ADAS智能驾驶辅助系统
一、ADAS技术发展现状:
未来科技进步趋势将从“互联网”向“物联网”发展,智能驾驶是“万物互联”的最好载体,“无人驾驶”是汽车智能的终极发展方向。智能驾驶将进入高速发展期,预计在2020-2025年智能汽车将进入量产阶段,结合移动互联网、大数据、云计算的智能驾驶服务预计会在十年后全面推广。ADAS 是智能驾驶汽车的关键落地点,模块化分类主要有以下几点:车道偏离预警LDW,车道保持辅助LKA,紧急自动刹车AEB,智能远光灯IHC,自动泊车AP 等等。目前ADAS在国内外都属于研究阶段,只有一些高端车有了部分的技术储备,例如:丰田的公路自动驾驶辅助AHAC,特斯拉的自动巡航Autopilot,通用的Super Cruise。
二、ADAS技术市场格局分析:
智能驾驶技术未来的空间格局呈现金字塔结构,主要分为三层:
传统车企掌握着汽车生产资质和整车控制集成的核心竞争,科技型企业或者研究所凭借在人工智能、人机交互方面的优势抢占一部分市场份额。
ADAS供应商利用掌握的感知识别算法等为车企和科技型公司提供ADAS 系统解决方案;
底层零部件供应商:雷达,摄像头,芯片,电子刹车等等。
分析可知:底层零部件都掌握在供应商的手上,比较分散,其核心价值在于市场份额占据比例;塔尖的传统车企与科技公司,一般都会以合作的方式,核心产品大多为无人驾驶汽车这种涉及汽车生产资质与人工智能高端、核心算法的结合领域;中间层的ADAS研究是衔接二者的一个关键落地点,底层零部件是ADAS实现的载体,无人驾驶汽车是ADAS的高度集成。
ADAS技术领域的研究不仅仅可以作为塔尖与塔底的结合点,还可以通过ADAS技术的逐步深入研究与系统化集成,逐渐成为屹立于塔尖的科技型企业,从而实现整个技术点在质上的飞越与创新。
三、ADAS技术介绍:
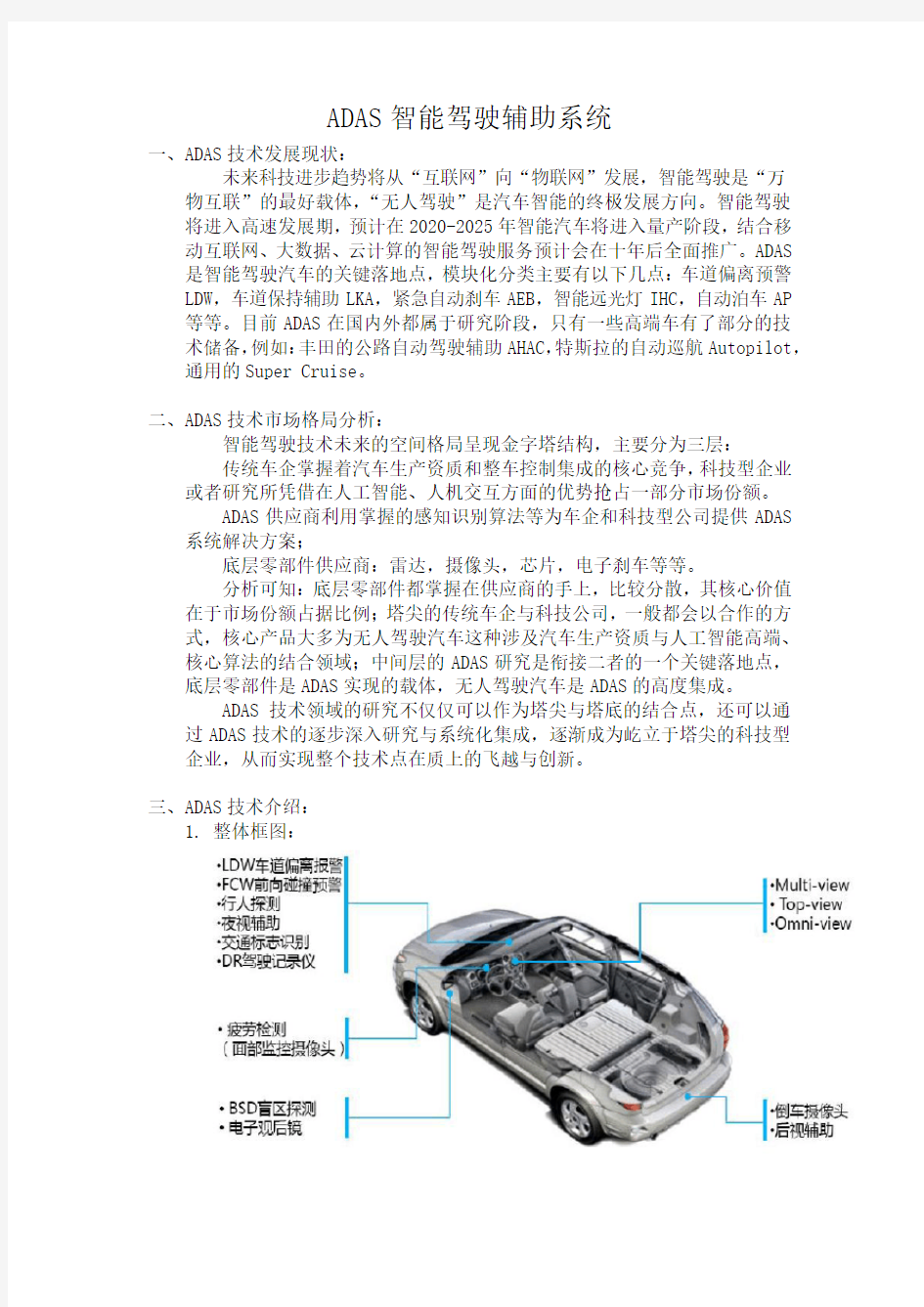
1.整体框图:
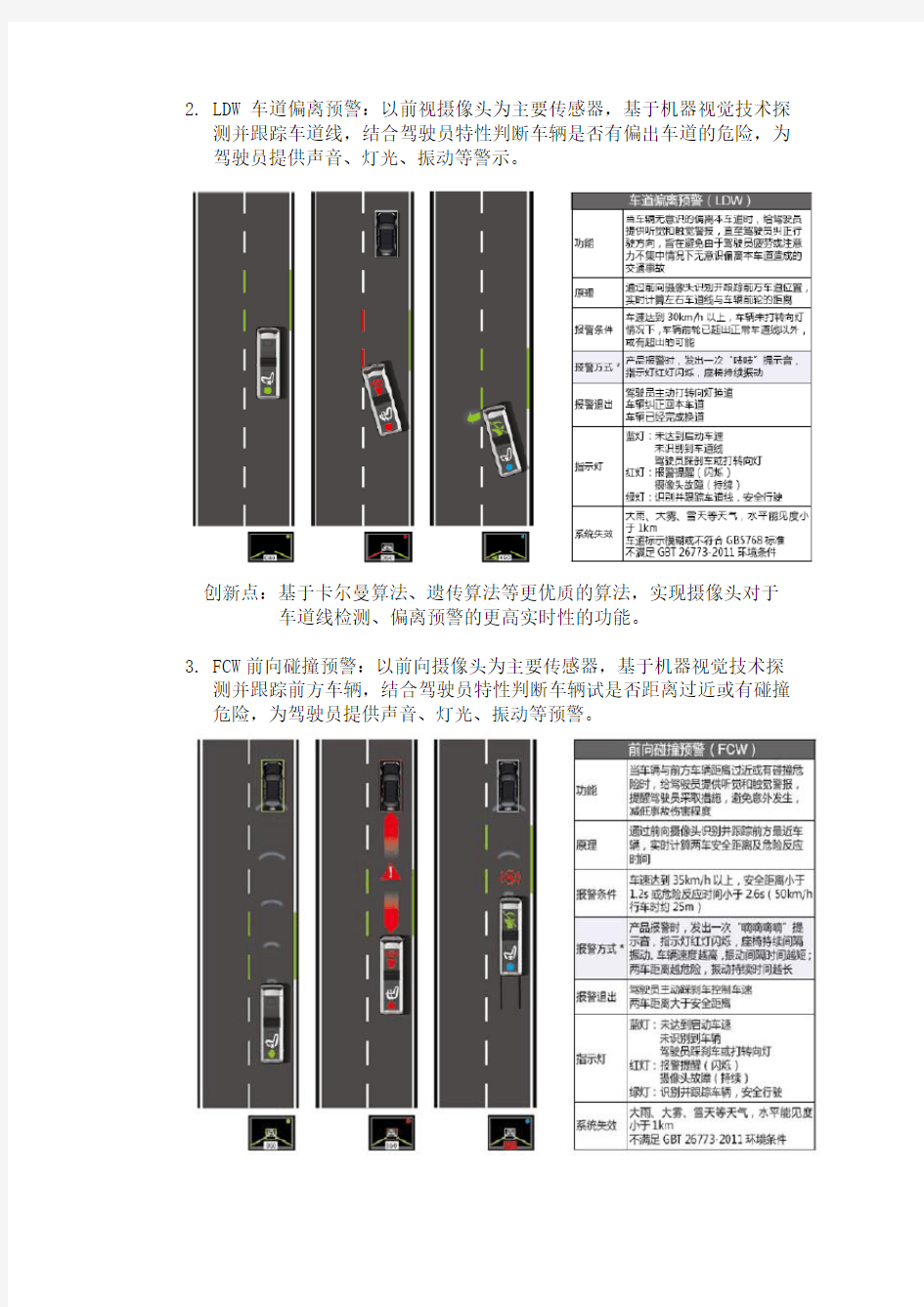
2.LDW车道偏离预警:以前视摄像头为主要传感器,基于机器视觉技术探
测并跟踪车道线,结合驾驶员特性判断车辆是否有偏出车道的危险,为驾驶员提供声音、灯光、振动等警示。
创新点:基于卡尔曼算法、遗传算法等更优质的算法,实现摄像头对于车道线检测、偏离预警的更高实时性的功能。
3.FCW前向碰撞预警:以前向摄像头为主要传感器,基于机器视觉技术探
测并跟踪前方车辆,结合驾驶员特性判断车辆试是否距离过近或有碰撞危险,为驾驶员提供声音、灯光、振动等预警。
创新点:基于机器学习算法,通过前车摄像头对行人、车的识别与检测。
不仅仅可以对各种形状的人、车进行检测,并且可以在非常短的
时间内将人、车的距离实时的传输到车载上并显示出来,并且根
据报警系统给出相应的提示。目前研究的难点也在实时性上(百
度目前只能实现15帧/s)。
四、ADAS技术特点:
特点1:识别算法适应性:
掌握适应白天、夜晚、逆光、反光、桥洞、小雨等不同工况下的车
道识别算法。
典型道路文字干扰阴影遮挡
强光逆光夜间道路下雨道路特点2:传感器优势:
采用目前市面上最为前沿的Amba、海思、Tiandy的摄像头,内部
采用ARM11、DSP高处理器对音、视频信号进行实时的处理。这种
开发方案具有高深度、低宽度的研究特点,基于SDK直接对算法进
行二次调试与研发。
特点3:产品集成化:
基于摄像头的ADAS产品,可以基于目前车上已有的行车记录仪进
行集成开发,推出一款既有行车记录仪功能,且又能实现ADAS技
术点的高端“防碰撞行车记录仪”的集成化产品。
特点4:系统设计优势:
本设计方案涉及:ADAS硬件设计,图像识别,报警算法,音频处
理技术算法等各个核心设计环节,可以根据需求进行差异化开发。
五、总结:
基于以上关于ADAS技术的初步讨论,显而易见:汽车行业的创新点都在智能驾驶方面,而ADAS技术又是智能驾驶的核心:不仅是人工智能的一个衔接点,而且也表现了其巨大的潜在升值空间。ADAS技术的核心点,主要在基于摄像头的处理算法上,包括目标识别、音视频处理技术、预判性避障、系统的高度集成化等等因素,而这些技术的最大创新点都集中在音视频处理算法的实时性上,这是最大、最难、最前沿的创新技术点。
文章编号:1002O0268 (2007)07O0107O05 智能车辆安全辅助驾驶技术研究近况 基金项目: 国家自然科学基金资助项目 () 作者简介: 王荣本(1946-),男,教授,博士生导师, 研究方向为智能车辆、汽车安全辅助驾驶、物流自动化 xx,xx,xx,xx,余天xx (吉林大学交通学院,吉林长春130025) 摘要: 论述了安全辅助驾驶技术的研究现状、研究的必要性以及研究进展。安全辅助驾驶技术包括车道偏离预警与保持、前方车辆探测及安全车距保持、行人检测、驾驶员行为监测、车辆运动控制与通讯等。分析了各种传感器的优缺点及其在实际应用过程中存在的问题,基于单一传感器不能很好地解决安全辅助驾驶技术可靠性和环境适应能力的要求,应结合激光雷达技术解决图像模糊问题,利用红外传感器增强机器视觉识别的可靠性,未来的安全辅助驾驶技术应该采取多种传感器融合的技术,结合毫米波雷达和激光雷达系统具有深度测量精确的特点,将极大的推动汽车安全辅助驾驶系统的应用和推广。 关键词: 智能交通系统;安全辅助驾驶;车道偏离预警;行人检测;车间通讯中图分类 号:
U491文献标识 码:AReviewontheResearchofIntelligentVehicleSafetyDrivingAssistantTechnology WANGRongOben,GUOLie,JINLiOsheng,GUBaiOyuan,YUTianOhong (SchoolofTransportation,JilinUniversity,Jilin Changchun 130025,China) Abstract: Keywords: 引言 智能车辆是利用传感器技术、信号处理技术、通讯技术、计算机技术等,辨识车辆所处的环境和状态,根据各传感器所得到的信息做出分析和判断,或者给司机发出劝告和报警信息,提请司机注意规避危险;并能在紧急情况下,帮助司机操作车辆(即辅助驾驶),防止事故的发生。 早期智能车辆研究主要集中在如何采用各种传感器技术实现车辆全自动化无人驾驶,随着研究的深入,重点着眼于提高汽车的安全性、舒适性以及提供优良的人车交互界面,并努力向市场推广智能车辆相关技术的应用。 1998年美国运输部认为日益严重的交通事故是最迫切需要解决的问题,开始组织实施智能车辆先导IVI(IntelligentVehicleInitiative)计划。该计划的基本宗旨和目标是预防交通事故及其引起的人员伤亡,提高安全性,并以人为因素为基础,防止驾驶员精神分散,促进防撞系统的推广应用。 智能车辆技术研究重点的转移主要是日渐增长的交通事故以及对减少驾驶员操作强度的需求。根据美国运输部IVI计划,仅在美国,每年至少发生680万起交通事故,造成412万人死亡。 在一些发达国家,情况就更严重。如我国在2004年共发生道路交通事故517889起,造成1077人死亡,直接财产损失2319亿元,与2003年相比,死亡人数上升216%。1安全辅助驾驶技术的研究现状 安全辅助驾驶技术主要目的是提高汽车行驶的安全性,通过安装在车辆及道路上的各种传感器掌握本车、道路以及周围车辆的状况等信息,为驾驶员提供劝
ADAS(高级驾驶辅助系统)高级驾驶辅助系统(Advanced Driver Assistant System),简称ADAS,是利用安装于车上的各式各样的传感器,在第一时间收集车内外的环境数据,进行静、动态物体的辨识、侦测与追踪等技术上的处理,从而能够让驾驶者在最快的时间察觉可能发生的危险,以引起注意和提高安全性的主动安全技术。ADAS 采用的传感器主要有摄像头、雷达、激光和超声波等,可以探测光、热、压力或其它用于监测汽车状态的变量,通常位于车辆的前后保险杠、侧视镜、驾驶杆内部或者挡风玻璃上。早期的ADAS 技术主要以被动式报警为主,当车辆检测到潜在危险时,会发出警报提醒驾车者注意异常的车辆或道路情况。对于最新的ADAS 技术来说,主动式干预也很常见。ADAS通常包括以下17种用与汽车驾驶辅助的系统: 1、导航:导航是一个研究领域,重点是监测和控制工艺或车辆从一个地方移动到另一个地方的过程。导航领域包括四个一般类别:陆地导航,海洋导航,航空导航和空间导航。 2、时交通系统TMC:TMC是是欧洲的辅助GPS导航的功能系统。它是通过RDS方式发送实时交通信息和天气状况的一种开放式数据应用。借助于具有TMC功能的导航系统,数据信息可以被接收并解码,然后以用户语言或可视化的方式将和当前旅行路线相关的信息展现给驾驶者。 3、电子警察系统ISA:我国道路交通管理系统中的“电子警察”是随着科技的发展而产生的,是一个时代的产物。它作为现代道路交通安全管理的有效手段,可以迅速地监控、抓拍、处理交通违章事件,迅速地获取违章证据,提供行之有效的监测手段,为改善城市交
通拥堵现象起到了重要的作用,已成为道路交通管理队伍中必不可少的一员,以充分发挥它准确、公正的执法作用。 4、车联网(Internet of Vehicles):车联网是由车辆位置、速度和路线等信息构成的巨大交互网络。通过GPS、RFID、传感器、摄像头图像处理等装置,车辆可以完成自身环境和状态信息的采集;通过互联网技术,所有的车辆可以将自身的各种信息传输汇聚到中央处理器;通过计算机技术,这些大量车辆的信息可以被分析和处理,从而计算出不同车辆的最佳路线、及时汇报路况和安排信号灯周期 5、自适应巡航ACC(Adaptivecruise control):自适应巡航控制系统是一种智能化的自动控制系统,它是在早已存在的巡航控制技术的基础上发展而来的。在车辆行驶过程中,安装在车辆前部的车距传感器(雷达)持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前车之间的距离过小时,ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。自适应巡航控制系统在控制车辆制动时,通常会将制动减速度限制在不影响舒适的程度,当需要更大的减速度时,ACC控制单元会发出声光信号通知驾驶者主动采取制动操作。当与前车之间的距离增加到安全距离时,ACC控制单元控制车辆按照设定的车速行驶。 6、车道偏移预警系统LDWS(Lanedeparture warning system):车道偏离预警系统是一种通过报警的方式辅助驾驶员减少汽车因车道偏离而发生交通事故的系统。车道偏离预警系统由图像处理芯片、控制器、传感器等组成。
第八章 ADAS与智能网联汽车的应用
本章小结 本章的学习目标你已经达成了吗?请通过思考以下问题的答案进行结果检验。序号问题自检结果 1 ADAS的含义是什么?全国汽车标准化技术委员会将ADAS定义为利用安装在车辆上的传感、通信、决策及执行等装置,监测驾驶员、车辆及其行驶环境并通过影像、灯光、声音、触觉提示/警告或控制等方式辅助驾驶员执行驾驶任务或主动避免/减轻碰撞危害的各类系统的总称。 2 ADAS的技术路线是什么?ADAS的技术路线有两条:1)第一条技术路线是从预警系统到干预系统的升级;2)第二条技术路线是将主动安全与被动安全系统相结合。 3 ADAS预警系统的组成和主要功能 是什么? ADAS预警系统的组成包括:驾驶员疲劳监 测、驾驶员注意力监测、车辆检测、交通标 志识别、智能限速提醒、弯道速度预警、抬 头显示、全景影像监测、夜视、行人检测、 前向车距监测、前向碰撞预警、后向碰撞预 警、车道偏移报警系统、变道碰撞预警、盲 区监测、侧面盲区监测、转向盲区监测、后 方交通穿行提示、前方交通穿行提示、车门 开启预警、倒车环境辅助、低速行车环境辅 助。 主要功能: (答案请参考教材第八章中表8-1ADAS预警 类辅助驾驶系统的主要功能表的内容) 4 ADAS驾驶辅助系统的组成和主要 功能是什么? ADAS驾驶辅助系统的组成主要包括:自动紧 急制动、紧急制动辅助、自动紧急转向、紧 急转向辅助、智能限速控制、车道保持辅助、 车道居中控制、车道偏离抑制、智能泊车辅 助、增强现实导航、自适应巡航控制、全速 自适应巡航控制、交通拥堵辅助、加速踏板 防误踩、酒精闭锁、自适应远光灯、自适应 前照灯、远光自动控制、远光自动控制。
前言 高级驾驶辅助系统是利用安装在车上的各式各样传感器,在汽车行驶过程中随时来感应周围的环境,收集数据,进行静态、动态物体的辨识、侦测与追踪,并结合导航仪地图数据,进行系统的运算与分析,从而预先让驾驶者察觉到可能发生的危险,有效增加汽车驾驶的舒适性和安全性。 近年来ADAS市场增长迅速,原来这类系统局限于高端市场,而现在正在进入中端市场,与此同时,许多低技术应用在入门级乘用车领域更加常见,经过改进的新型传感器技术也在为系统布署创造新的机会与策略。 为帮助到更多从事汽车ADAS领域的工程师朋友,电子发烧友网特别策划一周回顾系列白皮书之《高级驾驶辅助系统ADAS 核心设计攻略》,以期在工程师设计开发中提供高效的参考价值。
Everything For Engineers 目录 参考设计TI ADI 4高级驾驶员辅助系统(ADAS)设计 6TIDA-00151用于停车辅助或盲点检测系统的汽车类超声波传感器接口9TIDA-00162用于汽车应用的环视解决方案 10高级驾驶员辅助系统(ADAS)解决方案 1477GHz雷达系统参考设计 15MPC567xK面向ADAS应用的Qorivva32位MCU 16MPC5561面向高级驾驶员辅助应用的Qorivva32位MCU 17MC33905带高速CAN和LIN的第二代系统基础芯片 18MR2001多通道77GHz雷达收发器芯片组 19高级驾驶员辅助系统(ADAS)视觉解决方案 20ADSP-BF606BLACKFIN双核处理器,适合高性能数字信号处理应用21ADV728010位、4倍过采样SDTV视频解码器 22ADV7125:330MHz、三通道、8位高速视频DAC 23AD725RGB转NTSCPAL编码器 24ADA4851-1低成本、高速、轨到轨输出运算放大器 24ADT7311汽车应用高精度数字SPI温度传感器 26高级汽车环视辅助驾驶系统(ADAS)方案 30三大ADAS检测系统解决方案简述 35高级驾驶监测车载系统电路设计 38采用ADAS3023同步数据采集系统电路设计 42汽车油量监测报警器电路设计 46汽车智能驾驶辅助系统数据发送与接收电路设计 49汽车传感器之信号处理电路设计 52汽车辅助系统CAN总线接口电路设计 38采用ADAS3023同步数据采集系统电路设计 42汽车油量监测报警器电路设计 46汽车智能驾驶辅助系统数据发送与接收电路设计 49汽车传感器之信号处理电路设计 52汽车辅助系统CAN总线接口电路设计 56电源电路设计 58无线接收接口电路设计 64基于ADAS嵌入式导航仪电路设计 电路图精华飞思卡尔 世强 瑞萨
先进驾驶辅助系统(ADAS)测试技术 一、中国汽车行业车辆主动安全的发展现状 汽车进入中国市场的短短20年间,已然使我国成为全球最大的汽车生产及销售国。2014年的产销分别完成2143.05万辆和2107.91万辆,比上年同期分别增长7.2%和6.1%。中国汽车市场的高速疾行,无论是消费者还是汽车制造企业,在这个过程中都受益匪浅。然而婉转优美的旋律背后,掩盖的却是整个社会浮躁与取巧的心态。自由奔放增长的同时伴随着一个让人焦虑的数字,仅2013年,我国交通事故死亡人数就达到60000人,这个数字背后隐藏的事实是对安全意识和辅助措施的缺乏。 今年年初奥迪在拉斯维加斯举行的CES(消费电子展)期间,向外界展示了集合汽车安全、传感器通信之大成的自动驾驶技术,前不久丰田汽车也在东京举行“全球安全技术交流会”,而中国的汽车企业近年来也不约而同的将研发重点放在了汽车安全技术的研发当中。无论是主动安全还是被动安全,安全产品的开发应用正在如火如荼的进行。改善汽车安全,尤其是主动安全技术(ADAS)地位正在凸显,主动安全技术(ADAS)正在成为汽车电子领域的新宠儿。 先进驾驶辅助技术(即ADAS)即主动安全技术的诠释,它是一种高级驾驶员辅助系统,在车辆行驶过程中全程帮助驾驶员的主动安全辅助系统。现阶段ADAS 系统应用最广的三大技术是自适应巡航控制系统(ACC)、车道偏离预警系统(LDW)以及自动紧急刹车系统(AEB),预计2015年这3中技术组成的ADAS市场价值将急速增加。除此之外,ADAS系统还包括夜视系统(NV)、驾驶员困倦报警系统、自适应灯光控制系统、以及限速交通标志提醒等系统。 二、ADAS技术应用的现实及普世意义 随着消费者对车辆安全的理解和需求不断提升,ADAS技术的开发与应用也就成为了汽车企业市场竞争力的重要筹码,能够让更多汽车搭载更加有效减少伤亡的安全系统,也更具有现实和普世意义。此时,除了研究ADAS的新功能和算法,保证ADAS功能在整车环境的可靠与稳定已成为了其开发最大的难点。只有通过完善的ADAS测试技术才能够尽早在研发阶段发现问题,挖掘ADAS隐藏的功能缺陷及不合理之处,才能够保证ADAS技术应用的功能完整性及有效性,从而确保产品在炙手可热的市场中的核心竞争力。 目前国际化标准组织以及Euro NCAP(汽车界最权威的安全认证机构)均对ACC、LDW系统指定了实车测试的典型工况及要求,并且Euro NCAP对此有详细的评估准则与星级评分。此外2014年Euro NCAP将AEB(自动紧急刹车系统)正式纳入评估体系,并且制订了实车测试的典型工况与评价标准。因此,ADAS 系统应用的重要性与必要性显而易见。 三、ADAS系统自身特色及测试重点 ADAS系统的功能与应用特性不同于常规汽车电子控制系统,ADAS具有自身的特点: 1)ADAS的应用场景一般为人、车、路构成的闭环系统,三者缺一不可 2)ADAS与自身车辆性能以及道路的特性、驾驶员的安全行为直接相关 3)ADAS系统通常需与多个车载控制系统协作,是一种分布式控制系统
汽车辅助驾驶统计 驾驶员辅助系统可以涵盖的功能有很多,包括:车道辅助、行车辅助、停车与操作辅助、避让辅助、转向与穿行辅助、照明与视野辅助等 博世驾驶员辅助系统涵盖了市场的需求与趋势,在必配功能方面包括自动紧急制动、车辆偏离警告等,标准功能包括自适应巡航、智能大灯控制等,除此之外还提供一些差异化功能如交通拥堵辅助、狭窄道路辅助等。 大陆集团的高级驾驶员辅助系统基于雷达、摄像机和红外传感器可以实现以下功能:紧急制动辅助;自适应巡航控制;车道偏离警告;智能前大灯控制;交通标志辅助;盲点探测和360度环绕检测(全景图)。 欧洲新车评价规程(EuroNCAP)规定,自2014年起,新车型必须装配相关驾驶员辅助系统才能获得五星安全评定。被列入配备选项的系统包括自动紧急制动、智能速度辅助、车道偏离警告或车道保持支持。
第一章浅析博世驾驶员辅助系统 ACC自适应巡航控制系统 ACC自适应巡航系统可以在道路中自动控制车速并保持与前车的距离。ACC使用雷达传感器发射电波并接收前方物体反射回的电波,根据反射回来的信号,ACC通过计算与相对距离、相对方位和相对速度来探测前方车辆,以作出加速或制动的判断。ACC可在车速约30km/h以上被激活,而停走型ACC可在静止时即可启用。 在ACC系统中,雷达传感器是最核心的部件。博世目前有两种雷达,一种为中距离雷达(MRR),可以探测160米的距离,可支持ACC最高巡航速度为150km/h,目前第七代高尔夫顶配车型上所使用的ACC系统就搭配了这款雷达,
性价比较高;博世长距离雷达(LRR)可以探测250米的距离,可支持ACC最高巡航速度为200km/h,如果该ACC系统搭配了多功能摄像头,最高巡航速度可达250km/h。奥迪A6L的停走型ACC在传统雾灯的位置装配了两部LRR,增加了探测的范围和距离。 ACC系统使用雷达传感器和多功能摄像机作为信息采集和输入端,可以在驾驶员不操作油门和刹车的情况下自动保持车距巡航,当前方车辆出现减速时随之刹停,而前方车辆离开时可自动加速至理想速度,在一定程度上接近了自动驾驶技术。不过,ACC并不能对车辆方向进行调整。 车道辅助系统/紧急制动系统 博世LDW车道偏离警告系统和LKS车道保持系统使用了一台多功能摄像头(MPC)进行车道线的识别,当系统识别到车道线时,自动进入工作状态。如果车辆在行驶中偏离了车道,且没有打转向灯,首先LDW会输出警告信号,而选择什么样的警告方式(如声音、仪表视觉符号以及方向盘振动等)由整车厂进行设定。如驾驶员没有回应,LKS系统将通过EPS电子转向系统在方向盘上施加大约3牛·米的力矩,以帮助车辆回到正确的车道上来。在这个过程中,如果驾驶员打方向灯或者大角度转动方向盘,则系统默认车辆由驾驶员接管而停止干预。
ADAS智能驾驶辅助系统 一、ADAS技术发展现状: 未来科技进步趋势将从“互联网”向“物联网”发展,智能驾驶是“万物互联”的最好载体,“无人驾驶”是汽车智能的终极发展方向。智能驾驶将进入高速发展期,预计在2020-2025年智能汽车将进入量产阶段,结合移动互联网、大数据、云计算的智能驾驶服务预计会在十年后全面推广。ADAS 是智能驾驶汽车的关键落地点,模块化分类主要有以下几点:车道偏离预警LDW,车道保持辅助LKA,紧急自动刹车AEB,智能远光灯IHC,自动泊车AP 等等。目前ADAS在国内外都属于研究阶段,只有一些高端车有了部分的技术储备,例如:丰田的公路自动驾驶辅助AHAC,特斯拉的自动巡航Autopilot,通用的Super Cruise。 二、ADAS技术市场格局分析: 智能驾驶技术未来的空间格局呈现金字塔结构,主要分为三层: 传统车企掌握着汽车生产资质和整车控制集成的核心竞争,科技型企业或者研究所凭借在人工智能、人机交互方面的优势抢占一部分市场份额。 ADAS供应商利用掌握的感知识别算法等为车企和科技型公司提供ADAS 系统解决方案; 底层零部件供应商:雷达,摄像头,芯片,电子刹车等等。 分析可知:底层零部件都掌握在供应商的手上,比较分散,其核心价值在于市场份额占据比例;塔尖的传统车企与科技公司,一般都会以合作的方式,核心产品大多为无人驾驶汽车这种涉及汽车生产资质与人工智能高端、核心算法的结合领域;中间层的ADAS研究是衔接二者的一个关键落地点,底层零部件是ADAS实现的载体,无人驾驶汽车是ADAS的高度集成。 ADAS技术领域的研究不仅仅可以作为塔尖与塔底的结合点,还可以通过ADAS技术的逐步深入研究与系统化集成,逐渐成为屹立于塔尖的科技型企业,从而实现整个技术点在质上的飞越与创新。 三、ADAS技术介绍: 1.整体框图:
汽车智能辅助驾驶系统
目录 1 需求分析……………………………………… (1) 2 智能车和智能交通系统简介 (1) 3 CCD摄像头的图像采集原理 (2) 4 图像的预处理……………………………………… (3) 5道路区域检测……………………………………… (4) 6目标检测和车距测量……………………………………… (5)
7系统的硬件构成和工作原理……………………………………… 6 8系统软件流程图……………………………………… (7) 9结论与展望……………………………………… (8) 10参考文献……………………………………… (9)
需求分析 汽车作为一种快速、灵活而经济的交通工具,普遍受到人们的关注。20世纪后半叶以来,汽车工业得到了迅速发展。国家积极推进汽车工业和消费,汽车进入寻常百姓家。但是汽车给我们带来方便的同时也带来了不少的问题,其中最主要的就是交通事故频繁发生,由此导致的人员伤亡和财产损失数目嘛人。据全球各交通和警察部门的统计:2003年全世界交通事故死亡人数为50万人,其中,中国交通事故死亡人数为l0.4万人,占世界交通事故死亡人数的20%还多,而美国、俄罗斯的死亡人数则分别为4万人和2.6万人;拿两个规模相当的城市比较,北京的交通事故致死率为14%,东京则为0.7%。在诸多交通事故中,由于驾驶员反应不及 1
造成的交通事故占80%以上,汽车追尾事故占30%一40%,而追尾事故造成的损失和伤亡又占总损失的60%以上。据奔驰汽车公司的一项研究表明:驾驶员只要在有碰撞危险的0.5秒前得到预警,就可以避免至少60%的追尾撞车的事故,30%的迎面撞车事故和50%的路面相关事故;若在1秒前“预警”,则可避免90%的事故发生。中国正在成为全球最大的新兴市场,汽车保有量已突破2600万辆,年销售汽车将突破600万辆,未来5年将成为仅次于美国的全球第二大汽车销售国。而纵观世界汽车的数量则更是多得惊人,光是美国国内的汽车保有量就多达2亿多辆,并且世界每年还有成亿的新车涌向市场。如此巨大的汽车数量和汽车市场,加上极端残酷的车祸事故和悲惨后果,发展汽车安全技术刻不容缓。汽车安全技术主 2
10.16638/https://www.doczj.com/doc/468142019.html,ki.1671-7988.2019.09.014 基于Prescan的智能驾驶辅助系统在环研究 赵伊齐,张引,申成刚,王严 (华晨汽车工程研究院,辽宁沈阳110141) 摘要:为在短时间内完成大量验证高级驾驶辅助系统的产品性能,利用Prescan对控制器进行软件在环研究。首先对产品的性能及功能规范提出开发需求,作为测试依据;利用仿真软件Prescan完成测试场景及动力学模型的搭建;运用Matlab/Simulink实现自动化测试。结果表明,利用Prescan进行软件在环测试,可缩短开发周期,减少开发成本,有效提高产品性能。 关键词:高级驾驶员辅助系统;软件在环;自动化测试 中图分类号:U467 文献标识码:A 文章编号:1671-7988(2019)09-47-04 Research on the loop of Advanced driver assistance systembased on Prescan Zhao Yiqi, Zhang Yin, Shen Chenggang, Wang Yan ( Brilliance Auto R&D Center, Liaoning Shenyang 110141 ) Abstract: In order to complete a large number of product performance verification of advanced driving assistance system in a short time, Prescan was used to study the controller software in the loop. Firstly, the development requirements of product performance and functional specifications are proposed as the test basis. The simulation software Prescan was used to build the test scene and dynamic model. Matlab/Simulink for automated testing. The results show that using Prescan can shorten the development cycle, reduce the development cost and improve the product performance. Keywords: Driving assistance system; Software in the loop; Testautomation CLC NO.: U467 Document Code: A Article ID: 1671-7988(2019)09-47-04 前言 高级驾驶员辅助系统(以下简称ADAS)是一项提高安全系数的主动安全技术,其主要通过传感器完成对周围信号的采集、CAN等通讯系统完成相关信号的传递。最后将信号传送给整车控制器,使驾驶员能够在最快时间内察觉可能发生的情况。 目前,很多在研究高级驾驶员辅助系统设计环节中引入在环仿真测试,主要有模型在环(Model in the loop,以下简称MIL)、软件在环(Software in the loop,以下简称SIL)及硬件在环(Hardware in the loop,以下简称HIL)。MIL 主要验证控制模型,其控制算法模型是否准确实现功能要求;SIL旨在通过PC验证代码实现的功能是否实现功能需求;HIL是将被控对象模型放在模拟整车环境下进行测试。SIL 可实现被控模型算法的在线或离线仿真,减少实际代码的调试,从而降低成本[1]。 本文利用Prescan对控制器软件进行软件在环测试,将对产品提出的功能需求以及安全需求作为测试用例并作为仿真测试依据,利用Prescan完成测试场景以及传感器模型的搭建;将模型代码以S function的形式进行封装并通过simu -link进行比较;最后基于Matlab完成M文件的编写,实现控制器软件的自动化测试。 作者简介:赵伊齐,工程师,就职于华晨汽车工程研究院,从事自 动驾驶系统软件测试工作。 项目基金:*国家重点研发计划(2016YFB0101107)资助。 47
目录 1 需求分析 (1) 2 智能车和智能交通系统简介 (1) 3 CCD摄像头的图像采集原理 (2) 4 图像的预处理 (3) 5道路区域检测 (4) 6目标检测和车距测量 (5) 7系统的硬件构成和工作原理 (6) 8系统软件流程图 (7) 9结论与展望 (8) 10参考文献 (9)
需求分析 汽车作为一种快速、灵活而经济的交通工具,普遍受到人们的关注。20世纪后半叶以来,汽车工业得到了迅速发展。国家积极推进汽车工业和消费,汽车进入寻常百姓家。但是汽车给我们带来方便的同时也带来了不少的问题,其中最主要的就是交通事故频繁发生,由此导致的人员伤亡和财产损失数目嘛人。据全球各交通和警察部门的统计:2003年全世界交通事故死亡人数为50万人,其中,中国交通事故死亡人数为l0.4万人,占世界交通事故死亡人数的20%还多,而美国、俄罗斯的死亡人数则分别为4万人和2.6万人;拿两个规模相当的城市比较,北京的交通事故致死率为14%,东京则为0.7%。在诸多交通事故中,由于驾驶员反应不及造成的交通事故占80%以上,汽车追尾事故占30%一40%,而追尾事故造成的损失和伤亡又占总损失的60%以上。据奔驰汽车公司的一项研究表明:驾驶员只要在有碰撞危险的0.5秒前得到预警,就可以避免至少60%的追尾撞车的事故,30%的迎面撞车事故和50%的路面相关事故;若在1秒前“预警”,则可避免90%的事故发生。中国正在成为全球最大的新兴市场,汽车保有量已突破2600万辆,年销售汽车将突破600万辆,未来5年将成为仅次于美国的全球第二大汽车销售国。而纵观世界汽车的数量则更是多得惊人,光是美国国内的汽车保有量就多达2亿多辆,并且世界每年还有成亿的新车涌向市场。如此巨大的汽车数量和汽车市场,加上极端残酷的车祸事故和悲惨后果,发展汽车安全技术刻不容缓。汽车安全技术主要分为主动安全和被动安全。被动安全是汽车上的一些安全设施,如安全带、安全气囊、保险杠等,它们主要是尽量减少交通事故和事故后人员直接受损害的程度,但是这种传统的针对冲撞后的乘员保护的技术和措施已经远远不能满足现代交通对汽车安全性的要求,而为以预防为核心的现代汽车主动安全技术已成为现代交通的迫切要求,先进的电子、通讯及信息等技术在汽车上的应用为特征的新一轮汽车技术革命恰恰为此提供了可能。特别是人工智能的研究成果使得汽车具有某种人的“智能”,能感知外界环境,能够自己“思考”主动采取措施,避免事故的发生,做到真正意义的主动安全。基于机器视觉的汽车辅助导航系统是智能汽车中最具研究价值的一项技术。它采用视觉传感器探测技术来对汽车行驶前方路况进行无间断、无疲劳的实时识别,对各种行驶状况进行分析和处理,并对各种危险情形做出相应的判断。当系统判断出车辆存在潜在的碰撞危险时,立即提前向驾驶者发出报警信号,以提醒驾驶者必须尽快做出相应的处理。
驾驶辅助系统 前言 驾驶辅助系统是当前国际智能交通系统研究的重要内容,它是利用机器视觉和传感器技术实现对驾驶员周围环境状况实时通报,并在本车可能发生潜在危险时及时警示驾驶员采取有效措施,消除事故隐患。 驾驶辅助系统有车道保持辅助系统、自动泊车辅助系统、刹车辅助系统、行车辅助系统、车辆红外线夜视辅助系统等。 1.车道保持辅助系统 车道保持辅助系统可以帮助司机将车辆保持在原车道上行驶。借助一个摄像头识别行驶车道的标志线。如果车辆接近识别到的标记线并可能脱离行驶车道,系统会通过方向盘的振动提醒驾驶员注意。如果车道保持辅助系统识别到本车道两侧的标记线,系统处于待命状态。如果在车辆横过车道边界线之前拨动了转向灯,系统就不会给出振动提醒,因为系统认为这是驾驶员需要变道。在接近或者横过识别出的车道边界线时,会产生振动,并且这种振动提醒只发生一次。车道保持辅助系统是为高速公路和主干线公路而设计的,所以该系统在车速高于约65km/h时才会工作。环境条件恶劣时,比如车道脏污或者覆盖着雪、车道过窄、车道边界线不清晰(如高速公路施工时)该系统暂时会不工作,系统当前的工作状态会显示在组合仪表上。 2.自动泊车辅助系统 倒车辅助系统以图像、声音的直观形式告知驾驶者车与障碍物的相对位置,解除因后视镜存在盲区带来的困扰,从而为驾驶者倒车泊车提供方便,消除安全隐患。按所使用的传感器不同,倒车辅助系统可分为红外线式、电磁感应式和超声波式。红外线式的最大缺点是红外线易受干扰,对深黑色粗糙表面物体的反应不灵敏。并且,如果红外线发射器或接收器表面被一层薄薄的冰雪或泥尘覆盖,系统就会失效。电磁感应式的倒车辅助系统其检测稳定性和灵敏度比红外线提高许多,其缺点是只能动态检测障碍物。超声波与机器视觉配合式的倒车辅助系统使用超声波传感器检测障碍物,并能结合摄像头自动识别停车线,当汽车自动检测好停车位置和距离时,只要驾驶者按下确认键,该系统就会自动泊车。 自动泊车辅助系统的基本原理是通过车身前后和侧面的多个传感器,来测算车位的大小、距离以及准确的入位角度。系统对车辆和车位都有要求:首先车辆必须装有倒车影像功能的屏幕,其次,在停车时,车位的大小不应小于车身总长加2米的长度,而倒车时,与旁边车辆的横向距离应该保持在0.5-1.5 m之间。选择好车位就可以泊车。将车摆放好挂入倒档后,倒车影像屏幕会自动显示出你所在的位置和周围环境,这时用户在触摸屏式导航仪上,通过移动光标来设定泊车的目标位置,同时启动智能泊车系统。系统一旦启动会自行旋转转向盘,然后缓慢进行倒车,最后将车辆停在泊车位置附近。驾驶者可以在注意周围有无障碍物的同时,控制油门或制动调整泊车过程。目前,自动泊车系统还存在一些局限,随着技术不断改进,将对泊车起始点的要求减弱,车位侦测速度和精度得到提高,泊车过程运行更加平稳快捷等。 3.制动辅助系统 制动主要包括电磁制动,电子液压制动,电子机械制动。制动系统的技术有:EBA
2017年汽车驾驶智能辅助系统建设项目可行性 研究报告 一、项目概况 (2) 二、项目实施的必要性 (2) 三、项目实施的可行性 (3) 四、项目投资具体安排 (4) 1、项目投资估算 (4) 2、工艺流程与核心技术 (6) (1)摄像头生产工艺流程 (6) (2)电子控制单元主板的生产工艺流程 (7) (3)系统总成的生产工艺流程 (7) 3、主要设备选择 (7) 4、主要原材料、辅助材料及动力供应情况 (7) 5、项目建设地点及土地占用情况 (8) 6、环保情况 (8) 7、项目经济效益分析 (9) 8、项目实施进展及达产情况 (10)
一、项目概况 高级驾驶辅助系统(ADAS)功能一般包含:车道偏离报警系统、360度全景泊车影像系统、夜视辅助系统、自适应巡航控制、驾驶员疲劳监控系统、车道保持辅助系统、倒车智能后视系统等。本项目将在原有技术和产品积累的基础上,充分发挥新产品自主研发能力和创新技术能力,进行产业链延伸,使公司着力向汽车人机交互系统集成商的方向发展,直接进入终端市场平台。项目实施后可有效满足市场的需求,打破跨国汽车电子企业及其合资企业高级驾驶辅助系统产品对市场的垄断,开拓并抢占国外市场。 二、项目实施的必要性 近年来,我国汽车电子产业面临良好的政策环境,《汽车产业调整和振兴规划》以及《电子信息产业调整与振兴规划》等政策的出台,都对汽车电子等关键零部件实现自主化、产业化做了详细规定。《汽车产业调整与振兴规划》明确提出要大力发展汽车电子产业。国际方面,随着全球经济的逐渐复苏,国外汽车产销量逐步回升,电子信息产品逐渐步入正轨,预计未来几年仍将保持持续快速增长。国内方面,中国的汽车产业已成为我国发展最快的产业之一,产销量增速大幅提升。我国汽车整车配套的增长、出口的拉动以及汽车保有量增加带来的汽车电子修理更换的需求等,使得汽车电子企业面临着广阔的发展空间。
文章编号:1002O0268(2007)07O0107O05 智能车辆安全辅助驾驶技术研究近况 基金项目:国家自然科学基金资助项目(50175046) 作者简介:王荣本(1946-),男,教授,博士生导师, 研究方向为智能车辆、汽车安全辅助驾驶、物流自动化 王荣本,郭烈,金立生,顾柏园,余天洪 (吉林大学交通学院,吉林长春 130025) 摘要:论述了安全辅助驾驶技术的研究现状、研究的必要性以及研究进展。安全辅助驾驶技术包括车道偏离预警与保持、前方车辆探测及安全车距保持、行人检测、驾驶员行为监测、车辆运动控制与通讯等。分析了各种传感器的优缺点及其在实际应用过程中存在的问题,基于单一传感器不能很好地解决安全辅助驾驶技术可靠性和环境适应能力的要求,应结合激光雷达技术解决图像模糊问题,利用红外传感器增强机器视觉识别的可靠性,未来的安全辅助驾驶技术应该采取多种传感器融合的技术,结合毫米波雷达和激光雷达系统具有深度测量精确的特点,将极大的推动汽车安全辅助驾驶系统的应用和推广。 关键词:智能交通系统;安全辅助驾驶;车道偏离预警;行人检测;车间通讯中图分类 号:U491 文献标识码:A ReviewontheResearchofIntelligentVehicleSafetyDrivingAssistantTechnology WANGRongOben,GUOLie,JINLiOsheng,GUBaiOyuan,YUTianOhong (SchoolofTransportation,JilinUniversity,Jilin Changchun 130025,China) Abstract:Thepresentresearchstatus,necessityandprogressonsafetydrivingassistanttechnologyaredi scussed1Thesafetydrivingassistanttechnologyincludeslanedeparturewarning,precedingvehicledet ectionandsafedistancemaintainingbetweenvehicles,pedestriandetection,driverbehaviormonitorin g,vehiclemotioncontrolandinterOvehiclecommunications1Theadvantagesanddisadvantagesofdiff erenttypeofsensorsandtheproblemsthatexistedinthepracticalapplicationarerepresented1Thesingl esensorsolutioncannotmeettherequirementofreliabilityandadaptabilitytodifferentcircumstance,s othelaserandradartechnologyarecombinedtosolvetheblurredimageproblem,theinfraredsensorisus edtoenhancethereliabilityofmachinevisionrecognition1Thefuturesafetydrivingassistanttechnology shouldadoptmultiplesensorsfusiontechnology,associatedwiththecharacteristicthatmillimeterOwa veradarandlaserradarsystemarepreciseindepthmeasurement,topromotetheapplicationandimprov ementofthesafetydrivingassistantsystem1 Keywords:IntelligentTransportSystems;safetysdrivingassistant;lanedeparturewarning;pedestriand etection;interOvehiclecommunication 引言 智能车辆是利用传感器技术、信号处理技术、通讯技术、计算机技术等,辨识车辆所处的环境和状态,根据各传感器所得到的信息做出分析和判断,或者给司机发出劝告和报警信息,提 请司机注意规避危险;并能在紧急情况下,帮助司机操作车辆(即辅助驾驶),防止事故的发生。早期智能车辆研究主要集中在如何采用各种传感器技术实现车辆全自动化无人驾驶,随着研究的深入,重点着眼于提高汽车的安全性、舒适性以及提供优良的人车交互界面,并努力向市场推广智能车辆相关技术的应用。 1998年美国运输部认为日益严重的交通事故是最迫切需要解决的问题,开始组织实施智能车辆先导IVI(IntelligentVehicleInitiative)计划。该计划的基本宗旨和目标是预防交通事故及其引起的人员伤亡,提高安全性,并以人为因素为基础,防止驾驶员精神分散,促进防撞系统的推广
ADAS (高级驾驶辅助系统) 高级驾驶辅助系统(Advanced Driver Assistant System ),简称ADAS ,是利用安装于车上的各式各样的传感器,在第一时间收集车内外的环境数据,进行静、动态物体的辨识、侦测与追踪等技术上的处理,从而能够让驾驶者在最快的时间察觉可能发生的危险, 以引起注意和提高安全性的主动安全技术。ADAS 采用的传感器主要有摄像头、雷达、激 光和超声波等,可以探测光、热、压力或其它用于监测汽车状态的变量,通常位于车辆的前后保险杠、侧视镜、驾驶杆内部或者挡风玻璃上。早期的ADAS 技术主要以被动式报警 为主,当车辆检测到潜在危险时,会发出警报提醒驾车者注意异常的车辆或道路情况。对 于最新的ADAS 技术来说,主动式干预也很常见。ADAS 通常包括以下17 种用与汽车驾驶辅助的系统: 1、导航:导航是一个研究领域,重点是监测和控制工艺或车辆从一个地方移动到另一 个地方的过程。导航领域包括四个一般类别:陆地导航,海洋导航,航空导航和空间导航。 2、时交通系统TMC :TMC 是是欧洲的辅助GPS 导航的功能系统。它是通过RDS 方式发送实时交通信息和天气状况的一种开放式数据应用。借助于具有TMC 功能的导航系统,数据信息可以被接收并解码,然后以用户语言或可视化的方式将和当前旅行路线相关的信息 展现给驾驶者。 3、电子警察系统ISA :我国道路交通管理系统中的“电子警察”是随着科技的发展而 产生的,是一个时代的产物。它作为现代道路交通安全管理的有效手段,可以迅速地监控、 抓拍、处理交通违章事件,迅速地获取违章证据,提供行之有效的监测手段,为改善城市交
(19)中华人民共和国国家知识产权局 (12)实用新型专利 (10)授权公告号 (45)授权公告日 (21)申请号 201920474167.X (22)申请日 2019.04.10 (73)专利权人 山西大学商务学院 地址 030031 山西省太原市小店区太榆路 16公里处山西大学商务学院信息学院 (72)发明人 王文晶 柳欣 (74)专利代理机构 北京元本知识产权代理事务 所 11308 代理人 岳秀梅 (51)Int.Cl. B60Q 9/00(2006.01) B60R 16/023(2006.01) (54)实用新型名称 基于人工智能的车辆安全驾驶辅助系统 (57)摘要 本实用新型公开了一种基于人工智能的车 辆安全驾驶辅助系统,包括:车载安全驾驶辅助 装置、服务器;其中,所述车载安全驾驶辅助装置 包括行驶环境感知装置、无线通信装置、智能处 理器、辅助控制器、提示报警器。采用本实用新型 可以实现区域内车辆间的实时数据共享,并达到 主动预测危险并消除危险的目的,从而避免一系 列潜在危险的发生,对于降低交通事故率、提高 汽车的安全性能具有重要意义。权利要求书1页 说明书3页 附图1页CN 209987828 U 2020.01.24 C N 209987828 U
权 利 要 求 书1/1页CN 209987828 U 1.一种基于人工智能的车辆安全驾驶辅助系统,其特征在于,包括: 车载安全驾驶辅助装置、服务器;其中,所述车载安全驾驶辅助装置包括行驶环境感知装置、无线通信装置、智能处理器、辅助控制器、提示报警器;所述行驶环境感知装置、所述无线通信装置、所述辅助控制器、所述提示报警器均与所述智能处理器相互连接; 其中,所述行驶环境感知装置用于识别本车在行驶过程中的周围环境情况;所述无线通信装置用于本车与其他车辆以及所述服务器之间进行无线通信;所述行驶环境感知装置将采集到的信息输出至智能处理器,无线通信装置将接收到的信息输出至智能处理器;所述智能处理器对来自所述行驶环境感知装置以及所述无线通信装置的信息进行处理并输出控制信号至所述辅助控制器;所述辅助控制器根据智能处理后输出的控制信号实现车辆的驾驶操作控制;同时,所述智能处理器输出提示报警信号至提示报警器,对驾驶员进行警示提醒。 2.根据权利要求1所述的基于人工智能的车辆安全驾驶辅助系统,其特征在于, 所述服务器设置在道路交通枢纽处;所述服务器中包含无线通信装置;所述服务器构成了基于无线通信的协调节点;由所述服务器创建实时网络,协调节点通信范围内的车辆通过车载安全驾驶辅助装置的无线通信装置加入该实时网络,从而组成网状通信拓扑结构,实现实时网络内数据的共享;所述实时网络内的任一车辆均能实时接收到网内其他车辆的行驶状态信息;所述行驶状态信息包括实时速度值、动态刹车距离值和车身坐标。 3.根据权利要求2所述的基于人工智能的车辆安全驾驶辅助系统,其特征在于, 其中,所述行驶环境感知装置包括前置摄像头、后置摄像头、雷达、速度传感器、GPS坐标定位器;所述前置摄像头及后置摄像头用于采集车辆周围环境的图像信息,包括车道线、交通标志、车辆、行人的图像信息;所述速度传感器采集本车的事实速度;所述雷达采集本车与前车之间的距离;所述GPS坐标定位器提供本车的车身坐标。 4.根据权利要求3所述的基于人工智能的车辆安全驾驶辅助系统,其特征在于, 所述行驶环境感知装置采集本车的转向信息、油门信息、动态刹车距离值;所述行驶环境感知装置包括存储器,所述存储器存储有本车的长度、宽度、高度、离地间隙、前后轮距、轮胎位置信息、GPS差分补偿信息、车辆刹车距离对照表。 5.根据权利要求1-4任一项所述的基于人工智能的车辆安全驾驶辅助系统,其特征在于, 所述车辆的驾驶操作控制包括车速调整、车距调整、换道、超车、泊车。 2