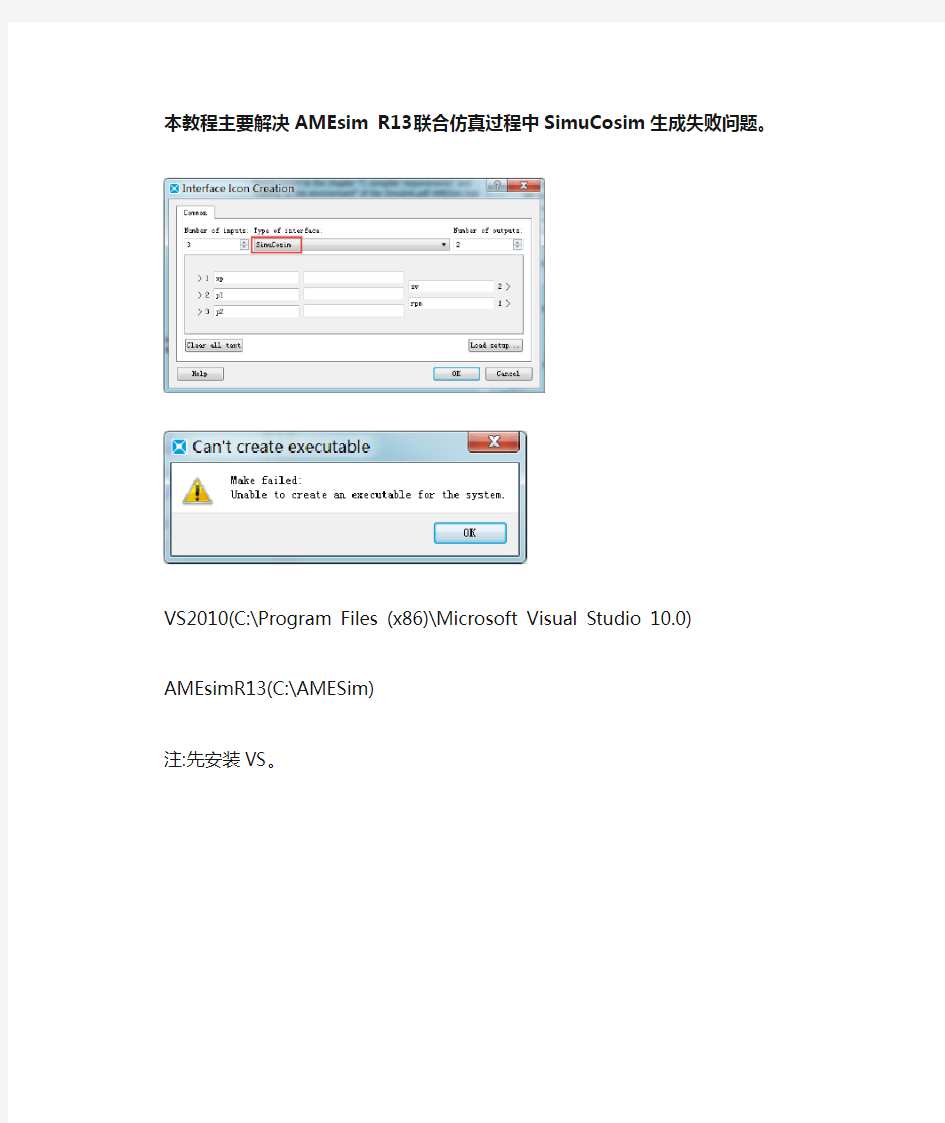

本教程主要解决AMEsim R13联合仿真过程中SimuCosim生成失败问题。
VS2010(C:\Program Files (x86)\Microsoft Visual Studio 10.0)
AMEsimR13(C:\AMESim)
注:先安装VS。
编辑还是新建记不清了,有就编辑,没有就新建。
用户变量(注,根据自己软件的安装路径对应修改)
PACH
C:\Program Files (x86)\Microsoft Visual Studio 10.0\Common7\Tools;C:\Program Files
(x86)\Microsoft Visual Studio 10.0\VC\bin;
MSSDK
C:\Program Files (x86)\Microsoft Visual Studio 10.0\SDK;C:\Program Files (x86)\Microsoft Visual Studio 10.0\DIA SDK;
系统变量
PACH
%AME%;%AME%\win32;%AME%\win64;%AME%\sys\mingw32\bin;%AME%\sys\mpich\mpd\bin ;%AME%\sys\cgns;%AME%\sys\python\win32;%SystemRoot%\system32;%SystemRoot%;%Syste mRoot%\System32\Wbem;%SYSTEMROOT%\System32\WindowsPowerShell\v1.0\;
AMEsim设置
参数模式
后切换到仿真模式,File->Write auxiliary files,时在文件当前目录下就会生成.dll文件,文件名与模型文件名相同。(还是没生成)。
本教程主要解决AMEsim R13联合仿真过程中SimuCosim生成失败问题。 VS2010(C:\Program Files (x86)\Microsoft Visual Studio 10.0) AMEsimR13(C:\AMESim) 注:先安装VS。
编辑还是新建记不清了,有就编辑,没有就新建。 用户变量(注,根据自己软件的安装路径对应修改) PACH C:\Program Files (x86)\Microsoft Visual Studio 10.0\Common7\Tools;C:\Program Files
(x86)\Microsoft Visual Studio 10.0\VC\bin; MSSDK C:\Program Files (x86)\Microsoft Visual Studio 10.0\SDK;C:\Program Files (x86)\Microsoft Visual Studio 10.0\DIA SDK; 系统变量 PACH %AME%;%AME%\win32;%AME%\win64;%AME%\sys\mingw32\bin;%AME%\sys\mpich\mpd\bin ;%AME%\sys\cgns;%AME%\sys\python\win32;%SystemRoot%\system32;%SystemRoot%;%Syste mRoot%\System32\Wbem;%SYSTEMROOT%\System32\WindowsPowerShell\v1.0\; AMEsim设置
参数模式
2014新版 综采工作面虚拟仿真 实操系统 技术参数
WM-ZC综采工作面虚拟仿真实操系统 1.产品简介 煤矿机械设备操作培训,当前主要依靠口头传授和老技工传带。理论培训脱离井下环境,内容较为抽象,培训效果较差。老技术工人的传帮带方式,存在安全隐患,尤其综采设备误操作甚至会带来严重的安全事故,另外该学习方法效率不高且影响正常的采掘作业。开发采煤系统实训操作台,通过计算机控制等技术,再现井下设备操作环境,配合采煤机操作台、支架工控制台、遥控操作台、液晶显示屏、计算机、单片机等硬件对相关设备工作原理、动作进行仿真,将井下设备搬到实验室,从根本上改变煤矿设备操作的培训模式。 2.产品特点 该设备为综采工作面安全技术虚拟实训系统,主要用于培训煤矿采煤工作面各技术工种,可实现采煤机司机、支架工、推溜工的协同实操模拟训练。 产品特点 (1) 培训手段新颖,直观性强,效果良好。采用3D仿真技术,模拟真实操作环境,实现人机交互操作,对采煤系统的操作技术要求、工作原理、故障处理等,都能在模拟的三维环境下,实现采煤机司机、支架工、溜子工,以及安检工等进行协同模拟操作。该系统采用先进的虚拟现实技术、3D动画、人机交互等先进技术,培训手段新颖,直观性强,能达到良好的培训效果。 (2) 培训成本较低,安全可靠,内容丰富。该采煤系统虚拟实训操作台为一次性投入,在长期的采煤系统培训中可以重复使用,培训内容可以无限丰富,也可以根据具体矿井情况进行修改,相比部分矿井建立“实训基地”的方式来说投入较低。另外,培训环境采用计算机仿真技术再现,具备很强的临场感,相对于“传帮带”方式则显得更加安全可靠。 (3) 能够实现多工种协同操作。本操作台通过主控计算机,能够实现采煤机司机、支架工、溜子工,以及安检工等进行协同模拟操作,这比各个工种单独通过理论、现场操作等培训方式更加直接,效果更加良好。 (4) 有利于缩短培训周期,更有利于提高培训合格率。该操作台可以根据矿上的具体情况,可以定制开发,也不存在安全隐患,培训方式更加先进,受训人员兴趣更高,效果良好,能够使培训的周期明显缩短,培训合格率也能得到提高。 (5) 培训内容更加丰富,有利于煤矿安全生产与事故隐患处理的统一协调。
1、我们先要确定所使用的电脑上已经安装版本匹配的软件,必要的软件是visual stdio也就是vc++,我使用的vs版本是2010;MatlaB,我使用的是2011b; amesim,我使用的是amesim 12.0版本。PS:这几个版本的匹配情况请参阅LMS那边提供的帮助文档。 2、在默认版本安装成功的情况下,我们来设置一下环境变量: (1)我们要是设置用户变量:1)变量名:MatlaB,值为:D:\Program Files\MATLAB\R2011b,如图所示 2)设置第二个用户变量,变量名:Path,值为:D:\Program Files\MATLAB\R2011b\bin\win64,如图所示 那么,我们默认以上两个用户变量已经设置完毕。 (2)我们设置系统变量,我们找到系统变量的Path变量,点击编辑
这里我建议把系统变量的Path复制出来检查一下几个变量是否已经添加 C:\Program Files\Microsoft HPC Pack 2008 R2\Bin\; %AME%; %AME%\win32; %AME%\win64; %AME%\sys\mingw32\bin; %AME%\sys\mpich\mpd\bin; %AME%\sys\cgns; %AME%\sys\python\win32; C:\Program Files (x86)\Intel\iCLS Client\; C:\Program Files\Intel\iCLS Client\; %SystemRoot%\system32; %SystemRoot%; %SystemRoot%\System32\Wbem; %SYSTEMROOT%\System32\WindowsPowerShell\v1.0\; C:\Program Files\Intel\Intel(R) Management Engine Components\DAL; C:\Program Files\Intel\Intel(R) Management Engine Components\IPT; C:\Program Files (x86)\Intel\Intel(R) Management Engine Components\DAL; C:\Program Files (x86)\Intel\Intel(R) Management Engine Components\IPT; d:\Program Files\MATLAB\R2011b\runtime\win64; d:\Program Files\MATLAB\R2011b\bin; D:\abaqus6134\Commands;D:\Program Files\MATLAB\R2011b\bin\win64; D:\Program Files (x86)\Microsoft Visual Studio 10.0这个可能需要动手自己添加
Amesim 与 matlab 联合仿真参数设置 实验软件平台 Matlab2009a , amesimR8a , VC6.0企业版 步骤: 1 将 VC++中的 "vcvar32.bat" 文件从 Microsoft Visual C++目录(通常 是 .\Microsoft Visual Studio\VC98\Bin中拷贝至 AMESim 目录下。 2 设置环境变量:我的电脑 -〉属性 -〉高级 -〉环境变量。设置 AMESim 环境变量:变量名 AME , 值为其安装路径如安装在 C 盘中则值为 C:\。设置 Matlab 环境变量:变量名MATLAB 值为 D:\MATLAB701。确认在系统变量 PATH 中包含系统安装目录C:\WINNT\System32 3 在 Matlab 的目录列表里加上 AMESim 与 Matlab 接口文件所在的目 录 %AME%\matlab\amesim。 File-〉 Set Path-〉 Add Folder 加上 C:\AMEsim\matlab\amesim。 (注意 amesimR8A 是 将 %AME%\scripting\matlab\amesim设置到 MATLAB 路径中 4 将联合仿真的许可证文件 licnese.dat 拷贝到 AMESim 安装目录下的 licnesing 文件夹中 5 确认是否在 AMESim 中选择 VC 作为编译器。具体操作在AMESim-〉 Opions-> AMESim Preferences->Compilation/Parameters中。 . 在MATLAB 命令窗口中输入命令 Mex -setup , 选择 VC 作为编译器。 如果上面设置成功下面不用看 下面给出 amesim4.0版本设置方法 为了实现二者的联合仿真,需要在 Windows2000或更高级操作系统下安装Visual C++ 6.0,AMESim4.2以上版本与 MATLAB6.1上版本 (含 Simulink
液压支架四连杆机构的三维建模和运动仿真 摘要:利用UG的建模模块(model)对液压支架四连杆机构进行快速整体建模,然后应用UG 的运动仿真模块(animation)对支架升架、降架的运动过程进行模拟分析,同时利用标记点 对顶梁端 点的运动轨迹进行跟踪,来验证端点最大水平变动量是否满足设计要求。 关键词:液压支架;四连杆机构;三维建模;运动仿真 0 引言 三维建模彻底改变了传统设计理念,使设计者头脑中产生的三维实体图形可以直接仿真到 屏幕上,既形象又直观。使设计人员从想象各种视图的困境中解放出来,对于复杂的模型更 可避免传统设计方式难以避免的错误。而在建造物理样机之前,通过建立的三维数字化模型进行运动仿真可以对运动特性及干涉情况进行检验,从而预知设计的机构是否满足要求。本文以ZTA6500型液压支架为例,应用UG软件探索一种三维整体简化、快速建模和运动仿真 的方法。 1 UG软件简介 Unigraphics(简称UG)是美UGS公司的拳头产品。该软件不仅具有强大的实体模型、曲面造型、虚拟装配和产生工程图等设计功能,而且在设计过程中可以进行有限元分析、机构运动分析、动力学分析和仿真模拟,从而提高设计的可靠性。同时可用建立的三维模型直接生成数控代码,用于产品的加工,其后处理程序支持多种类型数控机床。另外它所提供的二次开 发语言UG/open GRIP,UG/open API简单易学,实现功能多,便于用户开发专用CAD系统。 2 液压支架及其四连杆机构液压支架的主要功能是支撑工作面顶板,阻止顶板冒落的岩石 窜入作业空间,以保证工作面内机器和人员的安全生产。由于其工作性质所致,较为关心的 是端面距的尺寸,而梁端摆动幅度会对端面距的尺寸造成直接影响。液压支架四连杆机构的设 计是掩护式和支撑掩护式液压支架整体设计的核心和基础,四连杆机构是由顶梁,掩护梁,前、后连杆和底座五大构件组成。四连杆机构的主要作用是保证支架的纵向和横向稳定性,承受和传递外载,并能够实现移架,设计的好坏决定着顶梁端点的运动轨迹。 顶梁端点运动轨迹成双纽线形,其最大的水平偏摆量应小于或等于70 mm,最好为30 mm以下。 3 液压支架四连杆机构三维实体建模出于理论研究和快速建模的目的,本文将不采 用实际的液压支架模型,而是采用其简化的整体建模形式,其简化原则如下: 顶梁,前、后连杆,掩护梁和底座分别进行整体建模,而不是由许多小零部件组装成的装配体。实际的液压支架四连杆机构应该是由钢板焊接成的箱
Amesim与matlab 联合仿真参数设置 实验软件平台 Matlab2009a,amesimR8a ,VC6.0 企业版(英文版) 步骤: 1 将VC++中的"vcvar32.bat" 文件从Microsoft Visual C++目录(通常是.\Microsoft Visual Studio\VC98\Bin 中)拷贝至AMESim 目录下。 2 设置环境变量:我的电脑- 〉属性-〉高级- 〉环境变量。设置AMESim环境变量:变量名AME,值为其安装路径如安装在 C 盘中则值为C:\+amesim 安装路径。设置Matlab 环境变量:变量名MATLAB值为D:\MATLAB,此处我安装的matlab 在D 盘根目录下。确认在系统环境变量PATH 中包含系统安装目录C:\WINDOWS\system32 3 在Matlab 的目录列表里加上AMESim 与Matlab 接口文件所在的目录%AME%\matlab\amesim。File- 〉Set Path- 〉Add Folder 加上需要联合仿真的amesim文件目录和C:\AMEsim\matlab\amesim(注意R8A版本是将%AME%\scripting\matlab\amesim 设置到MATLAB路径中)加入matlab 默认路径中 4 将联合仿真的许可证文件licnese.dat 拷贝到AMESim 安装目录下的licnesing 文件夹中 5 确认是否在AMESim 中选择VC 作为编译器。具体操作
在AMESim-〉Opions-> AMESim Preferences->Compilation/Parameters中。. 在MATLAB命令窗口中输入命令Mex -setup,选择VC 作为编译器 注意点: 1,Vc建议安装企业版而且是英文的,其第一次打开安装文件安装并不完全,重启动以后再次点安装文件,会出现于第一次安装文件不同的界面,就说明没有安装完全 2,Matlab 的安装目录和amesim的安装目录都不能在中文路径下,而去文件夹的名称不能有空格 3,联合仿真设置成功的标志: 可以运行amesim- 〉HELP- 〉GET AMESIM DEMO-〉interface- 〉amesimsimulink 下的范例 4,如果运行的现实找不到matlab bin 则说明系统环境变量中没有设置matlab 路径,设置方法见上面,再重启电脑,再次用amesim打开范例并到参数模式下,运行TOOLS-〉Start matlab,系统会调用matlab 程序,再在打开的matlab 中找到与amesim中打开的文件同目录且同名的.mdl 文件,在matlab 中运行仿真,如果没有错误则在amesim 中进入仿真模式打开相应的元件就可 以看到曲线(注意在amesim中不用运行仿真)
AMESim和ADAMS 依托AMESim7.0与adams2007或2005联合仿真过程,除要用到这两中软件外还要安装完整版的vc++(注意不能要绿色版,要完整破解版)。 设置环境变量: 右键点击我的电脑>属性>高级>环境变量,在administration 用户变量栏下点“新建”,设置:变量名 AME_ADAMS_HOME 变量值填写你安装adams的安装路径(例如:D:\adams2005) 然后确定。在开始>运行栏中打cmd进入dos环境,输入 echo %AME_ADAMS_HOME% 注意echo后有空格,然后回车,显示你的adams安装路径(例如:D:\adams2005)说明正确。 下面总体说一下联合仿真过程,简单的说,是两种软件量与量的交换过程。首先在adams中会建立一个接受AMESim传来的量(f)驱动模型,然后从adams中输出一个模型量(w)传到AMESim。 建立adams模型: 首先建立一个工作文件夹,adams和AMESim的工作目录全部指向它,注意这个文件夹的名字和路径全部为英文不能有其他符号和字符,视频教程中建在c盘根目录下,命名aa。为了说明清楚,在这里仅建立了一个绕固定点旋转的杆件模型,在它和ground直接加入铰接关系,就是那个合页的连接关系,给它加入空间力矩。然后在build下选system elements>stable variable>new建立新的变量f(AMESim 输入扭矩),用同样的方法建立变量w(adam s输出角速度),并且设置w的值,从build下选system elem ents>stable variable>modify选择model中的w,设定f=值,点击三个小点的按钮进入function build,在下拉框中选择velocity,单击anglar velocity about Z,点击assist,在to marker 栏右键单击,选择marker>browse,选择part2 cm(杆中心点),OK,Ok,删掉原有的0,然后确定, 然后选择build>contral toolit>plant input在弹出对话框中,双击variable nam e栏,Database Navigator中选择f,OK;同样在build>contral toolit>plant output的Database Navigator中选择w为输出变量,OK! 将前面设定的扭矩值设定为f,就是在那个fuction窗口中选data element>plant input. 从tool>plung manage>中选择control,调出control,在control下选择plant explorer,在plant input选择pinput1,在plant output选择poutput1,点确定。这时在aa文件夹下会出现三个文件*.inf, *.adm, *.cmd,其中*.inf文件包含了进行联合仿真时AMESim软件所需要的一些基本信息,如工作路径、文件名、输入输出变量的特征、状态变量数。*.cmd, *.adm分别是仿真运行时计算方式为交互式和批处理式所必须的数据文件,包含ADAMS求解器可读的信息,这些信息在运行仿真时,将输入到求解器。
AMESim与ADAMS联合仿真 1.引言 AMESim(Advanced Modeling Environment for Simulation of engineering systems)软件是由法国IMAGINE公司于1995年推出的多学科复杂领域系统工程高级建模和仿真平台,该软件不要求用户具备完备的仿真专业知识,采用面向系统原理图建模的方法,便于工程技术人员掌握和使用。机构动力学分析软件ADAMS (automatic dynamic of mechanical system)集建模、求解和可视化技术于一体,能有效分析和比较多种参数方案。运用AMESim与ADAMS的联合仿真,可以有效的对设备的动态过程进行分析,根据交互分析产生的结果来评价设备的性能,为了更加真实的符合实际情况,理论分析用来完成检验产生的数值结果。这种虚拟产品开发方法与得出的结论将对设计人员提供一定帮助。 通过AMESim/ADAMS之间的接口,有两种方式实现联合仿真: 1)将模型从一个平台中输入到另一个平台中,采用单一的积分器进行计算。 2)各个平台分别利用自己的积分器计算自己的模型,通过预先统一的通讯间隔进行信息交换。 2.软件环境要求: 首先AMESim软件需要4.2级以上版本; ADAMS需要2003级以上版本(含A/Control模块)。其次必须要有Microsoft Visual C++ 编译器。如果需要从ADAMS环境中使用接口,那么还强烈推荐Fortran编译器,这样可以将AMESim的模型编译成为ADAMS的子函数(Subroutine)。该接口支持的操作系统包括Windows、Sun、SGI和IBM。
AMESim-Matlab 的联合仿真设置 1. 联合仿真的前期准备 1.1. AMESim 与Matlab 的版本匹配问题 AMESim 与Matlab 的联合仿真有两类接口: 接口(将AMESim 模型导入到Simulink 中) 接口(将Simulink 模型导入到AMESim 中) 两种不同的接口,对应的AMESim-Matlab 联合仿真的软件兼容列表,分别如图 1 和 2 所示。图中,"Probable"表示未经AMESim 官方测试,但仍然可以正常使用。"Yes"表示经AMESim 官方测试,确定可以正常使用。"No"表示该组合不能实现联合仿真。 如图 1 所示,"AMESim to Simulink" 接口对软件的版本要求较低,基本上AMESim Rev7(或者更高的版本)与Mablab R2007b (或者更高的版本)可以自由组合进行联合仿真。如果想使用"Simulink to AMESim" 接口,建议安装AMESim Rev11 以上的版本,Malab 只要求R2007b 以上即可。 图 1 "AMESim to Simulink" 接口 图 2 "Simulink to AMESim" 接口
1.2. Microsoft Visual C++编译器(VC++)的版本选择? AMESim 支持的VC++版本分别如图1(32 位编译器),图2(64 位编译器)所示。 图 1 和图 2 中,"Probable","Yes","No"表示的意思同上。经测试,AMESim Rev9 可以正常调用VS2010 版的VC++(32 位)。另外,从图 1 中,可以看到,VC++ 6.0 不能支持AMESim Rev11 以上的版本。建议安装英文版的VC++编译器,便于联合仿真出错时,查看编译信息,寻找问题所在。中文版的VC++编译器,在联合仿真出错时,部分编译信息会显示为乱码。 1.3. AMESim、Matlab、VC++的安装顺序需要注意吗? 建议的安装顺序为:先装VC++,Malab 和AMESim 的安装顺序任意,这样就能省去一些手动操作。AMESim 调用VC++编译器,需要事先将VC++编译器里的文件vcvars32.bat (32 位操作系统)或vcvars64.bat(64 位操作系统)拷贝到AMESim 的安装目录。如果先装VC++,后装AMESim,正常情况下,vcvars32.bat 文件会自动导入到AMESim 安装目录中。
综采工作面虚拟仿真实操培训系统 1.产品简介 煤矿机械设备操作培训,当前主要依靠口头传授和老技工传带。理论培训脱离井下环境,内容较为抽象,培训效果较差。老技术工人的传帮带方式,存在安全隐患,尤其综采设备误操作甚至会带来严重的安全事故,另外该学习方法效率不高且影响正常的采掘作业。开发采煤系统实训操作台,通过计算机控制等技术,再现井下设备操作环境,配合采煤机操作台、支架工控制台、遥控操作台、液晶显示屏、计算机、单片机等硬件对相关设备工作原理、动作进行仿真,将井下设备搬到实验室,从根本上改变煤矿设备操作的培训模式。 2.产品特点 该设备为综采工作面安全技术虚拟实训系统,主要用于培训煤矿采煤工作面各技术工种,可实现采煤机司机、支架工、推溜工的协同实操模拟训练。 产品特点 (1) 培训手段新颖,直观性强,效果良好。采用3D仿真技术,模拟真实操作环境,实现人机交互操作,对采煤系统的操作技术要求、工作原理、故障处理等,都能在模拟的三维环境下,实现采煤机司机、支架工、溜子工,以及安检工等进行协同模拟操作。该系统采用先进的虚拟现实技术、3D动画、人机交互等先进技术,培训手段新颖,直观性强,能达到良好的培训效果。 (2) 培训成本较低,安全可靠,内容丰富。该采煤系统虚拟实训操作台为一次性投入,在长期的采煤系统培训中可以重复使用,培训内容可以无限丰富,也可以根据具体矿井情况进行修改,相比部分矿井建立“实训基地”的方式来说投入较低。另外,培训环境采用计算机仿真技术再现,具备很强的临场感,相对于“传帮带”方式则显得更加安全可靠。 (3) 能够实现多工种协同操作。本操作台通过主控计算机,能够实现采煤机司机、支架工、溜子工,以及安检工等进行协同模拟操作,这比各个工种单独通过理论、现场操作等培训方式更加直接,效果更加良好。 (4) 有利于缩短培训周期,更有利于提高培训合格率。该操作台可以根据矿上的具体情况,可以定制开发,也不存在安全隐患,培训方式更加先进,受训人员兴趣更高,效果良好,能够使培训的周期明显缩短,培训合格率也能得到提高。 (5) 培训内容更加丰富,有利于煤矿安全生产与事故隐患处理的统一协调。
AMESim与ADAMS联合仿真操作说明 1.引言 AMESim(Advanced Modeling Environment for Simulation of engineering systems)软件是由法国IMAGINE公司于1995年推出的多学科复杂领域系统工程高级建模和仿真平台,该软件不要求用户具备完备的仿真专业知识,采用面向系统原理图建模的方法,便于工程技术人员掌握和使用。机构动力学分析软件ADAMS (automatic dynamic of mechanical system)集建模、求解和可视化技术于一体,能有效分析和比较多种参数方案。运用AMESim与ADAMS的联合仿真,可以有效的对设备的动态过程进行分析,根据交互分析产生的结果来评价设备的性能,为了更加真实的符合实际情况,理论分析用来完成检验产生的数值结果。这种虚拟产品开发方法与得出的结论将对设计人员提供一定帮助。 通过AMESim/ADAMS之间的接口,有两种方式实现联合仿真: (1)将模型从一个平台中输入到另一个平台中,采用单一的积分器进行计算。 (2)各个平台分别利用自己的积分器计算自己的模型,通过预先统一的通讯间隔进行信息交换。 2.软件环境要求 首先AMESim软件需要4.2级以上版本;ADAMS需要2003级以上版本(含A/Control模块)。其次必须要有Microsoft Visual C++ 编译器。 如果需要从ADAMS环境中使用接口,那么还强烈推荐Fortran编译器, 这样可以将AMESim 的模型编译成为ADAMS的子函数(Subroutine)。该接口支持的操作系统包括Windows、Sun、SGI和IBM。 3.AMESim与ADAMS接口操作 要成功使用接口, 必须在Windows中设置环境变量%AME_ADAMS_HOME%, 该环境变量的值为ADAMS的安装路径(例如C :\ADAMS2003。注意在ADAMS的安装路径中不能出现空格)。 如果需要从ADAMS环境中使用接口,那么还需要将dfvars.bat文件拷贝至AMESim的安装路径下。 3.1.在ADAMS中设置用于输入到AMESim的模型 在这种情况下,AMESim是主控软件,用户需要在AMESim中运行并控制ADAMS的仿真进程。从ADAMS输出到AMESim有两种方式: 1.共同仿真模式,AMESim通知ADAMS在给定的时间间隔提供它的输出。由ADAMS 自己来求解它的模型。 2.连续模式,AMESim从ADAMS输入完整的系统模型并将所有的方程集成起来在AMESim中求解,此时ADAMS只起到函数评估器的作用。 不管上述哪种模式,在ADAMS中的设置过程是一样的。 用户只需要在AMESim中选择是共同仿真方式或是连续模式输出方式。 3.1.1:创建/检查需要交换的变量。 在这个步骤中,用户需要检查一些状态变量的定义,使用这些状态变量作为两个软件间的交换变量。例如, 如果用在AMESim建立的液压作动器模型来驱动ADAMS中建立的机构模型, 那么这些变量就应该是力、位移以及速度等。事实上, AMESim需要根据位移和速度计算得到力。 ADAMS中的输出变量, 通常是速度和位移, 主要是使用ADAMS内部函数来定义;如AZ()用于角度测量,WZ()用于转速,DM()用于位移。
MATLAB/Simulink interface? Version 4.0 - March 2002 https://www.doczj.com/doc/0e9750114.html, EMail:cadserv21@https://www.doczj.com/doc/0e9750114.html, The document is for study only,if tort to your rights,please inform us,we will delete
Copyright ? IMAGINE S.A. 1995-2002 AMESim? is the registered trademark of IMAGINE S.A. AMESet? is the registered trademark of IMAGINE S.A. ADAMS? is a registered United States trademark of Mechanical Dynamics, Incorporated. ADAMS/Solver? and ADAMS/View? are trademarks of Mechanical Dynamics, Incorpo- rated. MATLAB and SIMULINK are registered trademarks of the Math Works, Inc. Netscape and Netscape Navigator are registered trademarks of Netscape Communications Corporation in the United States and other countries. Netscape’s logos and Netscape product and service names are also trademarks of Netscape Communications Corporation, which may be registered in other countries. PostScript is a trademark of Adobe Systems Inc. UNIX is a registered trademark in the United States and other countries exclusively licensed by X / Open Company Ltd. Windows, Windows NT, Windows 2000 and Windows XP are registered trademarks of the Microsoft Corporation. X windows is a trademark of the Massachusetts Institute of Technology. All other product names are trademarks or registered trademarks of their respective compa- nies. https://www.doczj.com/doc/0e9750114.html, EMail:cadserv21@https://www.doczj.com/doc/0e9750114.html, The document is for study only,if tort to your rights,please inform us,we will delete
计算机应用 基于S olidW orks 的液压支架三维建模和运动仿真 蔡文书,程志红,沈春丰 (中国矿业大学,江苏徐州221008) 摘要:基于S olidW orks 三维建模软件的功能和特点研究了ZF720放顶煤液压支架的三维建模与运动仿真的方法和应注意的问题。通过建模和运动仿真,达到优化液压支架设计的目的。 关键词:液压支架;三维建模;运动仿真中图分类号:T D35514;TP31 文献标志码:A 文章编号:100320794(2008)1120165203 3D Modeling and Dynamic Simulation of H ydraulic Support with S olidw orks CAI Wen -shu ,CHENG Zhi -hong ,SHEN Chun -feng (China University of M ining and T echnology ,Xuzhou 221008,China ) Abstract :The function and characteristic of 3D m odeling s oftwares S olidW orks are introduced.Based on S olid 2 W orks ,the way and issues of 3D m odeling and dynamic simulation of hydraulic support are studied.Through 3D m odeling and dynamic simulation ,the design of hydraulic support is optimized.K ey w ords :hydraulic support ;three -dimension m odeling ;dynamic simulation 0 前言 液压支架是煤矿生产的主要设备,其主要部件况通过控制系统的控制信号传递给远程控制大厅。 图3 P LC 控制流程图 通过利用P LC 控制,方便地使配套设备联动起来,在满足了工程顺序工作要求的同时又增加了系统的可靠性和操作简便性。4 结语 本文中的高位翻卸装车机通过液压缸与绳轮组合机构相互配合的传动方式,有效地降低了冲击,延长了使用寿命,而且避免了高位翻车机的翻举高度不够产生的下坡和上坡问题。此高位翻车机在龙口 矿业集团北皂煤矿排矸系统现场使用已有2a 多的 时间,完全达到了设计要求的性能指标。利用上面的P LC 控制系统,该高位翻车机翻卸矸石车的平均时间是23s ,可以承受的最大翻装载荷(包含翻装架重量)达到10t 。采用P LC 控制系统后,每班只需要1名工人就可以完成翻卸工作,比以前减少了2名工人。而且采用P LC 控制系统后,操作人员可以在室内操控作业,改善了工作环境。 生产实践证明该高位翻车机不需要建筑地下受料仓,生产环节简单,基建投资小;采用液压传动,无级调速,动作平稳;利用P LC 控制系统,操作简便可靠。该高位翻车机在使用中表现出良好的经济效益和安全效益,在矿山的运矸运煤系统中有广泛的应用前景,可广泛应用于煤炭、冶金、化工及建材等行业。 参考文献: [1]李进兰,崔希海,宋新元,等.新型液压绳轮高位翻卸装车机的研发[J ].煤矿机械,2007,28(10):142-144. [2]张利平.现代液压技术应用220例[M].北京:化学工业出版社,2004. [3]郑凤翼,郑丹丹.图解P LC 控制系统梯形图和语句表[M].北京:人民邮电出版社,2006. [4]练存才,刘兰山.高位翻车机内阻车器失效原因与改进措施[J ].建井技术,1999(6):40-42. [5]雷天觉,李寿刚,李妙成,等.液压工程手册[K].北京:机械工业出版社,1998. 作者简介:崔希海(1957-),山东泰安人,博士,硕士研究生导师,主要研究方向:机械设计,液压传动等,电子信箱:s ongtb @https://www.doczj.com/doc/0e9750114.html,. 收稿日期:2008205227 第29卷第11期2008年 11月 煤 矿 机 械C oal Mine Machinery V ol 129N o 111N ov.2008
ADAMS与AMESim联合仿真 以AMESim作为主软件进行联合仿真。在ADAMS中建立曲柄滑块机构,将建立的模型导入AMESim中,用AMESim中的液压系统驱动曲柄转动,并绘制滑块的位移曲线。在创建模型前通过Settings—Interface Style—Classic将界面切换到经典模式。 1、在Adams中建立曲柄滑块机构,如图示: 2、通过Build—System Elements—New创建变量建立状态变量t,x,其中t代表力,x代表滑块的位移; t作为输入变量,默认为0;x作为输出变量,使用函数DZ(MARKER_12, MARKER_13, MARKER_13),MARKER_12是滑块上的一坐标系,MARKER_13
为ground与滑块建立移动副时产生的ground上的坐标系,其含义是测量MARKER_13到MARKER_12的距离,方向沿MARKER_13的Z轴方向。 3、通过Date Elements—Plant—Plant Input/Plant Output建立输入输出变量,并与状态变量连接起来 4、右击SFORCE_1将力与输入变量连接起来
5、通过Controls—Plant Export将ADAMS模型导出
6、在AMESim中建立液压系统如图示: 通过Modeling—Interface block—Import Adams model,选择工作目录中刚刚生成的inf文件; 完成如下图示的菜单
最终的液压系统如下图示
7、进行联合仿真,注意Print interval的值要小于MSC.Adams output step size 的值 进行联合仿真时如下图示:
高版本AMESim—MATLAB联合仿真设置详细步骤说明:现以AMESimR12、MATLAB2010a为例说明,其他版本类似。 1、版本要求 亮色为可行匹配 2、辅助软件VS 若要使用AMESim 与Simulink 的接口,则需要在本机安装编译器,高版本软件需要高版本的编译器,这里以VS2008为例设置。一般推荐先安装VS编译器,然后安装Matlab,最后安装AMESim的顺序。 若后安装VS编译器,将VS编译器安装目录下如D:\Program Files\Microsoft Visual Studio 9.0\VC\bin目录中的nmake.exe 文件和vcvars32.bat 文件拷贝至AMESim 安装目录,如D:\AMESim\v1200下。
3、环境变量设置 定义Windows 系统环境变量: 1)选择“控制面板-系统”或者在“我的电脑”图标上点右键,选择“属性”; 2)在弹出的“系统属性”窗口中选择“高级”页,选择“环境变量”; 3)用户变量中添加 HOME D:\ MATLAB D:\MATLAB\R2010a Path D:\Program Files\Microsoft Visual Studio 9.0\Common7\Tools;D:\Program Files\Microsoft Visual Studio 9.0\VC\bin;D:\Program Files\Microsoft Visual Studio 9.0\VC\bin;D:\MATLAB\R2010a\bin;D:\MATLAB\R2010a\bin\win32 4) 在系统变量中添加 在Path 环境变量中加入(以分号与其它已经存在的变量值隔开)路径:Matlab_Root( 如D:\Matlab\R2010a)\bin 和Matlab_Root( 如D:\Matlab\R2010a)\bin\win32 ,以及%windir%\System32,其中%windir%指的是Windows 的安装路径,如C:\WINNT Path D:\Program Files\Microsoft Visual Studio 9.0;D:\AMESim\v1200;D:\AMESim\v1200\win32;D:\AMESim\v1200\sys\mingw32\bin;D:\AMESi m\v1200\sys\mpich\mpd\bin;D:\AMESim\v1200\sys\cgns;%SystemRoot%\system32;%SystemRo ot%;%SystemRoot%\System32\Wbem;D:\MATLAB\R2010a\bin\win32;C:\WINDOWS\system32;C: \WINNT
AMESim—MATLAB(64位)联合仿真设置详细步骤说明:现以AMESimR12、MATLAB2014b为例说明,其他版本类似。 1、版本要求 2、辅助软件VS2013 若要使用 AMESim 与 Simulink 的接口,则需要在本机安装编译器,高版本软件需要高版本的编译器,这里以VS2013为例设置。一般推荐先安装VS编译器,然后安装 Matlab,最后安装 AMESim的顺序。 若后安装VS编译器,将VS编译器安装目录下如 D:\ Microsoft Visual Studio 12.0 \VC\bin 目录中的nmake.exe 文件和vcvars32.bat 以及D:\Microsoft Visual Studio 12.0\VC\bin\amd64下的vcvars64.bat(64位版本的MATLAB)文件拷贝至 AMESim 安装目录,如D:\AMESim\v1200下。 3、环境变量设置 定义Windows 系统环境变量: 1)选择“控制面板-系统”或者在“我的电脑”图标上点右键,选择“属性”; 2)在弹出的“系统属性”窗口中选择“高级”页,选择“环境变量”; 3)用户变量中添加 HOME D:\ MATLAB D:\MATLAB\R2014b Path D:\ Microsoft Visual Studio 12.0\Common7\Tools; D:\ Microsoft Visual Studio 12.0\VC\bin; D:\Program Files\MATLAB\R2014b\bin; D:\Program Files\MATLAB\R2014b\bin\win64
第一章引言 本章将介绍AMESim 家族产品和AMESim 4.2的新特征。 AMESim是什么? AMESim 怎么用? 如何使用文件组? 在线帮助的组织结构。AMESim 4 软件包。 AMESim 4.2的新特征 1.1 AMESim是什么? AMESim表示工程系统仿真高级建模环境(A dvanced M odeling E nvironment for performing Sim ulations of engineering systems).基于直接图形接口,在整个仿真过程中系统可以显示在环境中。AMESim 使用图标符号代表各种系统的元件,这些图标符号要么是国际标准组织如工程领域的ISO为液压元部件确定的标准符号,或为控制系统确定的方块图符号,或者当不存在这样的标准符号时可以为该系统给出一个容易接受的非标准图形特征。. Figure 1.1: AMESim中使用符号 Figure 1.1 所示为使用标准液压,机械和控制符号表达的一个工程系统。Figure 1.2所示为使用了非标准图形特征的汽车制动系统。 Figure 1.2: 汽车制动系统的符号
1.2 如何使用AMESim? 使用AMESim你可以通过在绘图区添加符号或图标搭建工程系统草图,搭建完草图后,可按如步骤进行系统仿真: ?图标元件的数学描述 ? 设定元件的特征 ? 初始化仿真运行 ? 绘图显示系统运行状况 Figure 1.3 所示为从HCD符号构建的一个三柱塞径向液压泵详细模型。箭头用来表示液流方向。 Figure 1.3: 从HCD符号构建的一个三柱塞径向液压泵
大多数自动化系统都可按上述步骤执行,在每一步都可以看到系统草图。 接口 现在的联系是为了提供软件间的接口使它们能够联合工作,以便你能够获得每个软件的最佳特征。标准AMESim软件包提供了与MATLAB.的接口。这使你有权使用控制器设计,优化工具和功率谱分析等。还有其它一些接口可用,AMESim 最新接口信息请参见1.6.6节接口。 方程 AMESim用方程组来描述工程系统的动态行为,用计算机码作为系统模型来执行。在系统内用方程和计算机码构建各元件的模型。这些用作子模型。AMESim 内有庞大的元部件子模型和图标符号库。 标准库 标准库提供了控制和机械图标,子模型允许你完成大量工程系统的动态仿真。另外,还有一些可选库,如液压元件设计库,液压阻尼,气动,热力学,热力液压,冷却系统,传动系,输油等... 1.3如何使用文件组 文件组由以下组成:The documentation set is made up of: ? 打印和PDF格式的AMESim平台使用手册 ?打印和PDF格式的各种库使用手册 ? HTML 格式的所有子模型的说明书 打印格式文件包含在随同你申请的CD ROM中。