2007年(第29卷)第10期
汽 车 工 程A uto m otive Eng i neer i ng
2007(V o.l 29)N o .10
2007197
正向仿真模型与反向软件ADV IS OR 的集成开发
原稿收到日期为2006年7月25日,修改稿收到日期为2006年11月24日。
曾小华1
,王庆年2
,李 胜3
,王伟华
2
(11吉林大学,汽车动态模拟国家重点实验室,长春 130025; 21吉林大学汽车工程学院,长春 130025;
31一汽解放青岛汽车厂,青岛 266043)
[摘要] 混合动力汽车仿真软件A DV IS OR 是一种反向仿真软件,介绍在ADV ISOR 2002平台下如何通过修改进行正向仿真软件的开发,并嵌入到其GU I 平台下进行仿真。仿真结果表明,在ADV ISOR 平台下可以进行正向模型的仿真,这对实际混合动力控制策略的开发具有重要意义。
关键词:ADV I SOR;混合动力汽车;控制策略;正向仿真
D evel op m ent of For w ard S i m ulati on M ode l i n ADV IS OR2002
Zeng X iaohua 1
,W ang Q ingnian 2
,L i Sheng 3
&W ang W eihua
2
11J ili n Un i v e rsit y,S t a t e K e y La boratory of Au to m obile Dyna m ic a lS i mu l a tion,Changchun 130025;
21Colle g e of Auto m obile Eng i neering,Jilin Universit y ,Chang c hun 130025; 31Q i ngdao Au to Fa ctory o f FAW J i efang,Qingd ao 266043
[Abstract] A sche m e for u tilizing t h e reverse soft w are ADV ISOR to conduct for w ar d si m ulati o n is presented i n this paper .Spec ificall y ,t h e for w ard si m u lation m odules i n ADV ISOR2002are m odified and then e m bedded into
its graphic user i n terface (GU I)p latfo r m so that the for w ard si m u lati o n can be perfor m ed.The resu lts show that the sche m e is feasi b le ,hav ing great sign ificance for the developm en t of rea l contro l stra tegy for hybrid electric veh icle .
K eyw ords :ADV ISOR ;Hybrid electric vehicle ;Contro l strategy ;For w ard si m ulation
前言
混合动力汽车在节能和降低排放方面的优越性在国内外引起了一个新的研究热潮
[1-2]
。其中仿真
软件的开发尤为重要,国外已经开发出很多仿真软件,其中ADV I SOR 是一种比较优秀的车辆研究分析工具。它可用于车辆传动方案的性能分析
[3]
。
ADV I SOR 软件也有其自身的缺点,如它只适合于单轴驱动车辆的仿真。由于ADV ISOR 软件代码开放的特点,文献[4]已对其进行二次开发,以嵌入双轴驱动模块库用来补充对四轮驱动汽车的仿真。另外ADV ISOR 是一反向仿真软件,和实际课题的控制思想有很大的差别,因此文献[5]开发了一正向仿真模块,并同时开发了用来嵌入该仿真模块的GU I 平台C H E V 2002,从而对整车进行性能仿真。C H E V2002和ADV I SOR 相比,其代码不够开放,不
易增加多种模块,并且它只是用加速踏板和制动踏
板作为输入,不能对各种工况进行仿真。因此,文中利用ADV I SOR 本身的代码开放性及其操作方便的特点,对原正向仿真模块进行修改,并嵌入到ADV I -SOR 平台中,让其参与各种工况的仿真,同时能够对控制策略进行考察研究,而这种控制策略与实际调试整车及试验台架的控制策略相同,所以具有重要的实际意义。
1 正向和反向仿真软件的特点
目前混合动力汽车仿真有两种基本方法,即后向仿真(backw ard -fac i n g veh icle si m u lation)和前向仿真(for w ard -faci n g veh icle si m u l a ti o n),分别如图1和图2所示。国内也称后向仿真为/逆向0或/反向0仿真,称前向仿真为/正向0仿真
[6]
。
国内应用最为普遍的混合动力汽车性能反向仿
#852 #汽 车 工 程2007年(第29卷)第10
期
图1
后向式车辆仿真流程图
图2 前向式车辆仿真流程图
真软件之一是ADV ISOR,而正向仿真软件使用较普遍的是AVL 的CRU ISE 软件,另外美国阿贡国家实验室(ar gonne national laboratory)的PSAT 也是一种正向式仿真模型,但国内应用较少。文中主要就ADV I SOR 和CRU I SE 软件讨论其各自特点。111 反向仿真软件ADV ISOR 的特点
仿真模型从满足循环工况要求出发,计算动力系统各部件必须提供的转矩、转速及功率等,仿真信息沿整车阻力模型、车轮模型、传动系统模型最终到达动力总成模型。仿真的顶层模型如图3
所示。
图3 ADV ISOR 仿真模型
该反向建模与仿真不考虑驾驶员的意图以及动力系统(尤其是离合器和变速器)的动态过程,计算步长较大(一般为1s),计算速度快,可以通过反复计算以达到系统的最高性能。其主要功能适用于不同设计方案之间的比较和评价分析,可用于整车性能仿真分析与预测,但并不适合控制算法的设计和开发。
112 正向仿真软件CRU ISE 的特点
AVL 的C RU I SE 是正向仿真软件,用于研究车辆动力性、燃油经济性、排放性能与制动性能,还可用于车辆开发过程中的传动系匹配和车辆性能预测等,能够对混合动力汽车和电动汽车进行建模仿真和性能模拟。软件界面友好,分析结果直观、易懂,提供了与M atlab 、C 、Fortran 等通用编程软件的接口,为
用户建立自定义模块及控制元件的模型提供了方便。
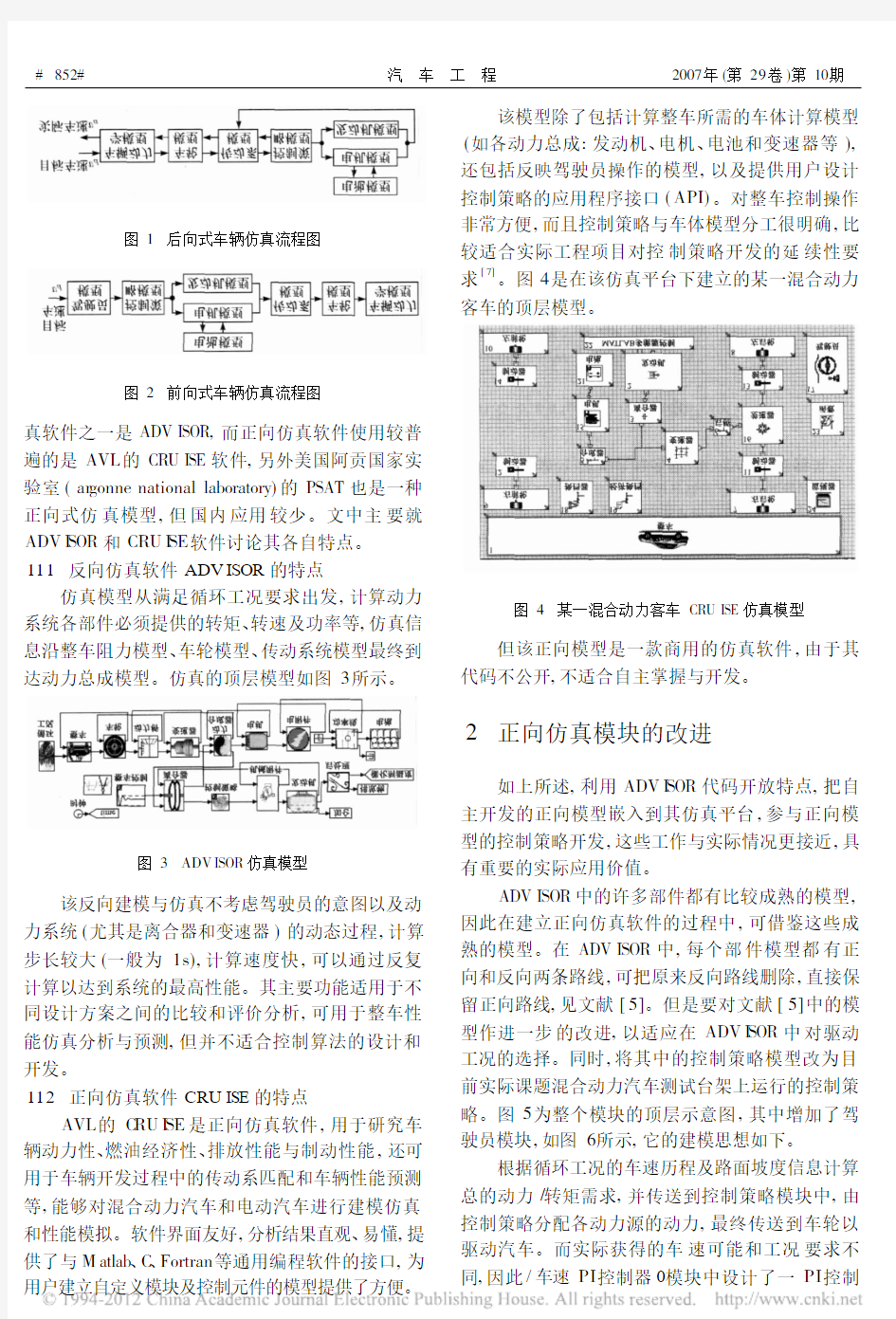
该模型除了包括计算整车所需的车体计算模型(如各动力总成:发动机、电机、电池和变速器等),还包括反映驾驶员操作的模型,以及提供用户设计控制策略的应用程序接口(API)。对整车控制操作非常方便,而且控制策略与车体模型分工很明确,比较适合实际工程项目对控制策略开发的延续性要求
[7]
。图4是在该仿真平台下建立的某一混合动力
客车的顶层模型。
图4 某一混合动力客车CRU ISE 仿真模型
但该正向模型是一款商用的仿真软件,由于其代码不公开,不适合自主掌握与开发。
2 正向仿真模块的改进
如上所述,利用ADV I SOR 代码开放特点,把自主开发的正向模型嵌入到其仿真平台,参与正向模
型的控制策略开发,这些工作与实际情况更接近,具
有重要的实际应用价值。
ADV ISOR 中的许多部件都有比较成熟的模型,因此在建立正向仿真软件的过程中,可借鉴这些成熟的模型。在ADV ISOR 中,每个部件模型都有正向和反向两条路线,可把原来反向路线删除,直接保留正向路线,见文献[5]。但是要对文献[5]中的模型作进一步的改进,以适应在ADV I SOR 中对驱动工况的选择。同时,将其中的控制策略模型改为目前实际课题混合动力汽车测试台架上运行的控制策略。图5为整个模块的顶层示意图,其中增加了驾驶员模块,如图6所示,它的建模思想如下。
根据循环工况的车速历程及路面坡度信息计算总的动力/转矩需求,并传送到控制策略模块中,由控制策略分配各动力源的动力,最终传送到车轮以驱动汽车。而实际获得的车速可能和工况要求不同,因此/车速PI 控制器0模块中设计了一PI 控制
2007(V o.l 29)N o .10曾小华,等:正向仿真模型与反向软件A DV IS OR 的集成开发#853 #
图5
正向仿真模型
图6 驾驶员模型
器,如图7所示,主要根据车速差来调节总的动力要求,其中的PI 控制参数可根据不同的车型及工况进
行适当的调节。
图7 汽车车速P I 控制器
控制策略模块的建模思想是通过不同的动力要求、电池SOC 状态以及车辆车速等状态信息,控制发动机在其最佳区域内工作。如果当发动机处于怠速时,控制策略会关闭发动机;如果加速时动力要求很大,控制发动机在中等负荷即最佳区域内工作,而控制电机参与助力;如果是滑行或制动,控制电机发电用来吸收制动能量。这些控制思想已经在台架试验中得到了实现,并且各种驱动工况也已成功地进行了调试,发动机大部分时间都工作在最佳区域内。
其他模块和文献[5]一样,是从ADV ISOR 模块中借鉴而来。至此,把如图5所示的顶层模块取名为BD_FOR _P AR _FAW.m d,l 保存在ADV I SOR2002m ode l 目录下。
3 正向模型嵌入ADV IS OR 2002
上述正向仿真模型能在ADV I SOR2002平台进
行仿真,可以参考文献[8],下面进行简要说明。
将原有的装载文件PARALLEL _defau lts_in .m 的头两条语句修改为:
v i n .f na m e =-FOR _PAR _defaults_in .;v i n .f dri v etra i n .na m e=-FOR_P AR .;
并保存为FOR_PAR_defau lts_in .m 的装载文件。另外,其他的部件同样可以根据用户要求进行修改。为了使ADV I SOR2002能识别此模块,须向全局变量V inf 的驱动链域中添加如下命令:
Option li s t(-add .,-drivetra i n .,-FOR_P AR .)然后,在b lock _diagra m _na m e .m 文件的sw itch drivetra i n 语句中增加下面语句:
C ase -FOR_P AR .
bd_na m e=-BD_FOR_PAR _FAW .;
这样,在ADV I SOR2002的GU I 界面中便可看到新驱动链顶层配置项模型(BD _FOR _PAR _F AW )。另外,可在ADV ISOR \gu i\gui_i m age .m 文件中增加所索引的图像文件名,即可替换成用户所
显示的图像界面[8-9]
。
通过上述配置即可完成正向仿真模型嵌入到ADV ISOR2002的GU I 。用户通过这个界面可方便地配置汽车参数,并且可以选择不同的工况来进行正向仿真,以考察实际控制策略的合理性。
4 仿真及结果
为了验证所修改的正向仿真模块是否能在AD-V I SOR 2002平台上进行仿真,选用表1所示的参数
表1 整车及主要部件参数
整车参数整车质量/kg 15000迎风面积/m 27124车轮半径/m 0150滚阻系数01009空阻系数0179传动系平均效率0185动力传动系参数变速器速比
1挡131452挡71573挡51014挡3177
5挡
2184
主减速器速比
1
发动机参数
最大功率/kW (转速/r #m i n -1)171(2300)最大转矩/N #m (转速/r #m i n -1)823(1600)
电动机
参数额定功率/k W 30
额定转速/r #m i n -1
1300最高转速/r #m i n -1
5000平均工作效率0192铅酸电
池参数
标准放电容量/A #h
85
电池块
25
#854 #汽 车 工 程2007年(第29卷)第10期
进行考察,并且选择国内北京循环工况进行仿真。
图8为正向模型在ADV I SOR2002平台下的仿真结果。从中可以看出,整车确实按照路面要求,即循环工况要求进行了跟踪,说明在改进的正向仿真模型中建立的驾驶员模型是合理的,所选择的控制参数针对该工况来说也是合适的。电机确实按实际要求在加速过程中进行了助力,使发动机可以工作在最佳区域内,
从而使其尽可能降低油耗。
图8 正向仿真模型嵌入ADV ISOR 的仿真结果5 结论
(1)利用ADV I SOR 代码开放性的特点,提出在
ADV ISOR2002平台上开发正向仿真模型的新思路。
(2)改进了原正向仿真模型,主要建立了正向仿真模型的驾驶员模型;并把台架调试的控制策略放入正向仿真模型中,将其嵌入到ADV ISOR2002中运行。
(3)对某一车型进行仿真,结果表明能按正向仿真的思想进行计算,并和实际工况跟踪比较吻合。(4)利用该正向模型及ADV I SOR 本身的优点,可为基于循环工况及实际控制器开发中的主要控制算法研究提供便捷途径。
参考文献
[1] 陈清泉,孙逢春.混合动力车辆基础[M ].北京:北京理工大学
出版社,2001.
[2] 王庆年,何洪文,等.并联混合动力汽车传动系参数匹配[J ].
吉林工业大学学报,2000(1).
[3] Nati onal Rene w ab le Energy Laboratory .ADV I SOR2002H el p Doc -u m en t[G].h tt p://www.ctts .n re.l gov/ana l ysis .2002.
[4] 曾小华,王庆年,等.基于ADVISOR 软件的双轴驱动混合动力
汽车性能仿真模块的开发[J].汽车工程,2003,25(5).[5] 王庆年,曾小华,等.基于ADVISOR 混合动力汽车正向仿真软
件的开发[C ].中国汽车工程学会年会论文集,2003.
[6] 金启前.混合动力客车试验与评价问题研究[D ].长春:吉林
大学,2006.
[7] 王伟华.并联混合动力汽车的控制[D ].长春:吉林大学,2006.[8] 曾小华,王庆年,等.基于ADV ISOR2002混合动力汽车控制策
略模块开发[J].汽车工程,2004,26(4).
[9] 曾小华.军用混合动力轻型越野汽车动力总成匹配控制策略
研究[D].长春:吉林大学,2002.
车辆动力学主要仿真软件 I960年,美国通用汽车公司研制了动力学软件DYNA主要解决多自由度 无约束的机械系统的动力学问题,进行车辆的“质量一弹簧一阻尼”模型分析。作为第一代计算机辅助设计系统的代表,对于解决具有约束的机械系统的动力学问题,工作量依然巨大,而且没有提供求解静力学和运动学问题的简便形式。 随着多体动力学的谨生和发展,机械系统运动学和动力学软件同时得到了迅速的发展。1973年,美国密西根大学的N.Orlandeo和,研制的ADAM 软件,能够简单分析二维和三维、开环或闭环机构的运动学、动力学问题,侧重于解决复杂系统的动力学问题,并应用GEAR刚性积分算法,采用稀疏矩阵技术提高计算效率° 1977年,美国Iowa大学在,研究了广义坐标分类、奇异值分解等算法并编制了DADS软件,能够顺利解决柔性体、反馈元件的空间机构运动学和动力学问题。随后,人们在机械系统动力学、运动学的分析软件中加入了一些功能模块,使其可以包含柔性体、控制器等特殊元件的机械系统。 德国航天局DLF早在20世纪70年代,Willi Kort tm教授领导的团队就开始从事MBS软件的开发,先后使用的MBS软件有Fadyna (1977)、MEDYNA1984),以及最终享誉业界的SIMPAC( 1990).随着计算机硬件和数值积分技术的迅速发展,以及欧洲航空航天事业需求的增长,DLR决定停止开发基于频域求解技术的MED YN软件,并致力于基于时域数值积分技术的发展。1985年由DLR开发的相对坐标系递归算法的SIMPACI软件问世,并很快应用到欧洲航空航天工业,掀起了多体动力学领域的一次算法革命。 同时,DLR首次在SIMPAC嗽件中将多刚体动力学和有限元分析技术结合起来,开创了多体系统动力学由多刚体向刚柔混合系统的发展。另外,由于SIMPACI算法技术的优势,成功地将控制系统和多体计算技术结合起来,发
———————————— 基金项目基金项目::国家自然科学基金资助项目(61163009, 61163010)。 作者简介作者简介::张学军(1977-),男,讲师、博士研究生,主研方向:服务计算,服务仿真;闫光辉、胡晓辉,教授。 收稿日期收稿日期::2013-05-29 修回日期修回日期::2013-07-21 E-mail :zxjly1_new@https://www.doczj.com/doc/953774900.html, 一种环境感知的一种环境感知的仿真服务调度模型仿真服务调度模型 张学军张学军,,闫光辉闫光辉,,胡晓辉 (兰州交通大学电子与信息工程学院,兰州 730070) 摘 要:针对传统分布式仿真框架HLA/RTI 中动态调度负载平衡较差、执行可靠性较低的问题,提出一种基于环境感知的仿真服务调度模型C3SM 。C3SM 模型包含总体结构、调度策略和服务部署。总体结构规定各个模块的功能与交互接口,调度策略采用改进的蚁群算法进行仿真服务的动态调度,服务部署采用重叠覆盖部署策略以保证较好的服务可用性和较低的资源消耗。仿真实验结果表明,与传统分布式仿真框架HLA/RTI 相比,C3SM 模型通过实时获取执行环境的上下文信息,能够获得较优的负载平衡度,且重叠覆盖的仿真服务部署策略使得仿真运行系统的可靠性明显提高。 关键词关键词::环境感知;高层体系结构;分布式仿真;Web 服务;蚁群算法;仿真服务调度 A Context-aware Simulation Service Scheduling Model ZHANG Xue-jun, YAN Guang-hui, HU Xiao-hui (School of Electronics and Information Engineering, Lanzhou Jiaotong University, Lanzhou 730070, China) 【Abstract 】In order to address the problem of traditional distribution simulation framework HLA/RTI with respect to poor load balancing performance in service dynamic scheduling and low reliability of service execution, this paper proposes a Context-aware Simulation Service Scheduling Model(C3SM), which includes general framework, scheduling strategy and service deployment. The framework provides the functions and interaction interfaces of each module. For the scheduling scheme, a modified ant colony algorithm is used to achieve optimum load balancing and system reliability. Moreover, the overlapped coverage deployment strategy is adopted to obtain the high service availability and low resource consumption in the service deployment. Experiments are carried out on performance comparisons between the traditional HLA/RTI and C3SM in the scheduling strategy and the reliability of service performing, the results show that C3SM can obtain good load balance with the real-time context information of the execution environment, and the overlapped coverage simulation service deployment scheme greatly improves the reliability of the simulation execution system. 【Key words 】context-aware; High Level Architecture(HLA); distributed simulation; Web service; ant colony algorithm; simulation service scheduling DOI: 10.3969/j.issn.1000-3428.2014.03.019 计 算 机 工 程 Computer Engineering 第40卷 第3期 V ol.40 No.3 2014年3月 March 2014 ·体系结构与软件技术体系结构与软件技术·· 文章编号文章编号::1000-3428(2014)03-0093-06 文献标识码文献标识码::A 中图分类号中图分类号::TP391.9 1 概述 随着计算机与信息技术的飞速发展,计算机仿真技术在智能交通、航空航天、生物、通信等领域得到了广泛的应用和研究。由于计算机仿真所涉及的问题越来越复杂,仅靠单个仿真系统已无法满足实际仿真需求。目前多种智能手持设备快速发展,具备了较强的计算能和通信能力,可以将多种手持设备与传统的服务器或PC 一起构成一个分布式、异构的智能仿真建模和运行环境。 高层体系结构(High Level Architecture, HLA)是分布式仿真领域的一个软件架构标准,它解决了仿真应用之间可交互性和模型在不同领域重用性的关键问题[1] 。但是,HLA 在应用中存在许多不足:(1)由于存在多个运行时基础设施(Runtime Infrastructure, RTI)厂商,不同厂商的RTI 基于特定的计算机平台与编程语言,互操作性和跨平台能力有限;(2)RTI 在运行时会受到防火墙的限制,使仿真任务无法正常运行;(3)RTI 对系统的容错性支持不足,单一联邦的失效会导致整个仿真任务的失败。 Web 服务(Web service)是一种面向服务的分布式计算模式,具有良好的平台异构性和语言独立性特点,可以与其他分布式计算技术相结合,且其请求和响应不受防火墙限制。因此,可以考虑将Web 服务和HLA 进行结合,克服HLA 的不足,进而构建一个具备一定冗余度的可靠分布式仿真系统。
面向汽车动力学控制的汽车仿真软件开发1 李幼德,刘巍, 李静 吉林大学汽车工程学院 (130022) E-mail :aweii_liu@https://www.doczj.com/doc/953774900.html, 摘 要:汽车动力学仿真软件对汽车电控系统的开发具有重要意义。本文利用Matlab/Simulink 软件编制适用于汽车电控制系统开发的汽车动力学模型,并编制了图形用户界面,并针对样车进行了不同工况的模拟。 关键词:汽车动力学,图形用户界面,仿真 1.引言 随着汽车电子控制系统的发展,特别是汽车电控制系统开发手段的发展,以Matlab/Simulink 和Dspace 为开发平台的V 流程的电控系统开发方法已被越来越多的开发商所采用。在汽车电控制系统的开发中,例如汽车牵引力控制系统(TCS )、汽车制动防抱死控制系统(ABS )和汽车稳定性控制系统(ESP )等,为了研究汽车各控制系统的控制算法,汽车动力学仿真模型是必不可少的。而传统的汽车动力学仿真模型(如Adams 和Simpack 等),由于仿真的实时性较差,并不能够满足汽车电控制系统开发的要求。因此,开发基于Matlab/Simulink 平台的汽车动力学仿真软件对于汽车电控系统具有重要的使用价值。 2.汽车动力学模型 考虑汽车动力学模型运行实时性的要求,汽车动力学模型需要进行适当的简化。因此,忽略汽车的侧倾和俯仰运动,以及悬架的影响,但是考虑了汽车载荷的转移。在汽车动力学模型中,包括:发动机模型、传动系模型、轮胎模型、车轮模型以及整车模型等。 2.1发动机模型 发动机模型的输入包括:油门开度、反馈的发动机转速。整个的发动机将简化为一个一阶惯性环节系统[1]。 1 2 1sT e e T e M sT ?= + (1) 其中:e M 发动机的动态输出力矩;为发动机的静态输出力矩,为系统时间常数,为系统滞后时间常数而拉氏变换变量。 e T 2T 1T s 2.2制动器模型 制动器模型采用的是盘式制动器模型,公式如下: b w T A n s P b μη=????? (2) 1 本课题得到高等学校博士学科点专项科研基金(项目编号:20020183025)资助 - 1 -
软件开发项目配置管理工具的选择 通过软件配置管理,将对软件系统中的多重版本实施系统的管理;全面记载系统开发的历史过程,包括为什么修改,谁作了修改,修改了什么;管理和追踪开发过程中危害软件质量以及影响开发周期的缺陷和变化。并对开发过程进行有效地管理和控制,完整、明确地记载开发过程中的历史变更,形成规范化的文档,不仅使日后的维护和升级得到保证,而且更重要的是,这还会保护宝贵的代码资源,积累软件财富,提高软件重用率,加快投资回报…… 每一个软件项目,无论是工程类项目,还是产品类项目,都必须经历需求分析、系统设计、编码实现、集成测试、部署、交付、维护和支持的过程。在这个过程中,将生成各种各样不同的工件,包括文档、源程序、可执行代码、支持库。更可怕的是,频繁出现的变更是不可避免的,因此面向如此庞大且不断变动的信息集,如何使其有序、高效地存放、查找和利用就成为了一个突出的问题。 针对这一问题,最早的开发人员尝试过的解决办法是通过手工来实现: 1)文档:每次修改时都另存为一个新的文件,然后通过文件名进行区分,例如"XXX 软件需求说明书V1.0,XXX软件需求说明书V1.1,XXX 软件需求说明书V2.0.",并且在文件中注明每次版本变化的内容; 2) 源代码:每次要修改时就将整个工程目录复制一份,将原来的文件夹进行改名,例如"XX 项目V1.0、XX 项目1.01、.",然后在新的目录中进行修改; 但是这种方法,不仅十分繁琐,容易出错,而且会带来大量的垃圾数据。如果是团队协同开发或者是项目规模较大时,还是会造成很大的混乱。很显然,这样简陋的方法是无法应对这一问题的。后来,有人尝试从制造工业领域引入了"配置管理"这一概念,通过不懈的研究与实践,最终形成了一套管理办法和活动原则,这也就是软件配置管理。 通过软件配置管理,将对软件系统中的多重版本实施系统的管理;全面记载系统开发的历史过程,包括为什么修改,谁作了修改,修改了什么;管理和追踪开发过程中危害软件质量以及影响开发周期的缺陷和变化。并对开发过程进行有效地管理和控制,完整、明确地记载开发过程中的历史变更,形成规范化的文档,不仅使日后的维护和升级得到保证,而且更重要的是,这还会保护宝贵的代码资源,积累软件财富,提高软件重用率,加快投资回报。 常见的配置管理工具 正如前面所述,由于软件配置管理过程十分繁杂,管理对象错综复杂,如果是采用人工的办法不仅费时费力,还容易出错,产生大量的废品。因此,引入一些自动化工具是十分有裨益的,这也是做好配置管理的必要条件。 正是因为如此,市场上出现了大量的自动化配置管理工具,这些工具的实现原理与基本机制
人机功效评价解决方案 Jack 人体仿真及建模系统 Jack是一个人体建模与仿真软件解决方案,帮助各行业的组织提高产品设计的工效学因素和改进车间的任务。jack最初是由宾夕法尼亚大学的人类模型和模拟中心(Center for Human Modeling and Simulation at the University of Pennsylvania)开发,目前是西门子PLM旗下的一员。使 用Jack可以: 1、建立一个虚拟的环境 2、创建一个虚拟人 3、定义人体大小和形状 4、把人放在环境中 5、给人指派任务 6、分析人体如何执行任务 从jack获得的信息可以帮助您设计更安全、更符合人体工程学的产品、工作场所和更快的流程和使用更低的成本。 第1步:建立一个虚拟的环境 除了人体建模之外,jack还是是一个功能强大的互动性、 实时视景仿真解决方案。您可以导入CAD数据或从草图
开始建立模型,在周围的环境中移动物体,交互式地改变相机的视图和创建特殊效果,以提高您“现场”的真实性。 导入CAD模型-jack可以导入基于VRML,IGES,立体(STL)的和inventor (iv)文件格式的3D 图形数据。此外,软件提供了减小CAD数据的功能来优化模型,用于实时仿真。OpenGL Optimizer的使用可以在不损害视频保真度的情况下相当程度的减少模型的棱角。 在jack中创建几何图形-jack允许您从草图开始建立模型,用于概念设计。您可以创建简单的几何图形,如立方体、球、圆柱、圆锥和圆环。熟练操作后,您可以合并这些简单的图形成为更加复杂的部件,如机械工具和车辆。jack还提供了一套基本的工具(锤子,钳子,梯子,棘轮,锯,螺丝刀和扳手)。 给您的环境一个真实的外观-jack的视图,纹理映射和照明功能,帮助您赋予您的虚拟环境更有说服力的外观。 在jack中可以很容易地改变视图,通过鼠标按钮可以基于一个参考点,水平或垂直或放大“相机”。此外,您也可以将视图参考点定位到指定的对象上,为某些对象加上相机,如人的眼睛,并建立剖视图。使用纹理映射,基础的图像文件,如云彩、公路、工厂内部或机器的控制面板可用于增加视觉细节场景,而不会增加额外的几何形状。jack的经典照明能力,可以帮助您突出环境中的区域和加强场景的真实感。
多台电梯调度算法设计及仿真 (安庆师范学院物理与电气工程学院安徽安庆 246011) 摘要:根据电梯群控系统的非线性,随机性,不确定性和离散动态性特点,采用面向对象的分析与设计方法和基于事件扫描的数字仿真方法,设计一个多台电梯调度算法,采用 Visual C++技术编程和OpenGL 可视化技术,并通过对电梯群的运行状态进行实时监测与分析,实现高层建筑电梯群调度和载客的活动仿真情况,评价电梯群的服务质量和运行效能。 关键词:电梯群控制系统,多台电梯调度算法,面向对象,数字仿真 1. 引言 电梯是现代立体交通的重要组成部分,随着高层建筑在世界范围内得以迅猛发展,极大地促使了电梯技术的改良和革新。近半个世纪以来,电梯技术已经从原始模型升降机发展到高级智能化电梯。而智能化要求电梯系统服务质量和服务效率能尽量提高建筑的有效利用率和性能。在建筑设计中,同常将多台电梯配置在一起,构成电梯群,集中为大楼提供服务,这就是电梯群控系统(EGCS, Elevator Group Controlystem)【1】。电梯群控系统是一个实时性非常强的系统,需要不断收集梯群的状态信息和厅外的召唤信号,采取一定的派梯策略,选择最合适的电梯去应答厅外召唤。为了节约开发成本,一个成功的电梯群控系统在应用到实际控制系统之前,往往都在计算机系统上进行仿真研究,调试参数,在仿真研究完成以后,在应用到电梯试验塔做实验,检验控制策略的有效性和有关的性能指标。电梯群控系统是通过对电梯群运行状态进行实时监测与分析,再根据不同的实际情况对电梯进行优化调度和合理分配,进而改善和提高电梯系统服务质量和服务效率【2】。 随着智能控制技术在电梯群控系统(EGCS)中的广泛应用,电梯交通系统设计的关键是满足乘客生理上和心理上的承受力,有效地解决高层建筑复杂的楼内垂直交通。一个设计良好的电梯群控系统必须具备在客流高峰时确保乘客在较短的侯梯时间和乘梯时间内到达目的地,在空闲时使电梯群运行消耗能量最低。我国电梯配置和电梯系统特征的研究与国外相比还处于落后的状态,虽然国内与1990年对电梯系统的动态特性进行了研究,但在电梯群控方面,仍有许多理论及技术问题亟待解决,因此开展电梯群控算法研究具有重要的理论和实际意义,这对电梯群控系统性能(安全性,舒适性等)是十分必要的,同时也可以改变我国目前电梯技术主要依赖于进口的不利局面【3】。 用计算机仿真研究电梯群的服务质量和运行效能,大楼的层高不要超过25层,电梯的总台数不要超过八台。设某办公大楼楼层为20层,有载客电梯5部(用电梯1—电梯5标识)。利用Visual C++技术编程和OpenGL可视化技术实现高层建筑电梯群调度和载客的活动仿真情况。 2.设计方案 2.1 设计规则: 为了实现电梯群调度和载客的活动仿真情况,采用两种方式对其仿真:(1)人工控制方式;(2)自动控制方式。 2.1.1人工控制方式: 这种方式是完全仿真真实电梯群情况,乘客自己决定到达电梯时候和选择需要到达的楼层以及电梯的开关门。这种方式通过可视化技术可以直观的观察乘客发送电梯请求后,电梯群的调度情况和各电梯的当前状态,包括电梯内人数,电梯运行趋势,电梯开关门状态和电梯所在楼层。这种方式下电梯群调度遵循的规则为:
第二包:汽车仿真教学软件 1、模块组成: 应包括电控发动机、自动变速器、底盘系统、电气系统、汽车常规维护、车载网络系统等模块。 2、功能要求: (1)能够完整展示汽车发动机、底盘和电气系统各总成及零部件结构; (2)能够交互式演示汽车发动机、底盘和电气系统的基本工作过程; (3)能够交互式演示汽车常规维护的基本工艺流程; (4)能够完整展示汽车车载网络系统的组成、原理及检修方法。 3、技术要求: (1)网络版,采用C/S架构; (2)结构展示应采用3D表达,原理演示采用交互式动画进行表达; (3)所有模块都须提供单机版供离线使用; (4)发动机系统模块要求至少具备2种类型,包括电控汽油机和电控柴油机;应至少提供直列4缸和V型6缸电控汽油机各一款,SDI和TDI电控柴油机各一款; (5)底盘系统模块须具备手动变速器、自动变速器、制动系统和转向与悬架四个部分内容;应至少提供二种以上主流车型的自动变速器、ABS系统(包括ABS和ABS+EBD)、助力转向系统(包括液压动力转向和电动助力转向)、悬架(包括麦式悬架、多连杆悬架和电控悬架); (6)电气系统模块要求包含起动、充电、照明、防盗、雨刮、电动车窗、安全气囊等模块;应具备两种以上主流车型的空调系统(包括手动空调和自动空调); (7)所有模块必须进行现场演示。
附件二: 1、模块组成: 应包括汽车二级维护虚拟实训、总成拆装虚拟实训、故障诊断虚拟实训、车身测量虚拟实训等模块。 2、二级维护虚拟实训模块功能要求: (1)能够对维护车辆设置常见故障点50以上; (2)具备工具使用功能; (3)实训过程能够随时查阅各种资料;(4)具备填写检测结果的功能; (5)具备实训过程中操作自动记录功能。 3、总成拆装虚拟实训模块功能要求: (1)能够实现丰田8A发动机拆装实训功能; (2)具备总成大修功能,包括总成分解、零部件清洁和检查、重新组装等;(3)具备零部件检验功能,可对拆卸后的零部件进行测量检验; (4)提供各种工具使用功能; (5)具有对实训过程中操作进行记录的功能。 4、故障诊断虚拟实训模块功能要求: (1)具备故障诊断实训示范和实训练习功能; (2)具备两种故障点设置功能,包括随机设置和人工设置; (3)软件应具备模拟路试功能,在路试时可读取故障码和动态数据流; (4)能够模拟诊断仪读取故障码、读取定格数据、读取动态数据和主动测试,模拟示波器检测各种信号波形,模拟尾气分析仪检测不同工况下的尾气数据,模拟燃油压力表检测燃油系统压力,模拟气缸压力表检测各个气缸的压力,模拟真空表检测进气歧管的真空度,模拟万用表检测电阻和电压; (5)软件具备实训过程操作记录功能,可自动记录或手动记录; (6)具备常用工具使用功能; (7)软件应支持环境参数设置,包括环境温度、大气压力、机油液位、发动机冷却液液位等。 5、车身测量虚拟实训模块功能要求: (1)采用卡尔拉德车身测量系统; (2)提供20个以上测量点; (3)配置向导操作模式功能,可以引导用户按照汽车车身测量的标准工作流程进行操作。 6、各系统虚拟实训模块技术要求: (1)网络版,采用C/S架构; (2)实训车间场景采用3D实时渲染技术,可实现场景内360度旋转; (3)维护实训内容涵盖汽车二级维护的全部作业项目; (4)软件能够模拟汽车运行时的各种声音,包括发动机起动、怠速运转、加速、运行粗暴、运行抖动等; (5)总成拆装台架采用3D技术,可以进行360度方向任意翻转;( 6)支持单点故障设置和多点故障设置,多点故障设置每次可设置3个以上故障点; (7)故障点要求涵盖电路断路/短路、器件损坏、间歇性断路和机械故障等;(8)故障诊断模块能够设置常见故障点80个以上;
Assignment Vehicle system dynamics simulation 学院:机电学院 专业:机械工程及自动化 姓名: 指导教师:
The model we are going to analys: The FBD of the suspension system is shown as follow:
According to the New's second Law, we can get the equation: 2 )()(221211mg z z c z z k z m --+-=???? 221212)()(z k mg z z c z z k z m w +-----=? ??? 0)()()()(222111222111=-++--+-++--+? ? ? ? ? ? ? ?w w w w z L z k z L z k z L z c z L z c z m χχχχ 0)()()()(2222111122221111=-++----++---? ? ? ? ? ? ? ?w w w w z L z L k z L z L k z L z L c z L z L c J χχχχχ d w w w w Q z L z k z L z c z m ,111111111)()(-=------? ? ? ? ?χχ d w w w w Q z L z k z L z c z m ,222222222)()(-=-+--+-? ????χχ When there is no excitation we can get the equation: 2)()(221211mg z z c z z k z m --+-=???? 2 21212)()(z k mg z z c z z k z m w +-----=? ??? Then we substitude the data into the equation, we write a procedure to simulate the system: Date: ???? ?? ??? ??==?==?===MN/m 0.10k m 25.1s/m kN 0.20MN/m 0.1m kg 3020kg 2100kg 3250w 2l c k I m m by w b
第一章promodel简介 promodel 是一套功能相当强且容易使用的数据及图型导向系统仿真软件,它提供模块(module)的观念及操作方式让使用者可弹性的设计多种生产系统并进行仿真及分析。从小型化工厂(small job shops),大型工厂生产(large mass production)及先进的柔性弹性制造系统(flexible manufacturing system)皆可容易的规划及模拟。 Promodel系统中提供使用者人性化的操作接口环境。只要利用鼠标或键盘根据功能项目选择所需的构建工具(location & resource)、工作组件(part)及操作设定(operations),就可以不需撰写任何程序(此乃相对于一些高阶仿真语言如SLAM等而言),而完成一系统仿真的环境。另外软件更提供使用者可测试追踪(trace)系统内每个操作步骤、每个工作站、工作母机执行的情形。因此使用者在开发中即可方便的进行测试与除错,并于完成是可动态的撷取其所需点的使用情形。 因此,哪怕系统大到2000格操作机、工作站及几千几百的操作流程都能在极短的时间内完成开发、测试的工作或根据统计的数据调整系统内各资源的工作量及操作速度等设定参数,以达到系统所设定目标之最佳化。 在定义整个系统的输入输出因子、组装、包装、加工等作业流程,甚至流程的逻辑及运作优先规则时,都能借着设定参数或利用条件变量而弹性调整,也可以利用外在的程序语言控制,来改变系统的状态。例如:在仿真整个工厂的生产流程中:人员、机器、物料、无人搬运车(AGV)、夹具、机器手臂(robot)、输送带(conveyor),都能利用系统提供的传输模块以设定其速度、容量、加速度、运作顺序、方向等。 在规划设定好系统后,于仿真执行前,promodel会先行测试系统,检查各相关工作站输入、输出是否平衡。假如有忘记设定的容量、速度等,系统都能自动帮使用者假设并询问意见,如果不满意可以再修改。真正在模拟的时候又可随时观察各资源(resource)使用情形。使用者可追踪系统运作流程,随时中断仿真,并藉系统仿真后,所产生的运作过程统计数据,统计各工作站、资源使用率等。此外promodel也提供简单且易读的统计图、统计报表文件,因而可方便的了解全部资料利用的情形。一些常见的promodel应用包括:1.产能规划 2.瓶颈分析 3.厂房布置 4.生产排程 5.“日本JIT”系统规划 6.生产周期分析 此外promodel 又可让设计者藉调整工作站数量、速度、输入方式、输出方式(如:批次),以作整体系统的各种可能状况下的评估,以作为将来真正建造设计时的参考,使用及分析弹性相当宽广。 Promodel 不仅应用于生产领域,它可以用于仿真任何一种离散时间流程系统。例如:港口、供应链系统、分销系统以及其他一些物流系统。
基于LTE的系统级仿真平台设计 许猛 北京邮电大学信息与通信工程学院WCSN实验室,北京(100876) Email: xumengbupt@https://www.doczj.com/doc/953774900.html, 摘要:在无线通信系统实际部署之前,要对它进行充分的研究与评估,系统级仿真是全面考察系统整体性能的最常用手段。本文主要讨论了系统级仿真的基本方法,介绍了系统级仿真的分类:静态仿真和动态仿真,并对系统级仿真的原理进行了详尽的阐述,给出了系统级仿真与链路级仿真的接口的设计。以LTE系统为例,介绍了系统级仿真的基本流程,给出了系统级仿真的各个模块的基本模型,如小区模型、天线模型、路径损耗模型、调度模型、链路自适应模型等,详细阐述了系统级仿真的整个过程。 关键词:LTE;系统级仿真;调度 中图分类号:TN92 1.引言 近年来,移动通信的发展十分迅速,人们的需求从以简单的语音通话,慢慢向着多媒体方向转变,如数据、图像、传真等。随着用户需求的转变,新的通信系统层出不穷。从第一代的模拟通信系统,发展到第二代的窄带数字移动通信系统,如GSM,CDMA等,再到第三代的宽带移动通信系统(3G),如TD-SCDMA、WCDMA及CDMA2000,以及下一代移动通信系统LTE,每一阶段都极大改善了用户的服务质量,提供了更加丰富的业务。[1] 通信系统部署之前,需要对其进行充分的评估,掌握系统的整体性能,才能更好的部署,提供更好的通信服务。系统级仿真提供了评估系统性能的一个很好的平台。利用系统级仿真平台模拟系统的工作过程,可以得到系统的网络容量、覆盖分析等指标,从而合理的估计网络的规模及投资的规模,控制建设成本。[2] LTE(Long Term Evolution,长期演进)项目是3G的演进,始于2004年3GPP的多伦多会议。LTE并非人们普遍误解的4G技术,而是3G与4G技术之间的一个过渡,是3.9G的全球标准,它改进并增强了3G的空中接入技术,采用OFDM和MIMO作为其无线网络演进的唯一标准。在20MHz频谱带宽下能够提供下行326Mbit/s与上行86Mbit/s的峰值速率。改善了小区边缘用户的性能,提高小区容量和降低系统延迟。本文主要以LTE系统为背景,介绍了系统级仿真的原理与方法。[5] 2 .系统级仿真原理及仿真框架 系统级仿真是对用户和系统行为的拟合,是从整个系统(包含多个小区和用户)的角度分析系统的覆盖、容量和系统的性能,对于系统的参数设置给予定量的分析,为无线网络的规划优化提供依据。[2] 系统级仿真方法有两种,分别为静态仿真(Static Simulations)和动态仿真(Dynamic Simulations)。静态仿真通过需要对快照(Snapshot)的分析来了解网络性能,他需要一定数量的网络快照。动态仿真就是让真实环境中用户和系统采取的主要行为方式在系统级仿真中都得到具体的模仿性体现。比如用户的起呼,掉话,行进,转弯,切换等,在这些动态行为的基础上,用统计的方法计算所要求的参数和结果。[2] 系统级仿真结果要依赖与链路级仿真的结果。链路层接口将系统级结果映射到物理层参数上去,有两种常用的方法:一种是链路级和系统级联合仿真,对系统信息进行实时的处理,
advisor2002仿真软件 ADVISOR(Advanced VehIcle SimulatOR,高级车辆仿真器)是由美国可再生能源实验室NREL(National RenewableEnergy Laboratory)在MATLAB和SIMULINK软件环境下开发的高级车辆仿真软件。 该软件从1994年11月份开始开发和使用,最初是用来帮助美国能源部DOE(DepartmentofEnergy)开发某混合动力汽车的动力系统,随后功能逐渐扩展,目前最新的正式版本ADVISOR2002可以对传统汽车、纯电动汽车和混合动力汽车的各种性能作快速分析,是世界上能在网站上免费下载和用户数量最多的汽车仿真软件。由于该软件通过大量的实践被证实具有较好的实用性,现在世界上许多生产企业、研究机构和高校都在使用该软件做汽车仿真方面的研究。 ADVISOR是MATLAB和SIMULINK软件环境下的一系列模型、数据和脚本文件,它在给定的道路循环条件下利用车辆各部分参数,能快速地分析传统汽车、纯电动汽车和混合动力汽车的燃油经济性、动力性以及排放性等各种性能。此外,该软件的开放性也允许对用户自定义的汽车模型和仿真策略做仿真分析。它主要有以下特点: (1)仿真模型采用模块化的思想设计。ADVISOR软件分模块建立了发动机、离合器、变速器、主减速器、车轮和车轴等部件的仿真模型,各个模块都有标准的数据输入/输出端口,便于模块间进行数据传递,而且各总成模块都很容易扩充和修改,各模块也可以随意地组合使用,用户可以在现有模型的基础上根据需要对一些模块进行修改,然后重新组装需要的汽车模型,这样会大大节省建模时间,提高建模效率。 (2)仿真模型和源代码全部开放。ADVISOR2002的仿真模型和源代码在全球范围内完全公开,可以在网站上免费下载。用户可以方便地研究ADVISOR的仿真模型及其工作原理,在此基础上根据需要修改或重建部分仿真模型、调整或重新设计控制策略,使之更接近于实际情形,得出的仿真结果也会更合理。 (3)采用了独特的混合仿真方法。现在的汽车仿真方法主要有前向仿真和后向仿真两种,仿真软件也多采用其中的一种方法,使两种方法优劣不能互补,而ADVISOR采用了以后向仿真为主、前向仿真为辅的混合仿真方法,这样便较好地集成了两种方法的优点,既使仿真计算量较小,运算速度较快,同时又保证了仿真结果的精度。 (4)在MATLAB和SIMULINK软件环境下开发研制。MATLAB是世界上顶尖的可视化科学计算与数学应用软件,其语法结构简单、数值计算高效、图形功能完备,集成了诸多专业仿真工具包,而且它还提供了方便的应用程序接口(API),用户可以在MATLAB环境下直接调用C、Fortran等语言编写的程序。MATLAB 内置的计算程序、专业的仿真工具以及与其他应用程序的接口,会减少汽车模型的搭建和仿真计算过程中工作量,同时也方便了熟悉不同编程语言的用户之间的合作。 (5)能与其他多种软件进行联合仿真(Co-simulation)。汽车是一个复杂的系统,其仿真更是涉及机械、电子、控制等多个领域,工作量很大,ADVISOR软件开发过程中也难以涉及所有领域,这样就限制了它一些功能的实现。但是ADVISOR设计了开放的软件接口,能与Saber、Simplorer、VisuaDOC、Sinda/Fluint等软件进行联合仿真,为用户改进和拓展其功能提供了方便。
几种常用软件开发工具比较(2008-10-27 10:11:59) 标签:职场it [转]近日和公司的系统分析员探讨了几种开发工具的特性,由其总结了下面的内容。 文章客观评价了各种开发工具的优缺点,本人把文章拿来和大家一起讨论一下,欢迎专业人事补充和指正。 一、跨平台特性 VB:无★ PB:WINDOWS家族, Solaris,Macintosh ★★★ C++ Builder/Dephi:WINDOWS家族,Linux ★★★ VC:无★ JAVA:所有能够运行JAVA虚拟机的操作系统★★★★ 二、组件技术支持 VB:COM,ActiveX ★★★ PB:COM,JavaBean,Jaguar,UserObject使用:CORBA+Acti veX ★★★ C++ Builder/Dephi:COM, ActiveX CORBA(本身自带CORBA中间件VisiBroker,有丰富向导)★★★★★ VC:COM,ActiveX,CORBA(没有任何IDE支持,是所有C编译器的功能,需要CORBA中间件支持) ★★★ JAVA:JavaBean,CORBA;ActiveX ★★★★ 三、数据库支持级别 数据访问对象: VB:DAO,ADO,RDO功能相仿;★ PB:Transaction,DwControl,可绑定任何SQL语句和存储过程,数据访问具有无与比拟的灵活性★★★★ C++ Builder/Dephi:具有包括DataSource,Table,Query,Midas,ADO在内的二十多个组件和类完成数据访问★★★ VC:同VB,但有不少类库可供使用,但极不方便,开发效率很低★★ JAVA:JAVA JDBC API,不同的IDE具有不同的组件★★ 数据表现对象: VB:DBGriD,与数据库相关的数据表现控件只有此一种,只能表现简单表格数据,表现手段单一★ PB:DataWindow对象(功能异常强大,其资源描述语句构成类似HTML的另外一种语言,可在其中插入任何对象,具有包括DBGrid在内的数百种数据表现方法),只此一项功能就注定了PB在数据库的功能从诞生的那 一天起就远远超过了某些开发工具今天的水平★★★★★ C++ Builder/Dephi:具有包括DBGrid,DBNavigator,DBEdit,DBLookupListBox在内的15 个数据感知组件,DecisionCube,DecisionQuery在内的6个数据仓库组件和包括QRChart, QRExpr在内的20多个报表组建,可灵活表现数据★★★
一、物流系统建模与仿真软件简介 由于物流系统变得越来越复杂并且内部关联性越来越强。仿真是公司检验其物流系统及决策是否真的高效的唯一可用技术了。在设计一个新的工厂或系统,对已由系统添加新设备或重新优化,仿真都是非常必要的。同时仿真还用来提供直觉的和经验的决策支持。在当今市面上,仿真可用使用专用软件来实现。由于存在着如此多的仿真软件,如何正确的选择软件至关重要。下面列举出典型的系统仿真软件[3]。 软件名称简介 (1)20-sim 20-sim是由Twente大学控制实验室开发的运行于Windows系统下的建模与仿真软件。作为著名软件包TUTSIM的后续产品,它完全支持图形建模,让用户在直观和友善的方式对动态系统进行设计和分析,同MATLAB和Simulink可以方便的进行建模与仿真的交互。使用20-sim,我们可以仿真动态系统(例如电力、机械、水动力系统或它们的组合系统)的各种行为。 (2)arena该软件可以用来模拟服务、制造、运输、物流、供应链和其它系统。(3)Automod该软件提供了真实的三维虚拟现实动画,使得仿真模型非常用以理 解;提供了高级的特征让用户可以仿真复杂的活动,如机器人、设 备工具、生产线等的运动和转动。该软件还为用户提供了一套基于 专家系统的物料搬运系统,它是根据工业自动化的真实运行经验开 发的。这些包括输送链、自动存储和检索系统,桥式起重机等。(4)Awesim Awesim提供生产系统动态模型的仿真机。动画使用图形界面构建, 用户可以对交互式仿真进行特定的控制。 (5)Easy5由波音公司开发的用来模拟和仿真包含水力、风力、机械、热、电 子和数字等子系统的动态系统软件包。包括了一整套控制系统建 模、分析和设计功能。 (6)Idef该软件是一种流程图析软件,可以非常容易的适用流程图来绘制和 表述流程。它能够提供比传统流程图更多的信息。流程中包含的流 程、流程约束、人和其他资源能够被整合到一起。 (7)Intrax该软件能够提供许多被建模和仿真实际流程的管理决策。它能够被 用来执行战略(同战略视图,同步价值链视图相符合的现实),流 程改善(工序改善、生产力改善、节约循环时间),同步价值链(动 态视觉,同步约束)和日常运作(可对比的运作替代方案,短期变 化影响力的检验)等的模拟和仿真。 (8)Manufacturing Engineering 该软件提供离散仿真功能来解决制造问题和设计制造方案。它在广阔的应用领域中预测产出率,人工和其他的绩效。 (9)Matlab该软件是组合的数字计算、高级图形技术和可视化、高级编程语言 的集成计算机算环境。Simulink式用来对动态系统进行建模、仿真 和分析的交互式工具。它可以构建图形化的结构图,模拟动态系统, 评估系统绩效和精炼设计。 (10)Modsim该软件可以用来仿真像港口,铁路网和航空管制等的管理模型。还 可以用来仿真制造系统。 (11)Promodel该软件可以对制造系统、仓储系统和物流系统的评估、规划或重新 设计进行仿真。典型应用包括精益制造的实施,周期事件的降低, 设备投资决策,产出率和能力分析,识别和排除瓶颈,资源分配等。
炼钢物流调度仿真模型分析 【摘要】生产调度系统是炼钢车间制造执行系统中的重要组成部分,它根据供应(炼钢)的状况和交付(热轧)的需求,控制冶炼、精炼和连铸作业工序的生产节奏,使工序间的物流传递满足生产工艺要求,确保生产的顺利进行。本文分析炼钢车间生产调度系统的外部环境,运用面向对象技术建立炼钢生产物流调度仿真对象模型。 【关键词】炼钢;调度;面向对象;仿真 1钢铁生产工艺流程介绍及分析 现代钢铁生产流程较为复杂,涉及的工序很多,一个典型钢铁企业的生产流程可以分为三大部分:炼铁(Iron Making)区域、主炼钢(Primary Steelmaking)区域和精整加工(Finishing)区域,其中主炼钢区域包括炼钢、连铸、热轧等工序,精整加工区域包括冷轧、镀涂等工序 2炼钢生产系统结构分析 2.1系统静态结构 图1表现的系统结构模型通过类与类之间的关系反映出系统的基本框架。图1中,我们根据炼钢车间生产调度系统作用和其外部环境的特点,抽象出作业计划、生产调度和物料跟踪3个核心类。 (1)作业计划类接受生产订单并将其分解为任务单元、平衡设备能力、指派加工设备、编制浇次计划和炉次计划。与其相关联的实体有工具、原料、设备、工艺路线以及匹配规则等。 图1炼钢车间生产调度系统类图 (2)生产调度类解决设备资源占用冲突,确保物流状况符合作业计划的要求,根据生产实绩数据及时更新相关状态。它包括资源协调、设备匹配和问题识别等3个子类,分别对应于生产调度系统中的资源状况竹理、炉次设备指派、动态调整等3个方面的功能。 (3)物料跟踪类从过程控制系统或人机交互系统采集生产实绩数据,进行显示和分析整理,并向生产调度模块提供所需的生产实绩数据。 2.2系统动态结构
!汽车动力学发展历史简介 汽车动力学是伴随着汽车的出现而发展起来的 一门专业学科。人们很早就认识到“$%&’()*+”转向和应用弹性悬架可使乘客感到更加舒适等基本原 理[,],但那只是一种感性的认识。在各国学者的不懈 努力下,这门学科逐渐发展成熟。-’.’/在,00#年1)’%23举行的题为“车辆平顺性和操纵稳定性”的会议上发表的论文,对,00"年以前汽车动力学的发 展做了较为全面的总结[ !],见表,。近年来汽车动力学又有了进一步发展,大量的高水平学术论文和经典的汽车动力学专著相继被发表,而且开发出许多专为汽车动力学研究建立模型的软件,如美国密西根大学开发的$456%*(、$45678)等商业软件。汽车是一复杂的连续体系统,要想对其进行动力特性的预测和优化需建立经合理简化的抽象汽车模型,以达到缩短产品开发周期、保证整车性能指标和降低产品成本的目的。 "汽车动力学模型的发展 汽车动力学从严格意义上来讲包括对一切与车 辆系统相关运动的研究,然而最为核心的是平顺性和操纵稳定性这两大领域,一般认为平顺性主要研究影响车身的垂向跳跃、俯仰、侧倾振动的因素,而操纵稳定性主要研究车辆的横向、横摆和侧倾运动。建模时一般假设平顺性和操纵稳定性之间无偶合关系。 "#!汽车平顺性模型 在汽车平顺性的早期研究阶段,限于当时数学、 力学理论、计算手段及试验方法,把系统简化成集中质量—弹簧—阻尼模型,如图,所示。 图,整车集中质量—弹簧—阻尼模型 此类模型一般先以函数的形式给出其动能!和势能"以及表达系统阻尼性质的物理量耗散能 !的表达式: 【摘要】汽车动力学包括对一切与车辆系统相关运动的研究,其最核心的是平顺性和操纵稳定性这两大领域。在简要说明了汽车动力学发展过程的基础上介绍了平顺性和操纵稳定性两大领域的模型发展过程。平顺性模型主要经过集中质量—弹簧—阻尼模型、有限元模型和动态子结构模型阶段;而操纵稳定性模型从低自由度线性模型、非线性多自由度模型发展到多体模型。最后提出了汽车动力学仿真模型的发展动向。 主题词:汽车动力学模型发展 中图分类号:9:;,<,文献标识码:$ 文章编号:,"""=#>"#(!""#)"!=""",=": $%&%’()*%+,(-.%/01’%$2+3*0140*5’3,0(+6(7%’ ?2*+.@’8A?2*+.B8+.2*8AC48D*8/8+AB8*D6+.E’8 (B8/8+9+8F’(785G ) 【89:,;31,】H’28%/’IG+*)8%7754I8’7*//)6F’)’+57(’/’F*+556F’28%/’7G75’)*+I 857%6(’8752’5J6E8’/I76E (8I’K *L8/85G *+I 2*+I/8+.75*L8/85G<1+52’M*M’(AI’F’/6M8+.M(6%’776E )6I’/76E F’28%/’(8I’*L8/85G *+I 2*+I/8+.75*L8/85G *(’8+K 5(6I4%’I *E5’(I’F’/6M)’+5%64(7’6E F’28%/’IG+*)8%78778)M/G 8+5(6I4%’I
相关主题
文本预览