2017年 第62卷 第7期:635 ~ 649
引用格式: 蔡依晨, 黄维, 董晓臣. 可穿戴式柔性电子应变传感器. 科学通报, 2017, 62: 635–649
Cai Y C, Huang W, Dong X C. Wearable and flexible electronic strain sensor (in Chinese). Chin Sci Bull, 2017, 62: 635–649, doi: 10.1360/N972015-01445 ? 2016《中国科学》杂志社
https://www.doczj.com/doc/555686772.html, https://www.doczj.com/doc/555686772.html,
《中国科学》杂志社
SCIENCE CHINA PRESS
自然科学基金项目进展专栏
评 述
可穿戴式柔性电子应变传感器
蔡依晨1,2, 黄维1,2*, 董晓臣1,2*
1. 南京工业大学, 江苏省柔性电子重点实验室, 南京 211816;
2. 南京工业大学海外人才缓冲基地(先进材料研究院), 国家级“江苏先进生物与化学制造协同创新中心”柔性电子研究部, 南京 211816 * 联系人, E-mail: iamxcdong@https://www.doczj.com/doc/555686772.html,; iamwhuang@https://www.doczj.com/doc/555686772.html, 2016-09-29收稿, 2016-10-20修回, 2016-10-22接受, 2016-12-30网络版发表
国家杰出青年科学基金(61525402)和国家重点基础研究发展计划(2014CB660808)资助
摘要 传统的电子应变传感器大多基于金属和半导体材料, 其便携性、柔韧性和可穿戴特性差. 随着柔性电子材料和传感技术的快速发展, 柔性应变传感器在电子皮肤和机器人等领域的应用引起人们越来越广泛的关注. 由于生物相容性好, 同时兼具可穿戴性、实时监测、非侵入式等一系列优点, 高弹性和可拉伸性应变传感器的开发逐渐成为研究热点. 本文综述了近年来可穿戴式柔性电子应变传感在材料发展、传感机理、集成输出及潜在应用等方面的研究进展, 对可穿戴式柔性电子传感器所面临的挑战做了简单讨论, 提出了一系列可能的优化及解决方案, 并对其未来的发展方向进行了展望.
关键词 可穿戴式, 柔性电子, 应变传感, 电子器件
近年来, 柔性电子应变传感器件的发展非常迅速, 可以用来检测各种人体生理活动, 包括较大幅度的手、胳膊和腿的弯曲移动以及较小幅度的呼吸、吞咽、发声时肌肉震动、血压和眼压等[1,2]. 可穿戴电子传感器以信号传导的形式将生理活动信号转换为可视的电信号, 在人体临床诊断、健康评估、健康监控、虚拟电子、柔性触摸屏、柔性电子皮肤, 甚至工业机器人等领域[3~5]拥有很大的应用潜力.
传统的应变电子传感器件大多基于金属和半导体材料[6~8], 其拉伸性和敏感性受到很大限制, 不适用于检测人体活动. 与传统的电子应变传感检测器相比, 柔性电子应变传感器克服了易脆的缺点, 并且具较好的生物相容性、可拉伸性、透明性及可穿戴性和连续检测等优势[9,10]. 目前报道的柔性电子应变传感器常用的材料包括: 纳米粒子、纳米线、碳纳米管、石墨烯和有机材料等, 其中基于有机材料的柔性电子应变传感器的发展最为迅速, 在敏感性方面甚至
可以和人体的皮肤相媲美[11~13]. 因此, 通过将柔性电子器件集成并形成活性感知矩阵可以用于制备电子皮肤, 甚至包括人工智能机器人、仿生假体、人机互动系统等更多的人造智能系统.
在柔性电子传感众多应用中, 研究最为广泛的是电子皮肤. 然而人类的皮肤是一个非常敏感的器官, 它具有集成化、可伸缩的网络传感功能, 能够将外界的温度、湿度和触觉等刺激信号传递到大脑并接收大脑发送的指令做出反馈, 使我们能够避开危险或感受环境变化. 人们期待将柔性电子传感技术用于可穿戴式电子皮肤并期望其可以像人的皮肤一样感受外界的温度、压力、形变或纹理等复杂信号, 并且通过电子皮肤将外界刺激转化为可传输的电信号来输出甚至传达大脑的命令[14~16]. 为了模拟人类皮肤的功能, 常用的方法是通过柔性电子传感器的多功能化来提高自身性能, 例如: 结合化学和物理传感特性、提高生物降解性、增加自供电能力等, 通过不
2017年3月 第62卷 第7期
636
断的完善和发展提高其实际应用潜力, 进而制备可穿戴的电子皮肤. 近年来, 柔性电子传感器的应用越来越广泛, 例如自主人工机器人技术, 赋予了机器人特殊的接收和发射信号的能力, 达到了照顾年老体弱人群的目标; 通过物理和化学修饰制备的多功能电子传感器可以应用于电子鼻、电子眼等, 实现对温度、湿度、压力等外界刺激的监控; 将电子传感集成化和模块化制备而成了电子芯片, 并将其用于电子触摸屏和智能手环等. 柔性电子应变传感器的发展非常迅速, 更多的功能和实际应用还需要更进一步的研究和探索. 下面分别从柔性电子应变材料、传感机理、器件集成及可穿戴式电子传感的应用等方面对柔性应变电子传感器的发展进行了总结和比较.
1 柔性电子应变传感材料
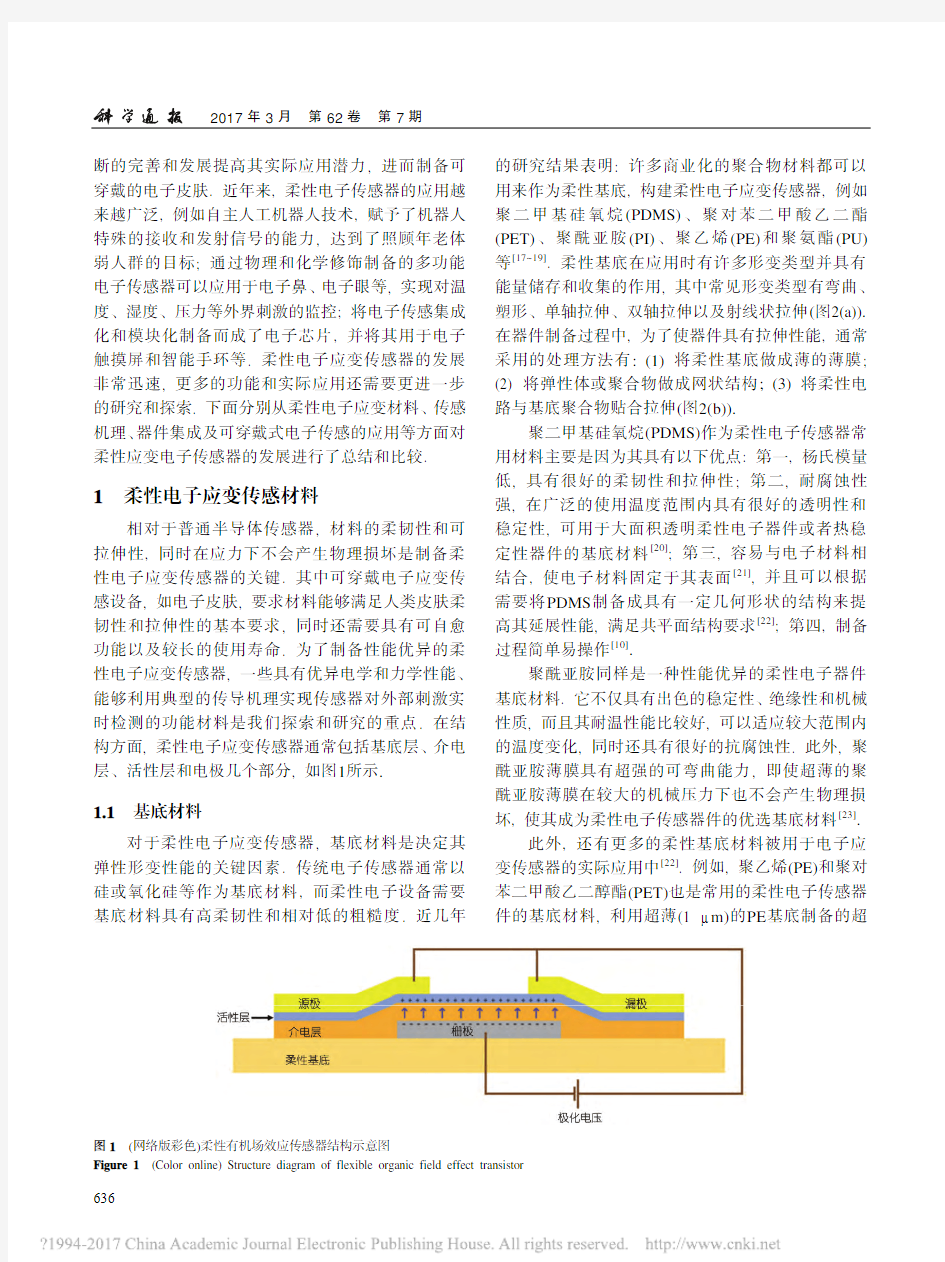
相对于普通半导体传感器, 材料的柔韧性和可拉伸性, 同时在应力下不会产生物理损坏是制备柔性电子应变传感器的关键. 其中可穿戴电子应变传感设备, 如电子皮肤, 要求材料能够满足人类皮肤柔韧性和拉伸性的基本要求, 同时还需要具有可自愈功能以及较长的使用寿命. 为了制备性能优异的柔性电子应变传感器, 一些具有优异电学和力学性能、能够利用典型的传导机理实现传感器对外部刺激实时检测的功能材料是我们探索和研究的重点. 在结构方面, 柔性电子应变传感器通常包括基底层、介电层、活性层和电极几个部分, 如图1所示.
1.1 基底材料
对于柔性电子应变传感器, 基底材料是决定其弹性形变性能的关键因素. 传统电子传感器通常以硅或氧化硅等作为基底材料, 而柔性电子设备需要基底材料具有高柔韧性和相对低的粗糙度. 近几年
的研究结果表明: 许多商业化的聚合物材料都可以用来作为柔性基底, 构建柔性电子应变传感器, 例如聚二甲基硅氧烷(PDMS)、聚对苯二甲酸乙二酯(PET)、聚酰亚胺(PI)、聚乙烯(PE)和聚氨酯(PU)等[17~19]. 柔性基底在应用时有许多形变类型并具有能量储存和收集的作用, 其中常见形变类型有弯曲、塑形、单轴拉伸、双轴拉伸以及射线状拉伸(图2(a)). 在器件制备过程中, 为了使器件具有拉伸性能, 通常采用的处理方法有: (1) 将柔性基底做成薄的薄膜; (2) 将弹性体或聚合物做成网状结构; (3) 将柔性电路与基底聚合物贴合拉伸(图2(b)).
聚二甲基硅氧烷(PDMS)作为柔性电子传感器常用材料主要是因为其具有以下优点: 第一, 杨氏模量低, 具有很好的柔韧性和拉伸性; 第二, 耐腐蚀性强, 在广泛的使用温度范围内具有很好的透明性和稳定性, 可用于大面积透明柔性电子器件或者热稳定性器件的基底材料[20]; 第三, 容易与电子材料相结合, 使电子材料固定于其表面[21], 并且可以根据需要将PDMS 制备成具有一定几何形状的结构来提高其延展性能, 满足共平面结构要求[22]; 第四, 制备过程简单易操作[10].
聚酰亚胺同样是一种性能优异的柔性电子器件基底材料. 它不仅具有出色的稳定性、绝缘性和机械性质, 而且其耐温性能比较好, 可以适应较大范围内的温度变化, 同时还具有很好的抗腐蚀性. 此外, 聚酰亚胺薄膜具有超强的可弯曲能力, 即使超薄的聚酰亚胺薄膜在较大的机械压力下也不会产生物理损坏, 使其成为柔性电子传感器件的优选基底材料[23].
此外, 还有更多的柔性基底材料被用于电子应
变传感器的实际应用中
[22]
. 例如, 聚乙烯(PE)和聚对苯二甲酸乙二醇酯(PET)也是常用的柔性电子传感器件的基底材料, 利用超薄(1 m)的PE 基底制备的超
图1 (网络版彩色)柔性有机场效应传感器结构示意图
Figure 1 (Color online) Structure diagram of flexible organic field effect transistor
评
述
图2(网络版彩色) 柔性电子传感基底材料的形变(a)和应用类型示
意图(b)[19]
Figure 2(Color online) The schematic images of deformations (a) and
applications for flexible electronic sensors substrates (b). Images repro-
duced with permission from ref. [19]. Copyright ? 2012 Materials Re-
search Society
轻塑料电子传感器件可以将弯曲半径减少至5 μm,
并可以像纸张一样褶皱和重复弯曲[18].
1.2 介电材料
介电材料, 又称电介质, 是电的绝缘材料. 柔性
电子场效应晶体管的介电材料一般为传统的弹性材
料, 例如PDMS等[24]. 为了满足现代晶体管和电容式
触觉传感器可拉伸需求, 开发具备较高介电常数(k)、
较低漏电流、更高偶极密度、更大电流密度、更大能
量密度和快速放电以及较低损耗的介电材料, 进而
将这些材料通过旋、喷涂或浸涂等方式制备成为柔性
电子器件的介电层成为研究热点. 目前, 获得具有高
介电常数的介电材料主要从以下三个角度出发: 一
是化学结构设计; 二是添加无机纳米粒子; 三是填
充导电材料. 典型的化学结构设计是利用聚合物链
修饰来增加其极性, 例如引入氰基[25]或者含氟基
团[26]. Shankar等人[27]总结了各种弹性体的介电常数,
发现有很多种无机纳米粒子可以作为高介电常数弹
性体填充材料料, 如二氧化钛[28]、铁电纳米粒子钛酸
钡(BaTiO3)[29]、金属纳米粒子类[30]导电填充物、导电
聚合物[31]以及碳纳米管[32]等. 通过添加填充材料,
可以使主体材料中的电子极化从而增加其介电常数.
离子凝胶是聚合物和离子液体的复合物, 当其形成
两层导电层时具有很高的电容, 而电容受介电层的
厚度影响较小, 受拉伸应变的影响较大, 因此也可以
作为拉伸应变传感的介电层材料[33].
1.3 活性材料
柔性电子应变传感器最重要的组成部分是活性
层, 而具有优异的机械性能和电子特性的活性材料
是决定活性层性能的关键, 常见的活性材料主要分
为以下三大类: 自身具有高导电能力材料、高弹性导
电复合材料和压电材料, 在不同的制备条件和制备
工艺下, 由各种类型活性材料制备的柔性应变传感器
通常表现出不同的传感性能. 下面将对最常见的几种
柔性应变传感器的活性材料进行详细阐述和说明.
(ⅰ) 碳纳米管基活性材料. 碳纳米管是一种由
石墨烯卷曲形成的一维碳基纳米材料, 具有优异的
导电和机械性能, 同时还具有很好的化学稳定性. 无
结构缺陷的碳纳米管具有非常高的电子传输能力,
其电子迁移率高达10000 cm2 V-1 s- 1[18], 因此, 碳纳米
管可以作为高性能柔性电子应变传感器的活性材料.
目前, 碳纳米管有多种制备方法, 已经可以实现
规模化和连续化, 这对于柔性电子应变传感器的构
建具有非常重要的意义. 在碳纳米管批量化合成基
础上, 大规模碳纳米管薄膜的制备通常利用操作简
单的溶液沉积法, 比较常用的包括真空抽滤法[34]、旋
涂法[35]、喷涂法[36]和喷墨打印等方法[37]. 在实际应
用中, 为了优化器件的性能, 还可以通过Langmuir-
Blodgett(LB)法[38]、机械剪切以及接触和卷曲打印技
术[39]等技术来大规模制备碳纳米管均匀分布的薄膜
或阵列, 改善电子的传输性能. Wang等人[40]将单壁
碳纳米管薄膜放置在两层柔性PDMS薄膜之间, 制备
了非常灵敏和稳定的三明治结构的柔性电子皮肤,
实现了对人体生理活动信号的灵敏检测(图3(a));
Sekitani等人[41]采用印刷的方法将单壁碳纳米管与橡
胶相结合, 制备了弹性导体并将其用于主动矩阵有机
发光二极管(图3(b)); Ryu等人[42]制备了可穿戴的碳纳
米管应变传感器, 其形变可达到900%, 在重复数万次
拉伸情况下其形变保持稳定, 并实现人体活动生理信
号的检测(图3(c)).
(ⅱ) 石墨烯基活性材料. 石墨烯是由单层碳原
子组成的蜂窝状晶格结构, 具有很好的光学性能、机
械性能、导热性能以及非常高的载流子迁移率
(~20000 cm2V-1s-1)[43], 是构建柔性电子应变传感
637
2017年3月 第62卷 第7期
638
图3 (网络版彩色)基于碳纳米管的柔性电子传感器. (a) 单壁碳纳米管薄膜和PDMS 复合的电子皮肤; (b) 印刷方法制备的弹性导体; (c) 基于碳纳米管纤维的柔性应变传感器[40~42]
Figure 3 (Color online) The schematic images of flexible electronic sensors based on carbon nanotubes. (a) A typical E-skin composed of SWNTs film and PDMS; (b) printable elastic conductors; (c) CNT-fiber based strain sensor. Images reproduced with permission from refs. [40–42]. Copyright ? 2013 WILEY-VCH; Copyright ? 2009 Macmillan Pub-lishers Limited; Copyright ? 2015 American Chemical Society
器最为理想的活性材料, 其常见的制备方法包括化学气相沉积法、外延生长法和化学剥离石墨法. 化学气相沉积法是在高温条件下将石墨烯生长在金属表面[44], 而外延生长法是将石墨烯外延生长于碳化硅表面[45], 通过这些方法可以制备大尺寸、
高质量的石墨烯薄膜. 然而, 在器件制备过程中需要将石墨烯薄膜转移到其他基底表面, 转移过程中通常会使石墨烯产生一定的结构缺陷或污染[46,47]. 为了制备大规模的石墨烯薄膜, 通常采用还原化学剥离氧化石墨烯制备石墨烯薄膜[48], 常见的还原方法包括化学还原[49]、
热还原[50]、光热还原[51]和电化学还原[52]等, 并将其作为柔性电子应变器件的活性材料. 近几年, 以石墨烯作为柔性电子应变传感器活性材料的研究越来越多, 如Hou 等人[53]将石墨烯薄膜作为应变传感器的活性层和电极制备了性能优异的柔性电子应变传感器(图4(a)). Yan 等人[1]将石墨烯和纳米纤维素复合, 通过真空抽滤的方法制备了高弹性压阻式应变传感器 (图4(b)). 此外, 石墨烯也可以作为半导体材料用于晶体管的制备, Sun 等人[54]制备了透明的石墨烯场效应晶体管应变传感器, 通过构建共平面栅极
几何结构使其具有较大的电容(图4(c)).
(ⅲ) 弹性复合结构活性材料. 虽然单纯的纳米材料, 如硅(Si)、氧化锌(ZnO)、砷化镓(GaAs)和硒化镉(CdSe)等, 可以作为柔性电子应变传感器件的活性材料[16], 但单纯纳米材料很难在宏观上集成为有序的阵列, 极大地限制了柔性电子应变传感器的尺寸. 为了使电子应变传感器能够在较大应变情况下保持较好的导电能力, 将弹性体(PDMS 、海绵、多孔材料)与导电材料(碳纳米管、石墨烯、碳黑、导电聚合物、金属纳米粒子、金属纳米线、导电石墨等)有机复合是一种有效途径. 由于弹性体复合结构优异的导电性能和较高的各向异性, 使其成为一类较为常用的活性材料[55~58]. 例如, Yao 等人[59]利用聚氨酯海绵作为弹性支架, 用氧化石墨烯填充并还原后制备了高性能的柔性应变电子传感器. Wang 等人[40]将单壁碳纳米管抽滤成超薄膜, 进而以PDMS 作为弹性层制备了超灵敏和高稳定的电子皮肤传感器, 实现对人体或动物生理信号的实时检测. 此外, 由于弹性复合结构具有响应速度快、可以自驱动操作等特点, 其在压电传感器方面也有很多的研究, 其中聚偏氟乙烯(PVDF)因其柔韧性优异和易加工的特点成为柔性电子应变传感器常用的材料[13], 而且P(VDF-TrFE)聚合物也是触觉传感最常用的压电共聚物材料[60]. 虽然无机材料与有机材料相比柔韧性较差, 但一些具有较好机械弹性的无机纳米线阵列, 如氧化锌、氧化铟、锗硅、砷化镓等, 也被广泛应用于电子应变传感器中[61].
1.4 电极材料
电极是柔性电子应变传感器中输入和导出电流的两个端极, 在器件制备过程中, 电极材料也是影响器件灵敏度和稳定性的重要因素. 在外力刺激下, 压阻式传感器的电极与电极之间以及电极与活性层之间的接触电阻发生变化, 并产生有效的电流输出信号, 所以制备传感器电极通常利用具有优异导电性能和机械性能的石墨烯、碳纳米管等碳材料以及柔性复合材料[62]. 例如, Wang 等人[40]制备了基于单壁碳纳米管电极的电子皮肤, 该器件表现出很好的检测灵敏性和较高的稳定性.
2 柔性电子应变传感器的传感机理
为了实现对触觉刺激的检测, 传感器需要将刺
评
述
图4(网络版彩色)基于石墨烯的柔性电子传感器. (a) 还原氧化石墨烯泡沫的SEM图片; (b) 可拉伸石墨烯薄膜制备过程; (c) 离子凝胶栅极共
平面石墨烯压力场效应晶体管[1,53,54]
Figure 4(Color online) The schematic illustrations and images of graphene based flexible electronic sensors. (a) Morphologies of the reduced gra-
phene oxide foam; (b) schematic fabrication processes for stretchable graphene nanopapers; (c) schematic of the pressure sensor based on GFETs with
an ion gel gate dielectric. Reproduced with permission from refs. [1,53,54]. Copyright ? 2014 WILEY-VCH; Copyright ? 2013 WILEY-VCH; Copy-
right ? 2014 WILEY-VCH
激信号转换为电信号等易于输出的形式, 常见的传
感转换方式主要有4种, 分别为压阻效应、电容效应、
压电效应、光学效应, 如图5所示. 为了制备具有综合
传感能力的传感单元, 灵敏度、检测极限、响应和恢
复时间以及工作电压等传感参数都可以作为评定传
感器性能优劣的重要参考指标. 如前文所述, 具有较
好电学性能的材料与特定的传感机理结合可以制备
具有不同性能的传感器件. 在此, 我们对柔性应变传
感在传感机理、材料、参数(灵敏度、检测极限、响
应和恢复时间以及工作电压)等做了总结和比较, 如
表1所示.
2.1 压阻效应
压阻式传感器是一种将外部刺激所引起的器件
材料电阻值变化转换为电信号输出的传感器. 压阻
式传感器具有结构简单、集成和输出数据容易等优
点, 也是目前研究最为广泛的一种电子应变传感器.
压阻式应变
传感器的电阻变化主要由以下几个因素引起:
图5(网络版彩色)传感机理示意图. (a) 压阻效应; (b) 电容效应; (c)
压电效应; (d) 光学效应[63]
Figure 5 (Color online)The schematic images of transduction mecha-
nisms. (a) Piezoresistive; (b) capacitance; (c) piezoelectric[63]; (d) optical
effect. Images (a), (b), (c) reproduced with permission from ref. [63].
Copyright ? 2015 The Royal Society of Chemistry
(1) 敏感元件几何结构的变化; (2) 半导体能带隙的
变化; (3) 两种材料之间接触电阻的变化; (4) 复合材
料中粒子间距的变化. 传感器中, 材料的电阻可以用
公式R=ρL/A表示, 其中, ρ为敏感材料的电阻率, L和
A分别代表材料的长度和面积. 当电阻率(ρ)为常数
639
2017年3月 第62卷 第7期
640
表1 应变传感器及其传感性能比较
Table 1 Strain sensor and the comparison of sensing performance
传感机理 材料
灵敏度 检测极限 响应/恢复时间
工作电压
压阻效应 Pt/纳米纤维[64]
11.35 μs kPa -1
5 Pa 50 ms –
压阻效应 薄纸/金纳米线[65]
1.14 kPa -1 13 Pa <17 ms 1.5 V
压阻效应 PDMS/SWNTs [40]
1.8 kPa -1 0.6 Pa <10 ms – 压阻效应 聚吡咯[66] 133.1 kPa -1 0.8 Pa 50 ms –
压阻效应 OLED/PSR [15] 42.7 Cd m -2 kPa -1 1 kPa 1 ms 10 V
压阻效应 PDMS/SWNTs [67] 0.23 kPa -1
50 kPa <125 ms
–
压阻效应 石墨烯[68] –
100 Pa 9 s 2.5 V
压阻效应 PDMS/PEDOT : PSS/PUD [69] 10.32 kPa -1 23 Pa
200 ms –
压阻效应 纳米线/PSR [70] 11.5 kPa -1 –
<0.1 s
5 V
电容效应 氧化铝陶瓷[11] 0.0035 kPa -1 100 kPa
– – 电容效应 氮化镓
[71]
0.0086 kPa -1
–
– –
电容效应 PS-b-P 2VP [72] 1.76 kPa -1 17 kPa –
50 V 电容效应 PDMS/红荧烯[73]
0.55 kPa -1 3 Pa
<10 ms 80 V 电容效应 PDMS/Pil 2TSi [10] 8.4 kPa -1 – <10 ms 100 V
压电效应 P(VDF-TrFE)[13] 2.3 kPa -1 –
0.17 s
– 压电效应 P(VDF-TrFE)[60] 1.1 V kPa -1
0.1 kPa – –
压电效应 P(VDF-TrFE)[74] –
13.3 Pa – 1 V
压电效应 PVDF [75] 2 V kPa -1
1 kPa – –
压电效应 P(VDF-TrFE)[76] –
200 kPa – 5 V 压电效应 钛酸盐/P(VDF-TrFE)[77] 6.7 ×10-4 kPa -1 200 kPa –
15 V 压电效应 氧化锌[16] 2.1 μS kPa -1 3.5 kPa 0.15 s
1 V
压电效应 聚丙烯
[78]
0.001 kPa -1 2 Pa –
– 光学效应
PDMS/OLEDs [79]
0.2 kPa -1
<1 kPa
300 ms
–
以材料电阻的变化主要由体积决定, 此时应变传感器的灵敏度可以用应变系数(GF )来表示, 应变系数可以用公式GF =d R /R 0d ε来表达, 其中R 0为不受应力时材料的初始电阻值, ε为受应力时材料的形变量, 传统的活性材料制备成本较低, 但拉伸性和稳定性具有局限性, 最大的拉伸形变一般只能达到5%, 因此, 基于几何体变化的的应变传感系数GF 约等于2[80]. 其中需要注意的是, 石墨烯、碳纳米管和硅材
料的电阻变化主要是由其能带带隙变化所导致的[81]. 2.2 电容效应
电容效应指因输电线距离遥远导致输电线上电容增大, 从而影响输电线传输性能的效应. 在电容式传感器中, 有机场效应晶体管(OFET)研究较为广泛, 典型的OFET 结构包括衬底、半导体层、栅极介电层、源极、漏极和栅极, 其中介电层放置在半导体层和栅
极之间. 当栅极施加脉冲电压时, 载流子会在介电层和有机层的界面之间形成一个导电通道, 然后电流在源漏极偏压条件下从源极向漏极流动[82,83]. 在工作过程中, 介电层作为一个电容器, 其电荷状态主要由栅极电压控制, 当外界施加压力于传感器时, 介电层的电容变化, 进而产生明显的电流信号变化输出.
电容器的电容可以用公式C =ε0εr A /d 表示, ε0是真空介电常数, εr 是相对介电常数, A 表示面积, 而d 表示电极之间的距离[84], 这3种变量对应力的变化都非常
敏感, 其中d 的变化通常用来测量正交力[85]. 电容式传感器的主要优势是它们的控制方程简单, 简化了器件的设计和分析过程. 通常电容式触觉传感器的灵敏度与弹性介电层有关, 利用高柔韧性和粘弹性的电介质可以提高传感器件的性能. 材料中的气穴能够使介电层产生弹性形变, 利用模板法使介电材料形成空气气穴, 增加电介质的可压缩性[85,86]; 同
评述
时, 由于空气介电常数比较低, 可以降低电容值而使得器件具有较低的信噪比和较高的灵敏度.
2.3 压电效应
压电效应即材料在外界机械压力作用下产生电压的能力. 压电式传感器具有较高的灵敏度和响应速度, 可用于检测声音的震动或脉搏的跳动等动态压力, 在电子皮肤等可穿戴式电子应变传感器件方面具有很大的应用潜力. 常见的无机压电材料主要有锆钛酸铅(PZT)[87]和氧化锌(ZnO)[88], 将无机纳米粒子分散于聚合物中可以使材料具有较好的机械柔韧性, 提高柔性电子传感器的性能[89]. 聚偏氟乙烯(PVDF)也是常用的压电聚合物, 与陶瓷相比其柔韧性更好, 压电应力常数(d33)更低, 在柔性触摸传感方面应用广泛[90]. 但是, 压电材料也有一定的缺点, 例如压电材料具有热电性, 当温度变化时材料内部会产生电荷, 若将其应用于压电触摸传感器方面容易使应变因素和温度变化发生混淆, 所以压电应变传感器在应用方面还需要进一步的探索和优化.
2.4 光学效应
光学效应是器件利用光作为媒介将触觉输入信号转换为电信号输出的过程. 目前, 利用光学效应的柔性电子传感设备越来越多, 例如, 智能手机和平板电脑中经常要用到光压传感器. 这些传感器件一般包括光源、传输介质和检测器几个部分, 通过应力敏感波导管或者柔性光纤来调整光的强度或波长[12]. 光学效应传感器与其他电子传感器相比具有特殊的优势, 例如, 电路连接简洁、具有优异的线性度并且偏移量小. 但是光学传感器也有一些缺点, 通常情况不能实现拉伸和扭转. 为了克服器件不可拉伸的缺陷性, 目前一般采用柔性波导管来制备器件, 例如, Ramuz研究团队[79]开发出一种基于PDMS的柔性光学压力传感, 具有可伸缩性和延展性. 器件波导管的一端安装发光二极管(LED), 另一端安装光电检测器, 器件具有很高的灵敏度, 压力灵敏度可达0.2 kPa, 并且可以区分30 mg的压力负载与移除. 此外, 为了提高器件检测灵敏度和范围, 一般采用大范围的LED阵列和有机光电检测器阵列测量通过波导管的输出光耦合. 随着形变发展, 弹性体表面覆盖的反射芯片方向发生变化, 光电检测器阵列接收到的光信号也随之改变, 最终通过输出电信号的变化达到检测加载于器件表面应力的大小.
2.5 其他效应
除了前面介绍的几种主要传感转换机理外, 还
有其他一些将触觉信号转为电信号输出的传感转换
机理, 例如无线触觉传感、摩擦生电传感等. 其中, 无
线触觉传感的主要原理是因为器件的维度可以确定
无线天线的频率, 在柔性基底上利用金属和碳纳米管
制备的无线天线[91], 当外界压力或拉伸等应变作用于
传感器时, 其谐振频率会发生变化, 从而实现对外界
刺激的检测. 摩擦生电传感器利用的是物理接触电荷
能够产生电压信号的机理, 这种传感器不需要外部供
能, 可以解决传感单元能量消耗的问题[92]. 在实际应
用方面, 这几种传感器还需要进一步的研究和拓展.
3 器件的集成与输出
为了赋予柔性电子传感器多功能测试的能力,
将一些简单、独立的敏感元件组合在一起, 形成传感
矩阵是制备对多种刺激信号同时具有响应的柔性电
子传感器的最常用方法. 例如, Gong等人[65]将表面
用金纳米线(AuNWs)修饰的棉纸夹在两片PDMS之
间, 利用这种夹层结构制备了可穿戴的压力传感, 实
现对压力、弯曲和扭转的区别检测, 如图6所示. 但是
该器件要区别不同类型和不同部位的输入信号仍有
较高的难度, 因此需要将特别的分析模块来提取和
分析不同的信息. 下面从阵列式传感、晶体管集成和
模块化设计几个方面详细阐述.
3.1 阵列式传感
单纯的单元传感器件在实际应用中具有一定的
局限, 无法实现大规模和多功能检测, 因此如何将大
量传感单元器件整合在一起形成传感单元矩阵是目
前柔性电子传感领域存在的一大挑战. 传感单元矩
阵最简单的输出策略是将每一个独立的传感单元分
别连接输出, 提高输出数据的准确度, 但是传感单元
阵列增大时, 连线较为复杂, 大大增加了传感单元阵
列的制作难度. 主动式矩阵每个像素点都有一个场
效应晶体管来输出像素, 可以获得较好的分辨率, 减
少数据连线的复杂性, 减轻传感单元串联的干扰并
降低能量损耗[93], 但主动式矩阵具有结构比较复杂,
设计和制作难度比较大的缺点. 被动式矩阵与主动
式矩阵不同, 它包括两套平行电极, 敏感单元在电极
641
2017
年
3月 第62卷 第7期
642
图6 (网络版彩色)金纳米线修饰的可穿戴压力传感器对不同类型机械力的检测性能. (a) 压力传感器件示意图; (b) 压缩; (c) 弯曲; (d) 扭转器件[65]
Figure 6 (Color online) Detection of different types of mechanical forces with a device modified by AuNWs. (a) Pressure sensor based on the AuNWs modified paper; (b) pressing; (c) bending and (d) torsion the sensor. Images reproduced with permission from ref. [65]. Copyright ? 2014, Macmillan Publishers Limited
垂直交叉处可以采用适当的输出机理使传感器输出信号较为准确[94], 但其同样具有输出数据速度慢的缺点. 为了克服敏感单元矩阵的连接复杂等缺点, 许多研究团队正致力于开发能够传输数据和能量的无线传感, 使敏感单元矩阵在现实生活中发挥更大的作用.
3.2 晶体管集成
应变传感器在实际应用中对集成电路提出了较高的要求. 总体来说, 柔性电子应变传感的集成主要是为了满足两个需求: 一是大面积传感用到的二维动态矩阵传感; 二是将有机场效应晶体管、有机发光二极管、太阳能电池、射频电感、电容器等与应变传感整合成一个单元, 实现其特殊应用. 例如压电材料和晶体管可以通过多种方法结合, 目前研究比较多的是有机场效应晶体管. 例如, 利用并五苯类材料的场效应晶体管对外界刺激具有较高灵敏度的特性, 当晶体管表面施加外界压力时, 源漏极的电流会随着施加压力的大小重复变化[95]. Bauer 和其合作者将独立的压电元件与栅极耦合在一起, 制备了柔性光热传感器, 可以自主设计信号的转入和输出机理. 此外,
外力响应变化也可以通过改变半导体的形态来调节, 通常具有较大晶粒尺寸的材料具有更高的敏感性[96]. 然而这一类传感器的缺点是反应时间比较长, 并且具有较大的滞后作用[95].
3.3 模块化设计
模块化设计就是将敏感单元阵列组装在一起, 使其成为一个更大的阵列, 在每个模块上添加计算能力, 使传感网络可以在内部自行处理信号或者分析数据[97], 因此模块化设计可以通过扩展传感网络来满足更多的实际应用[98]. 晶体管集成器件通过模块化设计可以减少输送至控制电脑的数据量, 达到调节信号的目的, 而且这种设计策略和人类皮肤相似, 由神经元簇收集刺激信号并输送至人脑[99], 对未来传感的发展具有非常重要的作用.
4 可穿戴式电子传感的发展
尽管不同柔性电子传感器具有不同的器件特性, 但他们在功能材料、器件结构、界面工程等方面都具有很多的相似之处. 若要将柔性电子应变传感器应用于实际生活中, 许多方面仍需要我们进一步的优
评述
化和拓展.
4.1 结构优化
电子应变传感器最基本的参数是检测灵敏度[66]. 为了提高传感器的检测灵敏度, 不同的器件结构和信号转换机理具有不同的优化方案. 对于电阻式传感器, 电阻包括三个部分: 电极电阻、界面接触电阻和压缩电阻. 接触电阻主要由接触面积决定, 为了提高传感器的检测灵敏度, 电极电阻和界面接触电阻的和要远小于压缩电阻, 并利用导电复合材料代替单纯的导电材料作为活性层. 另外, 基底材料的机械性质和结构对器件检测灵敏度也有很大的影响. 材料的机械性能由杨氏模量决定, 杨氏模量较小的材料, 如PDMS, 具有较好的柔韧性和拉伸性能, 成为柔性电子应变传感器优选的基底材料[19], 而最常用的器件结构是面对面结构, 当受到外界刺激时, 传感器对应的输出电流信号会发生变化. 对于电容式压力传感器, 电容由相对介电常数、电极面积和距离决定. 在应变刺激下, 传感器参数发生变化, 传感器发生响应. 其他例如将微结构橡胶电极和晶体管几何结构相结合也可以提高传感器的检测灵敏性; 集成电路晶体管同样在提高传感器检测灵敏度方面做出了突出贡献.
4.2 能源消耗
在实际应用中, 柔性电子传感中一个不容忽视的问题是能源消耗问题, 因此要求传感器件具有较低的操作电压和合适的电阻, 以实现降低能耗的目的.
对于电容式传感器件, 降低能耗主要是通过降低工作电压来实现, 并且在制备器件时要选用具有较高介电常数的活性材料. 目前, OFET的工作电压大部分都大于60 V, 所以降低器件工作电压、减少能源消耗显得尤为重要.
上述电子应变传感器的共同特点是都需要外部电源来产生电信号, 而自驱动器件, 如压电和摩擦生电电子器件, 将打破这一局限, 不仅可以实现高的检测灵敏度, 而且可以自身提供电量, 在实际应用中呈现出具大的发展潜力[100].
4.3 可穿戴电子传感器多功能化
除了特异性传感器能够检测单一外界信号, 可穿戴电子应变传感器需要具有多种功能并能够实现对外部信号的检测, 比如温度、压力、张力等. 例如,
自愈器件, 在受到外力破坏后能够自我恢复, 如果将
自愈材料和可穿戴电子传感器结合可以制备可恢复
的电子皮肤[55]. 除此之外, 因为在人体活动时, 往往
同时会发生包括切变、扭转、弯曲以及拉伸张力等在
内的很多应变, 这就对传感器提出了更高的要求, 需
要用于人体的电子应变传感器能够具有区别应力的
能力.
5 可穿戴式应变传感器的应用前景
可穿戴电子应变传感器具有多种传统电子器件所
不具备的优势, 例如成本较低、柔韧性好、透明度高、
质量轻、制备简单、生物相容性好以及多功能性等, 同
时由于柔性电子应变传感的各项性能, 使其在很多方
面都呈现出广阔的应用前景, 如图7所示[1,40,65,101~103].
5.1 柔性触摸传感器
柔性电子传感器的研究在很大程度上加速了电
子产品触摸传感器的发展, 在人工智能方面充当着
重要的角色, 在其他包括卫生保健、内科诊断、触控
显示器、智能手机和随身播放器等应用领域也被广泛
应用. 因此, 除了硅片和聚酰亚胺薄片[104], 大量关
于柔性电子的研究开始进行
, 可卷曲触控显示器、
可
图7(网络版彩色)柔性电子传感器潜在的应用领域[1,40,65,101~103]
Figure 7 (Color online) The promising applications of the flexible
electronic sensor[1,40,65,101–103]. (Images reproduced with permission from
refs. [1,40,65,101–103]. Copyright ? 2013, WILEY-VCH[40]; Copyright
? 2014, Macmillan Publishers Limited[65]; Copyright ? 2012, Macmil-
lan Publishers Limited[101]; Copyright ? 2013, WILEY-VCH[1]; Copy-
right ? 2015, American Chemical Society[102]; Copyright ? 2015,
American Association for the Advancement of Science[103])
643
2017年3月 第62卷 第7期
644
穿戴运动手环等相关产品已投入市场应用. 5.2 电子皮肤传感器
柔性压力传感器在人工智能方面也有广泛应用[105,106], 而模仿人类皮肤的触觉电子皮肤是人工智能的重要部分. 例如, Someya 等人[107]在2004年报道了以活性动态矩阵作为压力和温度传感器, 为增加器件的拉伸性能, 还将具有较好导电性和柔韧性的交联材料嵌入到器件中[22]. 而随着打印技术的进步, 弹性材料亦可以打印制备, 大大简化了器件制备过程和能耗. 最近, Wu 等人[16]以垂直取向的氧化锌(ZnO)纳米线制备了高密度的触觉传感器阵列, 利用拉伸条件下氧化锌纳米线产生压电的效应, 将压电电流作为栅极电信号, 在不再需要制备栅极, 只需要两个终端电极的情况下得到了具有检测灵敏度的电子皮肤传感器, 其检测压力灵敏度可达30 kPa 1.
5.3 可穿戴式健康监控器
医疗和卫生保健正引起人们越来越多的重视, 其中脉搏、血压和心跳的检测和监控是评估人体健康的重要手段, 因此开发可以高灵敏检测并记录反映人体健康状况基本信息的可穿戴式电子传感器至关重要. 目前, 许多可穿戴的电子设备已经实现了商业化, 例如智能手环, 可以实时监控人体心跳、脉搏、运动甚至睡眠等各项身体状况.
为了获得与心脏、大脑等不规则的器官均匀接触的电子器件, 使用柔性和机械顺从阵列单元是一种最为有效的途径. 例如, Viventi 等人[108]利用活性电极阵列构建了柔性电子应变传感器, 用来测量心脏和大脑的活动信号. 为了测量心电图信号, 文章中用2016个晶体管阵列在288个接触点处获得瞬间的分辨率, 实现了空间映射高分辨率信号的检测. 在此基础上, Kim 等人[109]也制备了具有收集温度、压力和物理刺激信号能力的多功能气泡式导管, 与发光LED 连接后其拉伸性能依然可以达到130%.
有机半导体传感器具有质量小、柔韧性好等优点, 可以用来制备高性能的可穿戴式电子设备; 碳纳米管、石墨烯等碳材料与聚二甲基硅氧烷(PDMS)等柔性高分子结合也是制备柔性应变电子传感器的理
想材料, 而且其生物相容性好, 可以实现较长时间(数天)的心电频率检测, 这些优势也大大加速了可穿戴柔性电子应变传感器的实际应用研究.
5.4 航天应用
随着电子印刷技术的发展, 柔性压力应变传感器亦可以通过电子印刷的方法制备, 使得柔性电子器件质量减轻、体积减小、能耗大大降低, 这对于航空应用的电子器件具有非常重要的意义. 航天飞机上超灵敏、大尺寸、集成化柔性传感能够不够测量温度、压力、湿度和pH 值的变化, 甚至对周围的气体成分都可以实现实时检测. 此外, 航天飞机上的柔性传感系统还可以实时检测油箱和太空站模块, 并对相应的变化发出危险警报. 然而获得性能可靠、可重复再生、结构复杂的集成柔性电子传感器仍然是柔性电子传感在实际应用中所面临的主要障碍. 例如, 基于有机场效应晶体管的柔性传感器材料便宜, 但是制备过程复杂, 工作电压高[20]; 基于纳米阵列的场效应晶体管具有好的稳定性, 但在柔性基底上制备成本昂贵, 步骤繁琐; 基于碳纳米管和石墨烯的柔性传感器虽然可以通过简单和低成本方法制备, 并且能够承受非常高的应变力, 但这种传感器与传统金属器件相比应变系数小, 不能用来检测较小的压力和应变.
6 结论与展望
柔性可穿戴电子应变传感器的发展非常迅速, 其在智能电子、机器人、临床诊断、健康监控、运动保健、安全设备、环境监控以及太空与航天等领域都拥有广泛的应用前景. 尽管如此, 柔性可穿戴电子应变传感器在实际应用方面还面临着以下巨大的挑战, 除了选择特殊的柔性基底材料和敏感的活性材料之外, 一些更高效的制备方法和器件结构也亟需探索, 以提高器件的检测灵敏度、检测限度、线性度和稳定性等性能. 因此, 目前关于可穿戴柔性应变传感器的研究主要集中在以下几个方面: 超灵敏器件、高性能自供能器件、透明几何结构器件以及具有特异检测功能器件. 柔性可穿戴及透明的超轻传感器的快速发展预示着可穿戴电子传感和智能系统的时代已经到来.
评述
参考文献
1Yan C, Wang J, Kang W, et al. Highly stretchable piezoresistive graphene-nanocellulose nanopaper for strain sensors. Adv Mater, 2014,
26: 2022–2027
2Wang Y, Wang L, Yang T, et al. Wearable and highly sensitive graphene strain sensors for human motion monitoring. Adv Funct Mater,
2014, 24: 4666–4670
3Tian H, Shu Y, Cui Y L, et al. Scalable fabrication of high-performance and flexible graphene strain sensors. Nanoscale, 2014, 6:
699–705
4Wang H, Cheng C, Zhang L, et al. Inkjet printing short-channel polymer transistors with high-performance and ultrahigh photorespon-
sivity. Adv Mater, 2014, 26: 4683–4689
5Lu Z H, Wang Q P, Lu H R, et al. New progress in flexible wearable electronics (in Chinese). Micronanoelectron Technol, 2014, 11:
685–691 [卢忠花, 王卿璞, 鲁海瑞, 等. 柔性可穿戴电子的新进展. 微纳电子技术, 2014, 11: 685–691]
6Yamada T, Hayamizu Y, Yamamoto Y, et al. A stretchable carbon nanotube strain sensor for human-motion detection. Nat Nanotechnol,
2011, 6: 296–301
7Hempel M, Nezich D, Kong J, et al. A novel class of strain gauges based on layered percolative films of 2D materials. Nano Lett, 2012,
12: 5714–5718
8Park W T, Mallon J R, Rastegar A J, et al. Review: Semiconductor piezoresistance for microsystems. Proc IEEE Inst Electr Electron Eng,
2009, 97: 513–552
9Di C A, Zhang F, Zhu D. Multi-functional integration of organic field-effect transistors (OFETs): Advances and perspectives. Adv Mater,
2013, 25: 313–330
10Schwartz G, Tee B C, Mei J, et al. Flexible polymer transistors with high pressure sensitivity for application in electronic skin and health
monitoring. Nat Commun, 2013, 4: 1859
11Tan Q, Li C, Xiong J, et al. A high temperature capacitive pressure sensor based on alumina ceramic for in situ measurement at 600 c.
Sensors, 2014, 14: 2417–2430
12Yun S, Park S, Park B, et al. Polymer-Waveguide-Based flexible tactile sensor array for dynamic response. Adv Mater, 2014, 26:
4474–4480
13Sharma T, Je S S, Gill B, et al. Patterning piezoelectric thin film PVDF-TrFE based pressure sensor for catheter application. Sensor Ac-
tuat A Phys, 2012, 177: 87–92
14Someya T, Kato Y, Sekitani T, et al. Conformable, flexible, large-area networks of pressure and thermal sensors with organic transistor
active matrixes. Proc Natl Acad Sci USA, 2005, 102: 12321–12325
15Wang C, Hwang D, Yu Z, et al. User-interactive electronic skin for instantaneous pressure visualization. Nat mater, 2013, 12: 899–904
16Wu W, Wen X, Wang Z L. Taxel-addressable matrix of vertical-nanowire piezotronic transistors for active and adaptive tactile imaging.
Science, 2013, 340: 952–957
17Kuribara K, Wang H, Uchiyama N, et al. Organic transistors with high thermal stability for medical applications. Nat Commun, 2012, 3:
723
18Kaltenbrunner M, Sekitani T, Reeder J, et al. An ultra-lightweight design for imperceptible plastic electronics. Nature, 2013, 499:
458–463
19Wagner S, Bauer S. Materials for stretchable electronics. Mrs Bull, 2012, 37: 207–213
20Sekitani T, Someya T. Stretchable, large-area organic electronics. Adv Mater, 2010, 22: 2228–2246
21Sun Y, Rogers J A. Structural forms of single crystal semiconductor nanoribbons for high-performance stretchable electronics. J Mater
Chem, 2007, 17: 832–840
22Sekitani T, Noguchi Y, Hata K, et al. A rubberlike stretchable active matrix using elastic conductors. Science, 2008, 321: 1468–1472
23Moon H, Seong H, Shin W C, et al. Synthesis of ultrathin polymer insulating layers by initiated chemical vapour deposition for
low-power soft electronics. Nat Mater, 2015, 14: 628–635
24Reese C, Chung W J, Ling M M, et al. High-performance microscale single-crystal transistors by lithography on an elastomer dielectric.
Appl Phys Lett, 2006, 89: 202108
25Jung K, Lee J, Cho M, et al. Development of enhanced synthetic elastomer for energy-efficient polymer actuators. Smart Mater Struct,
2007, 16: S288
26Chu B, Zhou X, Ren K, et al. A dielectric polymer with high electric energy density and fast discharge speed. Science, 2006, 313: 334–336
645
2017年3月 第62卷 第7期
646
27 Shankar R, Ghosh T K, Spontak R J. Dielectric elastomers as next-generation polymeric actuators. Soft Matter, 2007, 3: 1116–1129 28 Mc Carthy D, Risse S, Katekomol P, et al. The effect of dispersion on the increased relative permittivity of TiO 2/SEBS composites. J
Phys D Appl Phys, 2009, 42: 145406
29 Huang X, Xie L, Hu Z, et al. Influence of BaTiO 3 nanoparticles on dielectric, thermophysical and mechanical properties of eth-ylene-vinyl acetate elastomer/BaTiO 3 microcomposites. IEEE Trans Dielect Electr Insul, 2011, 18: 375–383
30 Kofod G, Risse S, Stoyanov H, et al. Broad-spectrum enhancement of polymer composite dielectric constant at ultralow volume fractions
of silica-supported copper nanoparticles. ACS Nano, 2011, 5: 1623–1629
31 Stoyanov H, Kollosche M, Mccarthy D N, et al. Molecular composites with enhanced energy density for electroactive polymers. J Mater
Chem, 2010, 20: 7558–7564
32 Galantini F, Bianchi S, Castelvetro V, et al. Functionalized carbon nanotubes as a filler for dielectric elastomer composites with im-proved actuation performance. Smart Mater Struct, 2013, 22: 055025
33 Lee K H, Kang M S, Zhang S, et al. “Cut and Stick” rubbery ion gels as high capacitance gate dielectrics. Adv Mater, 2012, 24:
4457–4462
34 Wu Z, Chen Z, Du X, et al. Transparent, conductive carbon nanotube films. Science, 2004, 305: 1273–1276
35 Opatkiewicz J P, Lemieux M C, Liu D, et al. Using nitrile functional groups to replace amines for solution-deposited single-walled car-bon nanotube network films. ACS Nano, 2012, 6: 4845–4853
36 Small W R. Inkjet Printing of transparent, electrically conducting single-walled carbon-nanotube composites. Small, 2007, 3: 1500–1503 37 Kang S J, Kocabas C, Ozel T, et al. High-performance electronics using dense, perfectly aligned arrays of single-walled carbon nano-tubes. Nat Nanotechnol, 2007, 2: 230–236
38 Li X, Zhang L, Wang X, et al. Langmuir-Blodgett assembly of densely aligned single-walled carbon nanotubes from bulk materials. J
Am Chem Soc, 2007, 129: 4890–4891
39 Cao Q, Rogers J A. Ultrathin films of single-walled carbon nanotubes for electronics and sensors: A review of fundamental and applied
aspects. Adv Mater, 2009, 21: 29–53
40 Wang X, Gu Y, Xiong Z, et al. Silk-Molded flexible, ultrasensitive, and highly stable electronic skin for monitoring human physiological
signals. Adv Mater, 2014, 26: 1336–1342
41 Sekitani T, Nakajima H, Maeda H, et al. Stretchable active-matrix organic light-emitting diode display using printable elastic conductors.
Nat Mater, 2009, 8: 494–499
42 Ryu S, Lee P, Chou J B, et al. Extremely elastic wearable carbon nanotube fiber strain sensor for monitoring of human motion. ACS
Nano, 2015, 9: 5929–5936
43 Novoselov K S, Geim A K, Morozov S, et al. Electric field effect in atomically thin carbon films. Science, 2004, 306: 666–669
44 Li X, Cai W, An J, et al. Large-area synthesis of high-quality and uniform graphene films on copper foils. Science, 2009, 324:
1312–1314
45 Hass J, De Heer W, Conrad E. The growth and morphology of epitaxial multilayer graphene. J Phys Condens Matter, 2008, 20: 323202 46 Pirkle A, Chan J, Venugopal A, et al. The effect of chemical residues on the physical and electrical properties of chemical vapor depos-ited graphene transferred to SiO 2. Appl Phys Lett, 2011, 99: 122108
47 Yu Q, Lian J, Siriponglert S, et al. Graphene segregated on Ni surfaces and transferred to insulators. Appl Phys Lett, 2008, 93: 113103 48 Hummers Jr W S, Offeman R E. Preparation of graphitic oxide. J Am Chem Soc, 1958, 80: 1339–1339
49 Li D, Mueller M B, Gilje S, et al. Processable aqueous dispersions of graphene nanosheets. Nat Nanotechnol, 2008, 3: 101–105 50 Zangmeister C D. Preparation and evaluation of graphite oxide reduced at 220 C. Chem Mater, 2010, 22: 5625–5629
51 Cote L J, Cruz-Silva R, Huang J. Flash reduction and patterning of graphite oxide and its polymer composite. J Am Chem Soc, 2009,
131: 11027–11032
52 Shao Y, Wang J, Engelhard M, et al. Facile and controllable electrochemical reduction of graphene oxide and its applications. J Mater
Chem, 2010, 20: 743–748
53 Hou C, Wang H, Zhang Q, et al. Highly conductive, flexible, and compressible all-graphene passive electronic skin for sensing human
touch. Adv Mater, 2014, 26: 5018–5024
54 Sun Q, Kim D H, Park S S, et al. Transparent, low-power pressure sensor matrix based on coplanar-gate graphene transistors. Adv Mater,
2014, 26: 4735–4740
55 Hammock M L, Chortos A, Tee B C K, et al. 25th anniversary article: The evolution of electronic skin (E-Skin): A brief history, design
considerations, and recent progress. Adv Mater, 2013, 25: 5997–6038
56 Liao X, Liao Q, Yan X, et al. Flexible and highly sensitive strain sensors fabricated by pencil drawn for wearable monitor. Adv Funct
Mater, 2015, 25: 2395–2401
评述
57Yao S, Zhu Y. Wearable multifunctional sensors using printed stretchable conductors made of silver nanowires. Nanoscale, 2014, 6:
2345–2352
58Gong S, Lai D T, Su B, et al. Highly stretchy black gold e-skin nanopatches as highly sensitive wearable biomedical sensors. Adv Elec
Mater, 2015, 1: 1400063
59Yao H B, Ge J, Wang C F, et al. A flexible and highly pressure-sensitive graphene-polyurethane sponge based on fractured microstruc-
ture design. Adv Mater, 2013, 25: 6692–6698
60Persano L, Dagdeviren C, Su Y, et al. High performance piezoelectric devices based on aligned arrays of nanofibers of poly (vinylidene-
fluoride-co-trifluoroethylene). Nat Commun, 2013, 4: 1633
61Liu X, Jiang L, Zou X, et al. Scalable integration of indium zinc oxide/photosensitive-nanowire composite thin-film transistors for
transparent multicolor photodetectors array. Adv Mater, 2014, 26: 2919–2924
62Kim S H, Song W, Jung M W, et al. Carbon nanotube and graphene hybrid thin film for transparent electrodes and field effect transistors.
Adv Mater, 2014, 26: 4247–4252
63Zang Y, Zhang F, Di C A, et al. Advances of flexible pressure sensors toward artificial intelligence and health care applications. Mater
Horiz, 2015, 2: 140–156
64Pang C, Lee G Y, Kim T I, et al. A flexible and highly sensitive strain-gauge sensor using reversible interlocking of nanofibres. Nat
Mater, 2012, 11: 795–801
65Gong S, Schwalb W, Wang Y, et al. A wearable and highly sensitive pressure sensor with ultrathin gold nanowires. Nat Commun, 2014,
5: 1–8
66Pan L, Chortos A, Yu G, et al. An ultra-sensitive resistive pressure sensor based on hollow-sphere microstructure induced elasticity in
conducting polymer film. Nat Commun, 2014, 5: 3002
67Lipomi D J, Vosgueritchian M, Tee B C, et al. Skin-like pressure and strain sensors based on transparent elastic films of carbon nano-
tubes. Nat Nanotechnol, 2011, 6: 788–792
68Zhu S E, Ghatkesar M K, Zhang C, et al. Graphene based piezoresistive pressure sensor. Appl Phys Lett, 2013, 102: 161904
69Choong C L, Shim M B, Lee B S, et al. Highly stretchable resistive pressure sensors using a conductive elastomeric composite on a mi-
cropyramid array. Adv Mater, 2014, 26: 3451–3458
70Takei K, Takahashi T, Ho J C, et al. Nanowire active-matrix circuitry for low-voltage macroscale artificial skin. Nat Mater, 2010, 9:
821–826
71Kang B, Kim J, Jang S, et al. Capacitance pressure sensor based on GaN high-electron-mobility transistor-on-Si membrane. Appl Phys
Lett, 2005, 86: 253502
72Kim J, Ng T N, Kim W S. Highly sensitive tactile sensors integrated with organic transistors. Appl Phys Lett, 2012, 101: 103308
73Mannsfeld S C, Tee B C, Stoltenberg R M, et al. Highly sensitive flexible pressure sensors with microstructured rubber dielectric layers.
Nat Mater, 2010, 9: 859–864
74Li C, Wu P M, Shutter L A, et al. Dual-mode operation of flexible piezoelectric polymer diaphragm for intracranial pressure measure-
ment. Appl Phys Lett, 2010, 96: 053502
75Joshi A B, Kalange A E, Bodas D, et al. Simulations of piezoelectric pressure sensor for radial artery pulse measurement. Mat Sci Eng B,
2010, 168: 250–253
76Trung T Q, Tien N T, Seol Y G, et al. Transparent and flexible organic field-effect transistor for multi-modal sensing. Org Electron,
2012, 13: 533–540
77Graz I, Krause M, Bauer-Gogonea S, et al. Flexible active-matrix cells with selectively poled bifunctional polymer-ceramic nanocompo-
site for pressure and temperature sensing skin. J Appl Phys, 2009, 106: 034503
78Buchberger G, Schw?diauer R, Bauer S. Flexible large area ferroelectret sensors for location sensitive touchpads. Appl Phys Lett, 2008,
92: 123511
79Ramuz M, Tee B C K, Tok J B H, et al. Transparent, optical, pressure-sensitive artificial skin for large-area stretchable electronics. Adv
Mater, 2012, 24: 3223–3227
80Witt G. The electromechanical properties of thin films and the thin film strain gauge. Thin Solid Films, 1974, 22: 133–156
81Bae S H, Lee Y, Sharma B K, et al. Graphene-based transparent strain sensor. Carbon, 2013, 51: 236–242
82Guo Y, Yu G, Liu Y. Functional organic field-effect transistors. Adv Mater, 2010, 22: 4427–4447
83Di C A, Liu Y, Yu G, et al. Interface engineering: An effective approach toward high-performance organic field-effect transistors. Ac-
counts Chem Res, 2009, 42: 1573–1583
84Puers R. Capacitive sensors: When and how to use them. Sensor Actuat A-Phys, 1993, 37: 93–105
85Dobrzynska J A, Gijs M A. Flexible polyimide-based force sensor. Sensor Actuat A-Phys, 2012, 173: 127–135
647
2017年3月 第62卷 第7期
648
86 Wong R D P, Posner J D, Santos V J. Flexible microfluidic normal force sensor skin for tactile feedback. Sensor Actuat A Phys, 2012,
179: 62–69
87 Panda P. Review: Environmental friendly lead-free piezoelectric materials. J Mater Sci, 2009, 44: 5049–5062
88 Zhao M H, Wang Z L, Mao S X. Piezoelectric characterization of individual zinc oxide nanobelt probed by piezoresponse force micro-scope. Nano Lett, 2004, 4: 587–590
89 Yamada T, Ueda T, Kitayama T. Piezoelectricity of a high-content lead zirconate titanate/polymer composite. J Appl Phys, 1982, 53:
4328–4332
90 Zhang X, Hillenbrand J, Sessler G. Improvement of piezoelectric activity of cellular polymers using a double-expansion process. J Phys
D Appl Phys, 2004, 37: 2146
91 Hage-Ali S, Tiercelin N, Coquet P, et al. A millimeter-wave inflatable frequency-agile elastomeric antenna. IEEE Antenn Wirel Prop
Lett, 2010, 9: 1131–1134
92 Zhu G, Yang W Q, Zhang T, et al. Self-powered, ultrasensitive, flexible tactile sensors based on contact electrification. Nano lett, 2014,
14: 3208–3213
93 Hsu Y J, Jia Z, Kymissis I. A locally amplified strain sensor based on a piezoelectric polymer and organic field-effect transistors. IEEE
Trans Electron Dev, 2011, 58: 910–917
94 Khan S, Lorenzelli L, Dahiya R S. Technologies for printing sensors and electronics over large flexible substrates: A review. Sens IEEE
J, 2015, 15: 3164–3185
95 Manunza I, Bonfiglio A. Pressure sensing using a completely flexible organic transistor. Biosens Bioelectron, 2007, 22: 2775–2779 96 Cosseddu P, Tiddia G, Milita S, et al. Continuous tuning of the mechanical sensitivity of pentacene OTFTs on flexible substrates: From
strain sensors to deformable transistors. Org Electron, 2013, 14: 206–211
97 Paradiso J A, Lifton J, Broxton M. Sensate media—multimodal electronic skins as dense sensor networks. Bt Technol J, 2004, 22: 32–44 98 Schmitz A, Maiolino P, Maggiali M, et al. Methods and technologies for the implementation of large-scale robot tactile sensors. IEEE
Trans Robot, 2011, 27: 389–400
99 Johansson R S, Flanagan J R. Coding and use of tactile signals from the fingertips in object manipulation tasks. Nat Rev Neurosci, 2009,
10: 345–359
100 Hwang B U, Lee J H, Trung T Q, et al. Transparent stretchable self-powered patchable sensor platform with ultrasensitive recognition of
human activities. Acs Nano, 2015, 9: 8801–8810
101 Tee B C, Wang C, Allen R, et al. An electrically and mechanically self-healing composite with pressure-and flexion-sensitive properties
for electronic skin applications. Nat Nanotechnol, 2012, 7: 825–832
102 Park H, Jeong Y R, Yun J, et al. Stretchable array of highly sensitive pressure sensors consisting of polyaniline nanofibers and au-coated
polydimethylsiloxane micropillars. Acs Nano, 2015, 9: 9974–9985
103 Park S I, Xiong Y, Kim R H, et al. Printed assemblies of inorganic light-emitting diodes for deformable and semitransparent displays.
Science, 2009, 325: 977–981
104 Ho C M, Tai Y C. Micro-electro-mechanical-systems (MEMS) and fluid flows. Annu Rev Fluid Mech, 1998, 30: 579–612
105 Tien N T, Jeon S, Kim D I, et al. A flexible bimodal sensor array for simultaneous sensing of pressure and temperature. Adv Mater, 2014,
26: 796–804
106 Campana A, Cramer T, Simon D T, et al. Electrocardiographic recording with conformable organic electrochemical transistor fabricated
on resorbable bioscaffold. Adv Mater, 2014, 26: 3874–3878
107 Someya T, Sekitani T, Iba S, et al. A large-area, flexible pressure sensor matrix with organic field-effect transistors for artificial skin
applications. Proc Natl Acad Sci USA, 2004, 101: 9966–9970
108 Viventi J, Kim D H, Moss J D, et al. A conformal, bio-interfaced class of silicon electronics for mapping cardiac electrophysiology. Sci
Transl Med, 2010, 2: 24ra22
109 Kim D H, Lu N, Ghaffari R, et al. Materials for multifunctional balloon catheters with capabilities in cardiac electrophysiological map-ping and ablation therapy. Nat Mater, 2011, 10: 316–323
评述
Summary for “可穿戴式柔性电子应变传感器”
Wearable and flexible electronic strain sensor
CAI YiChen1,2, HUANG Wei1,2* & DONG XiaoChen1,2*
1Nanjing Tech University (NanjingTech), Key Laboratory of Flexible Electronics (KLOFE), Nanjing 211816, China;
2Institute of Advanced Materials (IAM), Jiangsu National Synergetic Innovation Center for Advanced Materials (SICAM), Nanjing 211816, China
*Corresponding authors, E-mail: iamxcdong@https://www.doczj.com/doc/555686772.html,; iamwhuang@https://www.doczj.com/doc/555686772.html,
Flexible strain sensors or deformable strain sensors have attracted more and more attention for their excellent advantages
and wide applications in personal electronics and industrial monitoring. The electronic skins and robotics are candidates
for promoting the advancement of science and technology in recent years. Because of their biomedical applications,
flexible strain sensors will significantly expand the application scope of stretchable electronics, particularly large-area
electronics. The arbitrary surfaces covered with flexible electronics can be stretched in all directions, which are necessary
for the next generation electronics. Howerer, conventional electronic strain sensors based on metal and semiconductor
materials have poor portability, flexibility, and wearability, which is not applicable for stretchable sensors. With the rapid
development of materials and electronic technology in the past decades, flexible strain sensors have become more and
more popular in electronic skin, robotics, and other fields. Compared with conventional electronic sensors, flexible strain
sensors have many unique advantages, such as good biocompatibility, wearable, real-time monitoring and non-invasive.
In this review, the progress of wearable flexible strain sensors in materials, sensing mechanism, integrated output, and
potential application are presented. After a brief introduction for the development and application of wearable flexible
strain sensors, a simple comparison of old and new sensors is given. Then, studies on the different parts of the sensor and
the materials are reviewed, including substrate, the dielectric layer, active layer and electrodes. Subsequently, the
mechanism inclouding piezoresistivity, capacitivity, piezoelectricity, optical waveguide and other mechanisms of flexible
strain sensors are presented. In addition, this review summarizes the integration and output of the flexible strain sensors.
And the faced challenges of the flexible strain sensors and possible optimization solutions are proposed. Finally,
challenges, important directions and perspectives related to flexible stretchable strain sensors are discussed. Continued
rapid progress in this area is promising for the development of a fully integrated e-skin in the near future.
wearable, flexible electronics, strain sensors, electronic devices
doi: 10.1360/N972015-01445
649
柔性电子传感器详解 目前,许多智能化的检测设备已经大量地采用了各种各样的传感器,其应用早已渗透到诸如工业生产、海洋探测、环境保护、医学诊断、生物工程、宇宙开发、智能家居等方方面面。随着信息时代的应用需求越来越高,对被测量信息的范围、精度和稳定情况等各性能参数的期望值和理想化要求逐步提高。针对特殊环境与特殊信号下气体、压力、湿度的测量需求,对普通传感器提出了新的挑战。 面对越来越多的特殊信号和特殊环境,新型传感器技术已向以下趋势发展:开发新材料、新工艺和开发新型传感器;实现传感器的集成化和智能化;实现传感技术硬件系统与元器件的微小型化;与其它学科的交叉整合的传感器。同时,希望传感器还能够具有透明、柔韧、延展、可自由弯曲甚至折叠、便于携带、可穿戴等特点。随着柔性基质材料的发展,满足上述各类趋势特点的柔性传感器在此基础上应运而生。 柔性传感器的特点与分类 1、柔性传感器的特点 柔性材料是与刚性材料相对应的概念,一般,柔性材料具有柔软、低模量、易变形等属性。常见的柔性材料有:聚乙烯醇( P V A ) 、聚酯( P E T ) 、聚酰亚胺( P I ) 、聚萘二甲酯乙二醇酯( P E N ) 、纸片、纺织材料等
而柔性传感器则是指采用柔性材料制成的传感器,具有良好的柔韧性、延展性、甚至可自由弯曲甚至折叠,而且结构形式灵活多样,可根据测量条件的要求任意布置,能够非常方便地对复杂被测量进行检测。新型柔性传感器在电子皮肤、医疗保健电子、电工、运动器材、纺织品、航天航空、环境监测等领域受到广泛应用。 2、柔性传感器的分类 柔性传感器种类较多,分类方式也多样化。 按照用途分类,柔性传感器包括柔性压力传感器、柔性气体传感器、柔性湿度传感器、柔性温度传感器、柔性应变传感器、柔性磁阻抗传感器和柔性热流量传感器等;按照感知机理分类,柔性传感器包括柔性电阻式传感器、柔性电容式传感器、柔性压磁式传感器和柔性电感式传感器等。 柔性传感器的常用材料 1、柔性基底为了满足柔性电子器件的要求,轻薄、透明、柔性和拉伸性好、绝缘耐腐蚀等性质成为了柔性基底的关键指标。 在众多柔性基底的选择中,聚二甲基硅氧烷(PDMS成为了人们的首选。它的优势包括方便易得、化学性质稳定、透明和热稳定性好等。尤其在紫外光下粘附区和非粘附区分明的特性使其表面可以很容易的粘附电子材料。很多柔性电子设备通过降低基底的厚度来获得显著的
毕业论文设计
柔性可穿戴电子传感器常用材料 摘要随着智能终端的普及,可穿戴电子设备呈现出巨大的市场前景。传感器作为核心部件之一,将影响可穿戴设备的功能设计与未来发展。柔性可穿戴电子传感器具有轻薄便携、电学性能优异和集成度高等特点,使其成为最受关注的电学传感器之一。经过分析近年来柔性传感器的研究、设计和制造现状后,综述了柔性可穿戴电子传感器的常用材料,最后并提出了柔性可穿戴电子传感器面临的挑战与未来的发展方向。 关键词可穿戴电子;柔性传感器 The Common Materials of Flexible Wearable Electronic Sensors Abstract With the development of intelligent terminals, wearable electronic devices show a great market prospect. As one core component of the wearable electronic device, the sensor will exert a significant influence on the design and function of the wearable electronic device in the future. Compared with the traditional electrical sensors, flexible wearable sensors have the advantages of being light, thin, portable, highly integrated and electrically excellent. It has become one of the most popu-lar electronic sensors. This review focused on recent research advances of flexible wearable sensors, including signal trans-duction mechanisms, general materials, manufacture processes and recent applications. Piezoresistivity, capacitance and pie-zoelectricity are three traditional signal transduction mechanism. For accessing the dynamic pressure in real time and devel-oping stretchable energy harvesting devices, sensors based on the mechanoluminescent mechanism and triboelectric mecha-nism are promising. Common materials used in flexible wearable electronic sensors, such as flexible substrates, metals, inor-ganic semiconductors, organics and carbons, are also introduced. In addition to the continuously mapping function, wearable sensors also have the practical and potential applications, which focused on the temperature and pulse detection, the facial expression recognition and the motion monitoring. Finally, the challenges and future development of flexible wearable sen-sors are presented. Keywords wearable electronics; flexible sensor; printing manufacture; body monitoring 目录 1 引言 (4)
《电阻应变片的压力传感器设计》 题目电阻应变片的压力传感器设计时间 201608 班级 2014级 姓名 序号 指导教师 教研室主任 系教学主任 2016年08月 前言
随着科学技术的迅猛发展,非物理量的测试与控制技术,已越来越广泛地应用于航天、航空、交通运输、冶金、机械制造、石化、轻工、技术监督与测试等技术领域,而且也正逐步引入人们的日常生活中去。传感器技术是实现测试与自动控制的重要环节。在测试系统中,被作为一次仪表定位,其主要特征是能准确传递和检测出某一形态的信息,并将其转换成另一形态的信息。 传感器是指那些对被测对象的某一确定的信息具有感受(或响应)与检出功能,并使之按照一定规律转换成与之对应的可输出信号的元器件或装置。其中电阻应变式传感器是被广泛用于电子秤和各种新型机构的测力装置,其精度和范围度是根据需要来选定的。因此,应根据测量对象的要求,恰当地选择精度和范围度是至关重要的。但无论何种条件、场合使用的传感器,均要求其性能稳定,数据可靠,经久耐用。 随着技术的进步,由称重传感器制作的电子衡器已广泛地应用到各行各业,实现了对物料的快速、准确的称量,特别是随着微处理机的出现,工业生产过程自动化程度化的不断提高,称重传感器已成为过程控制中的一种必需的装置,从以前不能称重的大型罐、料斗等重量计测以及吊车秤、汽车秤等计测控制,到混合分配多种原料的配料系统、生产工艺中的自动检测和粉粒体进料量控制等,都应用了称重传感器,目前,称重传感器几乎运用到了所有的称重领域。 本次课程设计的是一个大量程称重传感器,测量范围为1t到100t。 本次课程设计的称重传感器就是利用应变片阻值的变化量来确定弹性元件的微小应变,从而利用力,受力面积及应变之间的关系来确定力的大小,进而求得产生作用力的物体的质量。应变片阻值的变化可以通过后续的处理电路求得。 传感器的设计主要包括弹性元件的设计和处理电路的设计。由于传感器输出的信号是微弱信号,故需要对其进行放大处理;由于传感器输出的信号里混有干扰信号,故需要对其进行检波滤波;由于传感器输出的信号通常都伴随着很大的共模电压(包括干扰电压),故需要设计共模抑制电路。除此之外,还要设计调零电路。 目录
传感器与检测技术 电阻应变式压力传感器的设计 电阻应变式压力传感器的设计 1. 、方案设计 原理框图如图一所示 数显表头低通滤波相敏检波U 过零比较器 2.2应变片检测原理 电阻应变片(金属丝、箔式或半导体应变片)粘贴在测量压力的弹性元件表面上,当被测压力变化时,弹性元件内部应力变形,这个变形应力使应变片的电阻产生变形,根据所测电阻变化的大小来测量未知压力,也实现本次设计未知质量的检测。 设一根电阻丝,电阻率为?,长度为I,截面积为S,在未受力时的电阻值为
丄----- ① S 如图一所示,电阻丝在拉力F作用下,长度I增加,截面S减少,电阻率T也相 应变化,将引起电阻变化△ R,其值为 . . :l S , —-p ————② RIS^ 对于半径r为的电阻丝,截面面积S—:r2,则有:ss—2:n r。令电阻丝的 轴向应变为;- J.I,径向应变为?汀r =—巩.丄|)一;,;由材料力学可知, 为电阻丝材料的泊松系数,经整理可得 空—(1+2忙三 R ? 通常把单位应电所引起的电阻相对变化称为电阻丝的灵敏系数,其表达式为 AP P / 从④可以明显看出,电阻丝灵敏系数K由两部分组成:受力后由材料的几何尺 受力引起(1 ^1);由材料电阻率变化引起的(,1耳;_1。对于金属丝材料, (;_1项的值比(1,2丄)小很多,可以忽略,故K = 1 。大量实验证明在电阻丝拉伸比例极限内,电阻的相对变化与应变成正比,即为常数通常金属丝的—1.7?3.6。④可写成 2.3弹性元件的选择及设计 本次设计对质量的检测是通过对压力的检测实现的,所以弹性元件承受物重也即压力,这就要求弹性元件具有较好的韧性、强度及抗疲劳性,通过查设计手册,决定选取合金结构钢
(1) 1 dR d R dA A 四种压力传感器的基本工作原理及特点 一:电阻应变式传感器 1 1电阻应变式传感器定义 被测的动态压力作用在弹性敏感元件上, 使它产生变形,在其变形的部位粘 贴有电阻应变片,电阻应变片感受动态压力的变化,按这种原理设计的传感器称 为电阻应变式压力传感器。 1.2电阻应变式传感器的工作原理 电阻应变式传感器所粘贴的金属电阻应变片主要有丝式应变片与箔式应变片 箔式应变片是以厚度为0.002―― 0.008mm 的金属箔片作为敏感栅材料,,箔 栅宽度为0.003――0.008mm 。丝式应变片是由一根具有高电阻系数的电阻丝 (直 径0. 015--0. 05mm ),平行地排成栅形(一般2――40条),电阻值60――200 ?, 通常为 120 ?,牢贴在薄纸片上,电阻纸两端焊有引出线,表面覆一层薄纸,即 制成了纸基的电阻丝式应变片。测量时,用特制的胶水将金属电阻应变片粘贴于 待测的弹性敏感元件表面上,弹性敏感元件随着动态压力而产生变形时, 电阻片 也跟随变形。如下图所示。B 为栅宽,L 为基长。 I 绘式应吏片 b )笹式应变片 材料的电阻变化率由下式决定:
式中; R—材料电阻2
3 —材料电阻率 由材料力学知识得; K —金属电阻应变片的敏感度系数 式中K 对于确定购金属材料在一定的范围内为一常数,将微分 dR 、dL 改写成增 量出、/L,可得 由式(2)可知,当弹性敏感元件受到动态压力作用后随之产生相应的变形 而形应变值可由丝式应变片或箔式应变片测出,从而得到了 ZR 的变化,也就得 到了动态压力的变化,基于这种应变效应的原理实现了动态压力的测量。 1.3电阻应变式传感器的分类及特点 「测低压用的膜片式压力传感器 常用的电阻应变式压力传感器包括彳测中压用的膜片一一应变筒式压力传感器 -测高压用 的应变筒式压力传感器 1.3.1膜片一一应变筒式压力传感器的特点 该传感器的特点是具有 较高的强度和抗冲击稳定性,具有优良的静态特性、 动态特性和较高的自震频率,可达30khz 以上,测量的上限压力可达到9.6mp a 。 适于测量高频脉动压力,又加上强制水冷却。也适于高温下的动态压力测量,如 火箭发动机的压力测量,内燃机、压气机等的压力测量。 1.3.2膜片式应变压力传咸器的特点 A 这种膜片式应变压力传感器不宜测量较大的压力,当变形大时,非线性 较大。但小压力测量中由于变形很小,非线性误差可小于 0.5%,同时又有较高 的灵敏度,因此在冲击波的测量中,国内外都用过这种膜片式压力传感器。 B 这种传感器与膜片一应变筒式压力传感器相比, 自振频率较低,因此在低dR "R [(1 2 ) C(1 2 )]
2017年 第62卷 第7期:635 ~ 649 引用格式: 蔡依晨, 黄维, 董晓臣. 可穿戴式柔性电子应变传感器. 科学通报, 2017, 62: 635–649 Cai Y C, Huang W, Dong X C. Wearable and flexible electronic strain sensor (in Chinese). Chin Sci Bull, 2017, 62: 635–649, doi: 10.1360/N972015-01445 ? 2016《中国科学》杂志社 https://www.doczj.com/doc/555686772.html, https://www.doczj.com/doc/555686772.html, 《中国科学》杂志社 SCIENCE CHINA PRESS 自然科学基金项目进展专栏 评 述 可穿戴式柔性电子应变传感器 蔡依晨1,2, 黄维1,2*, 董晓臣1,2* 1. 南京工业大学, 江苏省柔性电子重点实验室, 南京 211816; 2. 南京工业大学海外人才缓冲基地(先进材料研究院), 国家级“江苏先进生物与化学制造协同创新中心”柔性电子研究部, 南京 211816 * 联系人, E-mail: iamxcdong@https://www.doczj.com/doc/555686772.html,; iamwhuang@https://www.doczj.com/doc/555686772.html, 2016-09-29收稿, 2016-10-20修回, 2016-10-22接受, 2016-12-30网络版发表 国家杰出青年科学基金(61525402)和国家重点基础研究发展计划(2014CB660808)资助 摘要 传统的电子应变传感器大多基于金属和半导体材料, 其便携性、柔韧性和可穿戴特性差. 随着柔性电子材料和传感技术的快速发展, 柔性应变传感器在电子皮肤和机器人等领域的应用引起人们越来越广泛的关注. 由于生物相容性好, 同时兼具可穿戴性、实时监测、非侵入式等一系列优点, 高弹性和可拉伸性应变传感器的开发逐渐成为研究热点. 本文综述了近年来可穿戴式柔性电子应变传感在材料发展、传感机理、集成输出及潜在应用等方面的研究进展, 对可穿戴式柔性电子传感器所面临的挑战做了简单讨论, 提出了一系列可能的优化及解决方案, 并对其未来的发展方向进行了展望. 关键词 可穿戴式, 柔性电子, 应变传感, 电子器件 近年来, 柔性电子应变传感器件的发展非常迅速, 可以用来检测各种人体生理活动, 包括较大幅度的手、胳膊和腿的弯曲移动以及较小幅度的呼吸、吞咽、发声时肌肉震动、血压和眼压等[1,2]. 可穿戴电子传感器以信号传导的形式将生理活动信号转换为可视的电信号, 在人体临床诊断、健康评估、健康监控、虚拟电子、柔性触摸屏、柔性电子皮肤, 甚至工业机器人等领域[3~5]拥有很大的应用潜力. 传统的应变电子传感器件大多基于金属和半导体材料[6~8], 其拉伸性和敏感性受到很大限制, 不适用于检测人体活动. 与传统的电子应变传感检测器相比, 柔性电子应变传感器克服了易脆的缺点, 并且具较好的生物相容性、可拉伸性、透明性及可穿戴性和连续检测等优势[9,10]. 目前报道的柔性电子应变传感器常用的材料包括: 纳米粒子、纳米线、碳纳米管、石墨烯和有机材料等, 其中基于有机材料的柔性电子应变传感器的发展最为迅速, 在敏感性方面甚至 可以和人体的皮肤相媲美[11~13]. 因此, 通过将柔性电子器件集成并形成活性感知矩阵可以用于制备电子皮肤, 甚至包括人工智能机器人、仿生假体、人机互动系统等更多的人造智能系统. 在柔性电子传感众多应用中, 研究最为广泛的是电子皮肤. 然而人类的皮肤是一个非常敏感的器官, 它具有集成化、可伸缩的网络传感功能, 能够将外界的温度、湿度和触觉等刺激信号传递到大脑并接收大脑发送的指令做出反馈, 使我们能够避开危险或感受环境变化. 人们期待将柔性电子传感技术用于可穿戴式电子皮肤并期望其可以像人的皮肤一样感受外界的温度、压力、形变或纹理等复杂信号, 并且通过电子皮肤将外界刺激转化为可传输的电信号来输出甚至传达大脑的命令[14~16]. 为了模拟人类皮肤的功能, 常用的方法是通过柔性电子传感器的多功能化来提高自身性能, 例如: 结合化学和物理传感特性、提高生物降解性、增加自供电能力等, 通过不
可穿戴设备里鲜为人知的几种传感器 2015年可穿戴市场一片火热,有大量的可穿戴设备问世,从加速度计到光学心率监测器,其实许多消费者对这些产品并不了解。下面让我们来详细了解下这些可穿戴设备。 加速度计 做为最基本的传感器,加速度计可以用来测量运动的方向和速度。苹果iPhone是首款使用加速度计的量产机型,并且可以用来检测手机的方向和运动轨迹。虽然这件事发生在2007年,但是对于今 天却有深远的影响。 在可穿戴设备中,加速度计也是最常见的传感器,可以用来确定锻炼的步数和睡眠质量。通过测量你的移动速度,可穿戴设备可以告诉你走了多远;而当你相当长一段时间没有动作,它就知道你也许是 睡着了。 测高计 侦测体重变化也是可穿戴设备最重要的功能之一,而测高计就可以帮助你统计消耗了多少卡路里、爬了几层楼或变胖还是变瘦。测高计可以感受大气压的变化,因此通过这一点检测你爬了几层楼。而通
过对总步数的整合,可以让计算的热量消耗更准确。 气压计 这个相当方便的小装置可以告诉你今天是否会下雨还是艳阳高照,而这个传感器最常被用于运动类可穿戴设备,比如像 GarminFenix3或PolarV800这样的手环。手势控制传感器 这是此类技术的总称,可以检测身体各个部分的动作变化。通过一些简单的动作,包括手腕和手势可以控制其他设备。另外,还有产品可以让你动动手指就能控制电视音量,也非常神奇。 目前,这将技术仍然发展阶段,未来在该领域如何被运用也相当 让人期待。 陀螺仪 这个小装置可以提高你追踪运动的准确性,通常陀螺仪的数量越多越好,比如Jawbone或Fitbit这样的产品,就可以通过陀螺仪分辨 出你是在跑步还是骑车。GPS 这个功能仍然局限于一些高端运动手表中,不过像Moto360也
图片简介: 本技术介绍了一种可穿戴组合式表面肌电传感器,单个表面肌电传感器包括可穿戴的壳体,壳体内分别安装有可与体表接触的嵌入式电极和引线电极、电路板和电池,其中,嵌入式电极作为一检测通道,与电路板电连接;引线电极作为另一检测通道,通过插接连接器可选择性与电路板电连接;电路板采用电池供电,将嵌入式电极/和引线电极获得的肌电信号进行采集、处理后,传送给上位机;本技术可实现单、双通道的便捷模式切换,且安装结构简单紧凑,通用性好,成本相对较低。 技术要求 1.一种可穿戴组合式表面肌电传感器,其特征在于,单个表面肌电传感器包括可穿戴的壳体,所述壳体内分别安装有可与体表接触的嵌入式电极和引线电极、电路板和电池,其中, 所述嵌入式电极作为一检测通道,与所述电路板电连接; 所述引线电极作为另一检测通道,通过插接连接器可选择性与所述电路板电连接; 所述电路板采用电池供电,将所述嵌入式电极/和引线电极获得的肌电信号进行采集、处理后,传送 给上位机。
2.根据权利要求1所述的可穿戴组合式表面肌电传感器,其特征在于,所述电路板上设有分别电连接的前置放大器、滤波器、模数转换器、MCU模块和通信模块,所述通信模块采用有线通信和/或无线通信;其中,所述前置放大器分别与所述嵌入式电极和引线电极电连接,用于对所述电极采集到的肌电信号进行放大处理,所述模数转换器与所述MCU模块电连接,用于将放大、滤波处理后的信号进行模数转换得到数字化肌电信号,通过所述通信模块将所述数字化肌电信号发送给上位机。 3.根据权利要求2所述的可穿戴组合式表面肌电传感器,其特征在于,所述壳体内分别安装有电连接的第一电路板和第二电路板,其中, 所述第一电路板和第二电路板均采用电池供电; 所述第一电路板上设有所述前置放大器、滤波器和模数转换器,所述前置放大器分别与所述嵌入式电极和引线电极电连接; 所述第二电路板上设有所述MCU模块和通信模块。 4.根据权利要求3所述的可穿戴组合式表面肌电传感器,其特征在于,所述第一电路板和第二电路板之间设有所述电池。 5.根据权利要求3所述的可穿戴组合式表面肌电传感器,其特征在于,所述第一电路板和第二电路板之间采用柔性电路板和/或插针进行电连接。 6.根据权利要求1或2所述的可穿戴组合式表面肌电传感器,其特征在于,所述嵌入式电极采用焊针与所述电路板进行固定式电连接;所述电路板设有与所述插接连接器进行活动式电连接的插接口。 7.根据权利要求2所述的可穿戴组合式表面肌电传感器,其特征在于,所述电路板上设有加速度传感器模块和/或IMU惯性测量单元,用于检测可穿戴的壳体所附的人体部位对应的运动参数,将该运动参数发送给所述MCU模块,并通过所述通信模块发送给上位机。 8.根据权利要求2所述的可穿戴组合式表面肌电传感器,其特征在于,所述电路板设有用于电池自动充电的电池充电接口,当电池处于充电状态时,所述表面肌电传感器处于关机状态。 9.根据权利要求1所述的可穿戴组合式表面肌电传感器,其特征在于,所述壳体包括安装为一体的壳基体和壳盖,所述壳基体具有用于安装嵌入式电极和引线电极插接连接器、电路板和电池的安装空间,所述壳盖上设有与电路板电连接的按键面。 10.根据权利要求9所述的可穿戴组合式表面肌电传感器,其特征在于,设有所述嵌入式电极的所述壳基体表面采用粘胶面,用于与体表粘接接触。
第41卷第3期2018年6月 电子器件 Chinese Journal of Electron Devices Vol.41 No.3June 2018 项目来源:重庆市教委科学技术研究项目(KJ1603807)收稿日期:2017-09-05 修改日期:2017-10-18 The Preparation and Properties Testing of Wearable Flexible Tactile Sensing Unit LIU Yun ? (Institute of Intelligent Manufacturing and Automotive ,Chongqing Technology and Business Institute ,Chongqing 401520,China ) Abstract :Since there are some limitations to tactile sensors,a flexible tactile sensor based on passive wireless sensor is proposed.Firstly,the flexible substrate is modified by plasma technology combined with surfactant to increase adhesion between flexible substrate and metallic material.Secondly,a folded electrode structure with periodic struc-ture is prepared.Finally,a wireless passive oscillation sensor structure with no fold CNTs /PDMS composite force sensitive element and with inductance folds for induction output unit is designed and tested in the bending test finger.The test results show that when the fingers are in different degrees of curvature,the sensor signals will drift obviously,which shows that the passive wireless tactile sensor can be applied to finger bending induction.Key words :flexible electrode;polydimethylsiloxane;wrinkling;E-skin EEACC :7230 doi :10.3969/j.issn.1005-9490.2018.03.052 可穿戴式柔性触觉传感单元制备及测试 刘 韵? (重庆工商职业学院智能制造与汽车学院,重庆401520) 摘 要:针对触觉传感器存在一定的局限性,提出了一种基于无源无线的柔性触觉传感器,首先利用等离子体与表面活性剂 联合修饰工艺提高柔性衬底与金属材料之间的粘附性;其次制备了具有周期性结构的褶皱电极结构;最后以无褶皱的CNTs /PDMS 复合材料和有褶皱的电感为力敏敏感单元和输出单元,研制了无源无线振荡传感器结构并进行了手指弯曲测试三测试结果表明:手指在不同弯曲程度时,传感器的信号会发生明显的漂移,证明了其能够初步应用到手指弯曲感应方面三 关键词:柔性电极,聚二甲基硅氧烷,褶皱结构,电子皮肤 中图分类号:TN452 文献标识码:A 文章编号:1005-9490(2018)03-0813-06 引线与电极是电子产品最基本同时也是最重要的部分,引线与电极的性能优劣直接决定了电子产品能否正常工作[1]三传统的引线与电极无任何结构处理直接印刷至刚性电路板上,当刚性电路板因为不可抗的外力因素导致形变以后,导线或者电极就会断裂从而造成产品无法正常工作[2]三 柔性触觉传感单元对于引线与电极的要求更加 严格,柔性引线二电极必须保证一定弯曲次数内不会出现脱落现象,这对柔性引线二电极技术提出了更高的要求[3]三大多数柔性电子产品衬底为金属/电子 材料薄膜,有机材料润湿性差的问题将导致柔性衬底上制备的金属电极容易脱落,而且未经结构处理的柔性电极在拉伸过程中特别容易断裂且导致电阻 无穷大,最终使产品失效三因此如何解决金属材料与有机衬底材料的粘附性差的问题和如何保证柔性电极在发生形变时不会断裂失效为多年来难以解决的技术难题[4]三 针对以上问题,本文拟以聚二甲基硅氧烷(PDMS) 为柔性衬底材料,以金属Ag 为电极材料制备柔性电极三再以柔性电极为基底,以无源无线传感系统为工作原理,设计一个较为简单的仿生电子皮肤制备方案三以CNTs /PDMS 复合材料(CNT 为碳纳米管)作为电容感应手指的弯曲,从而引起了柔性电极作为电感的传感器的谐振频率的变化,频率信号的变化通过无线耦合方式测得,手指弯曲的变化通过测试频率信号进行标定三测试结果表明:手指进行不同程度弯曲时,传感 万方数据
第二部分研究报告 基于传感器技术在可穿戴设备中的应用研究 (机械工程学院机械三班张志忠 2014201289) 摘要:可穿戴设备是一种可以安装在人、动物和物品上,并能感知、传递和处理信息的计算设备,传感器是可穿戴设备的核心器件,可穿戴设备中的传感器是人类感官的延伸,增强了人类“第六感”功能。随着生物科技的发展,以及传感器小微型化与智能化方向的发展,可穿戴设备也许将会进化成植入人体的智能设备。 2.1传感器简介 传感器(英文名称:transducer/sensor)是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。 传感器的特点包括:微型化、数字化、智能化、多功能化、系统化、网络化。它是实现自动检测和自动控制的首要环节。传感器的存在和发展,让物体有了触觉、味觉和嗅觉等感官,让物体慢慢变得活了起来。通常根据其基本感知功能分为热敏元件、光敏元件、气敏元件、力敏元件、磁敏元件、湿敏元件、声敏元件、放射线敏感元件、色敏元件和味敏元件等十大类。 2.2可穿戴等智能终端设备应用 2013年是可穿戴设备元年,谷歌、三星、苹果、微软等科技界的佼佼者都有计划或已推出可穿戴设备。“互联网女皇”玛丽?米克尔也在《互联网报告2013版》中强调了可穿戴设备的增长潜力,认为这是下一个热门领域。目前上市的可穿戴设备五花八门,从智能眼镜到智能手表,从智能服装到智能鞋子,从高尔夫手套到拳击手套,但都和传感器技术有着千丝万缕的联系。回顾信息技术发展历程,人类经历了计算时代、通讯时代,当前正步入“感知时代”,以智能手机、可穿戴设备为代表的智能终端促使传感器需求呈现爆发式增长。 随着传感器集成性,功能性和智能化的提升,可穿戴设备已经不仅仅局限在人体的具体部位,而是在向全身布局,使其除了信息交互和通信,更具有了医疗意义,甚至具备了外部环境,建筑等数据的收集,监控和传输服务。 可穿戴设备的主要应用领域包括:以血糖、血压和心率监测为代表的医疗领域,以运动监测为代表的保健领域,以信息娱乐为代表的消费领域,以数据采集和显示为代表的工业和军事领域。IMS研究指出,保健和医疗领域的可穿戴设备占据今年60%市场份额,未来的份额可能会进一步提升。 2.3可穿戴设备中的传感器分类 可穿戴设备中的传感器根据功能可以分为以下几类:
第1章传感器基础理论思考题与习题答案 什么是传感器(传感器定义) 解:能够感受规定的被测量并按照一定规律转换成可用输出信号的器件或装置,通常由敏感元件、转换元件和调节转换电路组成。 传感器特性在检测系统中起到什么作用 解:传感器的特性是指传感器的输入量和输出量之间的对应关系,所以它在检测系统中的作用非常重要。通常把传感器的特性分为两种:静态特性和动态特性。静态特性是指输入不随时间而变化的特性,它表示传感器在被测量各个值处于稳定状态下输入输出的关系。动态特性是指输入随时间而变化的特性,它表示传感器对随时间变化的输入量的响应特性。 传感器由哪几部分组成说明各部分的作用。 解:传感器通常由敏感元件、转换元件和调节转换电路三部分组成。其中,敏感元件是指传感器中能直接感受或响应被测量的部分,转换元件是指传感器中能将敏感元件感受或响应的被测量转换成电信号的部分,调节转换电路是指将非适合电量进一步转换成适合电量的部分,如书中图所示。 传感器的性能参数反映了传感器的什么关系静态参数有哪些各种参数代表什么意义动态参数有那些应如何选择 解:在生产过程和科学实验中,要对各种各样的参数进行检测和控制,就要求传感器能感受被测非电量的变化并将其不失真地变换成相应的电量,这取决于传感器的基本特性,即输出—输入特性。衡量静态特性的重要指标是线性度、灵敏度,迟滞和重复性等。意义略(见书中)。动态参数有最大超调量、延迟时间、上升时间、响应时间等,应根据被测非电量的测量要求进行选择。 某位移传感器,在输入量变化5mm时,输出电压变化为300mV,求其灵敏度。 解:其灵敏度 3 3 30010 60 510 U k X - - ?? === ?? 某测量系统由传感器、放大器和记录仪组成,各环节的灵敏度为:S1=℃、S2=mV、S3=V,求系统的总的灵敏度。 某线性位移测量仪,当被测位移由变到时,位移测量仪的输出电压由减至,求该仪器的灵敏度。
前言 随着科学技术的迅猛发展,非物理量的测试与控制技术,已越来越广泛地应用于航天、航空、交通运输、冶金、机械制造、石化、轻工、技术监督与测试等技术领域,而且也正逐步引入人们的日常生活中去。传感器技术是实现测试与自动控制的重要环节。在测试系统中,被作为一次仪表定位,其主要特征是能准确传递和检测出某一形态的信息,并将其转换成另一形态的信息。 传感器是指那些对被测对象的某一确定的信息具有感受(或响应)与检出功能,并使之按照一定规律转换成与之对应的可输出信号的元器件或装置。其中电阻应变式传感器是被广泛用于电子秤和各种新型机构的测力装置,其精度和范围度是根据需要来选定的。因此,应根据测量对象的要求,恰当地选择精度和范围度是至关重要的。但无论何种条件、场合使用的传感器,均要求其性能稳定,数据可靠,经久耐用。 随着技术的进步,由称重传感器制作的电子衡器已广泛地应用到各行各业,实现了对物料的快速、准确的称量,特别是随着微处理机的出现,工业生产过程自动化程度化的不断提高,称重传感器已成为过程控制中的一种必需的装置,从以前不能称重的大型罐、料斗等重量计测以及吊车秤、汽车秤等计测控制,到混合分配多种原料的配料系统、生产工艺中的自动检测和粉粒体进料量控制等,都应用了称重传感器,目前,称重传感器几乎运用到了所有的称重领域。 本次课程设计的是一个大量程称重传感器,测量范围为1t到100t。 本次课程设计的称重传感器就是利用应变片阻值的变化量来确定弹性元件的微小应变,从而利用力,受力面积及应变之间的关系来确定力的大小,进而求得产生作用力的物体的质量。应变片阻值的变化可以通过后续的处理电路求得。 传感器的设计主要包括弹性元件的设计和处理电路的设计。由于传感器输出的信号是微弱信号,故需要对其进行放大处理;由于传感器输出的信号里混有干扰信号,故需要对其进行检波滤波;由于传感器输出的信号通常都伴随着很大的共模电压(包括干扰电压),故需要设计共模抑制电路。除此之外,还要设计调零电路。
柔性材料与可穿戴电子传感器前景资料报告通过这个学期的学习我对柔性材料和电子传感器有了一些了解。 一:柔性与柔性材料 1.1柔性材料的定义 柔性英文为Flexible,也可解释为挠性,是相对刚性而言的一种物体特性。挠性是指物体受力后变形,作用力失去之后物体自身不能恢复原来形状的一种物理性质。而刚性物体受力后,在宏观来看其形状可视为没有发生改变。弹性是指物体受力后变形,作用力失去之后物体自身能恢复原来形状的一种物理性质。其侧重物体的变形结果,而挠性侧重物体自身性质。因而柔性材料是指可伸缩,弯曲,扭转,变形而不失去性能的材料。通过这一性能我们可以得到许多延展性及曲度很高的电子材料。在查阅资料的过程中我还了解到了一种与本课题有关的但是处于初步阶段的电子技术——柔性电子技术。 1.2柔性材料的发展前景 柔性电子可概括为是将有机/无机材料电子器件制作在柔性/可延性塑料或薄金属基板上的新兴电子技术,以其独特的柔性/延展性以及高效、低成本制造工艺,在信息、能源、医疗、国防等领域具有广泛应用前景,如柔性电子显示器、有机发光二极管OLED、印刷RFID、薄膜太阳能电池板、电子用表面粘贴(Skin Patches)等。与传统IC技术一样,制造工艺和装备也是柔性电子技术发展的主要驱动力。柔性电子制造技术水平指标包括芯片特征尺寸和基板面积大小,其关键是如何在更大幅面的基板上以更低的成本制造出特征尺寸更小的柔性电子器件。柔性电子技术有可能带来一场电子技术革命,引起全世界的广泛关注并得到了迅速发展。美国《科学》杂志将有机电子技术进展列为2000年世界十大科技成果之一,与人类基因组草图、生物克隆技术等重大发现并列。美国科学家艾伦黑格、艾伦·马克迪尔米德和日本科学家白川英树由于他们在导电聚合物领域的开创性工作获得2000年诺贝尔化学奖。西方发达国家纷纷制定了针对柔性电子的重大研究计划,如美国FDCASU计划、日本TRADIM计划、欧盟第七框架计划中PolyApply和SHIFT计划等,仅欧盟第七框架计划就投入数十亿欧元的研发经费,重点支持柔性显示器、聚合物电子的材料/设计/制造/可靠性、柔性电子器件批量化制造等方面基础研究。 在最近的10年间,康奈尔大学、普林斯顿大学、哈佛大学、西北大学、剑桥大学等国际著名大学都先后建立了柔性电子技术专门研究机构,对柔性电子的
基于传感器技术在可穿戴设备中的应用研究 (机械工程学院机械三班张志忠 89) 摘要:可穿戴设备是一种可以安装在人、动物和物品上,并能感知、传递和处理信息的计算设备,传感器是可穿戴设备的核心器件,可穿戴设备中的传感器是人类感官的延伸,增强了人类“第六感”功能。随着生物科技的发展,以及传感器小微型化与智能化方向的发展,可穿戴设备也许将会进化成植入人体的智能设备。 传感器简介 传感器(英文名称:transducer/sensor)是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。 传感器的特点包括:微型化、数字化、智能化、多功能化、系统化、网络化。它是实现自动检测和自动控制的首要环节。传感器的存在和发展,让物体有了触觉、味觉和嗅觉等感官,让物体慢慢变得活了起来。通常根据其基本感知功能分为热敏元件、光敏元件、气敏元件、力敏元件、磁敏元件、湿敏元件、声敏元件、放射线敏感元件、色敏元件和味敏元件等十大类。 可穿戴等智能终端设备应用 2013年是可穿戴设备元年,谷歌、三星、苹果、微软等科技界的佼佼者都有计划或已推出可穿戴设备。“互联网女皇”玛丽?米克尔也在《互联网报告2013版》中强调了可穿戴设备的增长潜力,认为这是下一个热门领域。目前上市的可穿戴设备五花八门,从智能眼镜到智能手表,从智能服装到智能鞋子,从高尔夫手套到拳击手套,但都和传感器技术有着千丝万缕的联系。回顾信息技术发展历程,人类经历了计算时代、通讯时代,当前正步入“感知时代”,以智能手机、可穿戴设备为代表的智能终端促使传感器需求呈现爆发式增长。 随着传感器集成性,功能性和智能化的提升,可穿戴设备已经不仅仅局限在人体的具体部位,而是在向全身布局,使其除了信息交互和通信,更具有了医疗意义,甚至具备了外部环境,建筑等数据的收集,监控和传输服务。 可穿戴设备的主要应用领域包括:以血糖、血压和心率监测为代表的医疗领域,以运动监测为代表的保健领域,以信息娱乐为代表的消费领域,以数据采集和显示为代表的工业和军事领域。IMS研究指出,保健和医疗领域的可穿戴设备占据今年60%市场份额,未来的份额可能会进一步提升。 可穿戴设备中的传感器分类 可穿戴设备中的传感器根据功能可以分为以下几类:
湖南科技大学 传感器课程设计 题目 作者 学院机电工程学院 专业测控技术与仪器 学号 指导教师 二〇一七年六月十日
应变式传感器应用广泛,很多地方都得以应用,而本次课程设计的重点是设计一个应变片柱式传感器用来称重。研究的重点是传感器的基本原理,其中包括基本的理论分析、弹性元件的选材、弹性元件的尺寸设计、应变的选材、应变校验等。 课程设计的内容包括:掌握和了解相关传感器的基本测量方法和研究动态、制定传感器测量方案、进行必要的理论计算分析、用CAD对传感器结构及零件进行设计、对转换电路进行计算和设计等。 关键词:圆柱式、应变片、称重、形变
一、工作原理及特点——————————————————1 1、工作原理————————————————————————1 2、测量特点————————————————————————1 二、柱式传感器结构设计————————————————2 1、弹性元件材料的选定及要求————————————————2 2、弹性元件材料的处理———————————————————3 3、几种应变片的比较及选定—————————————————3 4、应变片材料的选定及要求—————————————————4 三、相关理论分析———————————————————6 1、弹性敏感元件的特性参数计算———————————————6 2、应变片参数的计算————————————————————7 3、弹性元件变形与应变片电阻值关系—————————————7 四、电路的设计————————————————————9 参考文献—————————————————————10
部分习题参考答案 第3章 电阻应变式传感器 3.1 何为电阻应变效应?怎样利用这种效应制成应变片? 答: 导体在受到拉力或压力的外界力作用时,会产生机械变形,引起导体电阻值的变化,这种导体材料因变形而使其电阻值发生变化的现象称为电阻应变效应。 利用导体材料制作成电阻,将这个电阻粘贴在弹性体上,当外力作用时,使弹性体变形从导致导体的长度l 、截面积S 发生变化,从而引起电阻值R 的变化,外部应力消失,弹性体恢复原状使电阻值也恢复原值,这样通过测量电阻值的变化,检测出外界作用力的大小。 3.2 什么是应变片的灵敏系数?它与金属电阻丝的灵敏系数有何不同?为什么? 金属丝灵敏系数0k 主要由材料的几何尺寸决定的。受力后材料的几何尺寸变化为(12)μ+,电阻率的变化为()//ρρε?。 而实际应变片的灵敏系数应包括基片、粘合剂以及敏感栅的横向效应。虽然长度相同,但应变状态不同,金属丝做成成品的应变片(粘贴到试件上)以后,灵敏系数降低了。 3.3 为什么增加应变片两端电阻条的横截面积便能减小横向效应? 敏感栅越窄,基长越长的应变片,横向效应越小,因为结构上两端电阻条的横截面积大的应变片横向效应较小。 3.4 金属应变片与半导体应变片在工作原理上有何不同?半导体应变片灵敏系数范围是多少,金属应变片灵敏系数范围是多少?为什么有这种差别,说明其优缺点。举例说明金属丝电阻应变片与半导体应变片的相同点和不同点。 金属导体应变片的电阻变化是利用机械形变产生的应变效应,对于半导体而言,应变传感器主要是利用半导体材料的压阻效应。 金属电阻丝的灵敏系数可近似写为1+2μ ,灵敏度系数k0=1.5~2; 半导体灵敏系数近似为k0= (Δρ/ρ)/ε =πE ≈50~100。