶片扫掠面积;R 为叶片半径。v 为风速。 风力机的输出功率为 3 012 p P A v C ρ= 式中, p C 为风能利用系数,其值小于1。 风力机输出转矩为;其中λ为叶尖速比 风能利用系数 p C 为风力机将风能转换为机械能的效率,它与风速、叶片转速,叶片直径和 桨叶节距角均有关系,是叶尖速比λ和桨叶节距角β的函数。叶尖速比λ是风能叶尖速与风速 之比,即 R v ω λ= 式中,ω为风力机叶片旋转角速度。 根据上文可知,功率与风速具有一定的关系,它们可以用下面的函数来表示
图像压缩技术研究 一、离散余弦变换编码压缩图像 1. 实验源程序: I=imread('E:\MATLAB大作业\图片\cameraman.tif') I=im2double(I); %转换图像矩阵为双精度型。 T=dctmtx(8);%产生二维DCT变换矩阵 %计算二维DCT,矩阵T及其转置是DCT函数P1*X*P2的参数a1=[16 11 10 16 24 40 51 61; 12 12 14 19 26 58 60 55; 14 13 16 24 40 57 69 56; 14 17 22 29 51 87 80 62; 18 22 37 56 68 109 103 77; 24 35 55 64 81 104 113 92; 49 64 78 87 103 121 120 101; 72 92 95 98 112 100 103 99 ]; for i=1:8:200 for j=1:8:200 P=I(i:i+7,j:j+7); K=T*P*T'; I2(i:i+7,j:j+7)=K; K=K./a1;%量化
K(abs(K)<0.03)=0; I3(i:i+7,j:j+7)=K; end end figure; imshow(I2); title('DCT变换后的频域图像');%显示DCT变换后的频域图像 for i=1:8:200 for j=1:8:200 P=I3(i:i+7,j:j+7).*a1;%反量化 K=T'*P*T; I4(i:i+7,j:j+7)=K; end end figure; imshow(I4); title('复原图像'); imwrite(I4,'复原图像6.jpg'); B=blkproc(I,[8,8],'P1*x*P2',T,T'); %二值掩模,用来压缩DCT系数,只留下DCT系数中左上角的10个 mask=[1 1 1 1 0 0 0 0 1 1 1 0 0 0 0 0 1 1 0 0 0 0 0 0
哈工大机械设计电算实验(matlab2010)
机械设计电算实验 一:普通V带传动设计内容和任务 1、普通V带传动设计内容 给定原始数据:传递的功率P,小带轮转速n,传动比i及工作条件。 设计内容:带型号,基准长度Ld,根数Z,传动中心距a,带轮基准直径dd1、dd2,带轮轮缘宽度B,初拉力F0,和压轴力FQ。 2、CAD任务: (1)编制V带传动设计程序框图。 (2)编制V带传动设计原程序。 (3)按习题或作业中数据运行程序,要求对每一组数据各按三种V带型号计算,对每一种带型号选三种小带轮直径进行计算并输出所有结果。
二、变量标识符 kka 3 工作情况系数K A n r/min 4 小带轮转速n 1 5 工作机载荷特性载荷类型 6 原动机类型原动机类型 7 工作年限a年b班 8 带型号V带带型 dd1 mm 9 小带轮基准直径d d1 dd2 mm 10 大带论基准直径d d2 11 带速v v m/s vmax m/s 12 最大带速v max a0 mm 13 预估中心距a ld mm 14 基准长度L d 15 实际中心距 a aa mm r 度 16 小带轮包角α 1 17 V带根数Z z 18 基本额定功率P po kw pp0 kw 19 功率增量ΔP ki 20 传动比系数K i
三、程序框图
四、源程序与其说明 程序说明: 本程序用Matlab2010b软件编制,主要针对机械设计大作业上的题型设计。使用时只要打开m 文件,并点击运行,按照提示进行即可。首先输入原始数据,然后根据自己的需要选择带型,中心距即可得到设计结果,无需再查找资料,方便高效,计算过程如有错误会进行提示,并返回到输入处进行改正。而且该程序可以直接计算下一带轮直径或者计算下一带型,比较方便。源程序如下(先复制到记事本,再新建一个m文件,粘贴) clear all; disp('欢迎使用本程序,请输入V带传动设计的原始数据'); p=input('电动机工作功率(kw) P='); n=input('电动机满载转速(r/min) nm='); i=input('第一级传动比 i1='); a=input('请输入最短工作工作年限 a年b班 a='); b=input(' b='); disp('是否反复起动、正反转频繁或工作条件恶劣'); ka1=input('是请输入1,否请输入0。请输入:'); disp('原动机类型:'); disp('I类原动机包括普通笼型交流电动机,同步电动机,'); disp(' 直流电动机(并激),n>=600r/min的内燃机') disp('II类原动机包括交流电动机(双笼型、滑环式、单相、大转差率),'); disp(' 直流电动机(复激、串激),单缸发动机,n<=600r/min的内燃机') d1=input('请选择原动机的类型,输入1或2。请输入:'); disp('载荷类型:'); disp('1、载荷平稳;2、载荷变动小;3、载荷变动较大;4、载荷变动很大。'); e1=input('请选择载荷类型请输入:'); c=[3 710 38 80;2.2 940 28 60;3 960 38 80;4 960 38 80]; if p==3&&n==710 d=38; e=80;