自动寻峰
由于谱结构的复杂和统计涨落的影响,从谱中正确地找到全部存在的峰是比较困难的。尤其是找到位于很高本底上的弱峰,分辨出相互靠得很近的重峰更为困难。
谱分析对寻峰方法的基本要求如下:
(1) 比较高的重峰分辨能力。能确定相互距离很近的峰的峰位。
(2) 能识别弱峰,特别是位于高本底上的弱峰。
(3) 假峰出现的几率要小。
(4) 不仅能计算出峰位的整数道址,还能计算出峰位的精确值,某些情况下要求峰位的误差小于0.2道。
很多作者对寻峰方法进行了研究,提出了很多有效的寻峰方法。
目的:
判断有没有峰存在
确定峰位(高斯分布的数学期望),以便把峰位对应的道址,转换成能量
确定峰边界——为计算峰面积服务(峰边界道的确定,直接影响峰面积的计算)
分为两个步骤:谱变换和峰判定
要求:支持手动/自动寻峰,参数输入,同时计算并显示峰半高宽、精确峰位、峰宽等信息,能够区分康普顿边沿和假峰
感兴区内寻峰
人工设置感兴趣大小,然后在感兴区内采用简单方法寻峰
重点研究:对感兴区内的弱峰寻峰、重峰的分解
对于一个单峰区,当峰形在峰位两侧比较对称时,可以由峰的FWHM计算峰区的左、右边界道址。峰区的宽度取为3FWHM,FWHM的值可以根据峰位m p由测量系统的FWHM
刻度公式计算。由于峰形对称,左、右边界道和峰位的距离都是1.5FWHNM 。
)5.0FWHM 5.1(INT p L +-=m m )
5.0FWHM 5.1(INT p R ++=m m
式中m p 是峰位,INT 的含义是取整数。
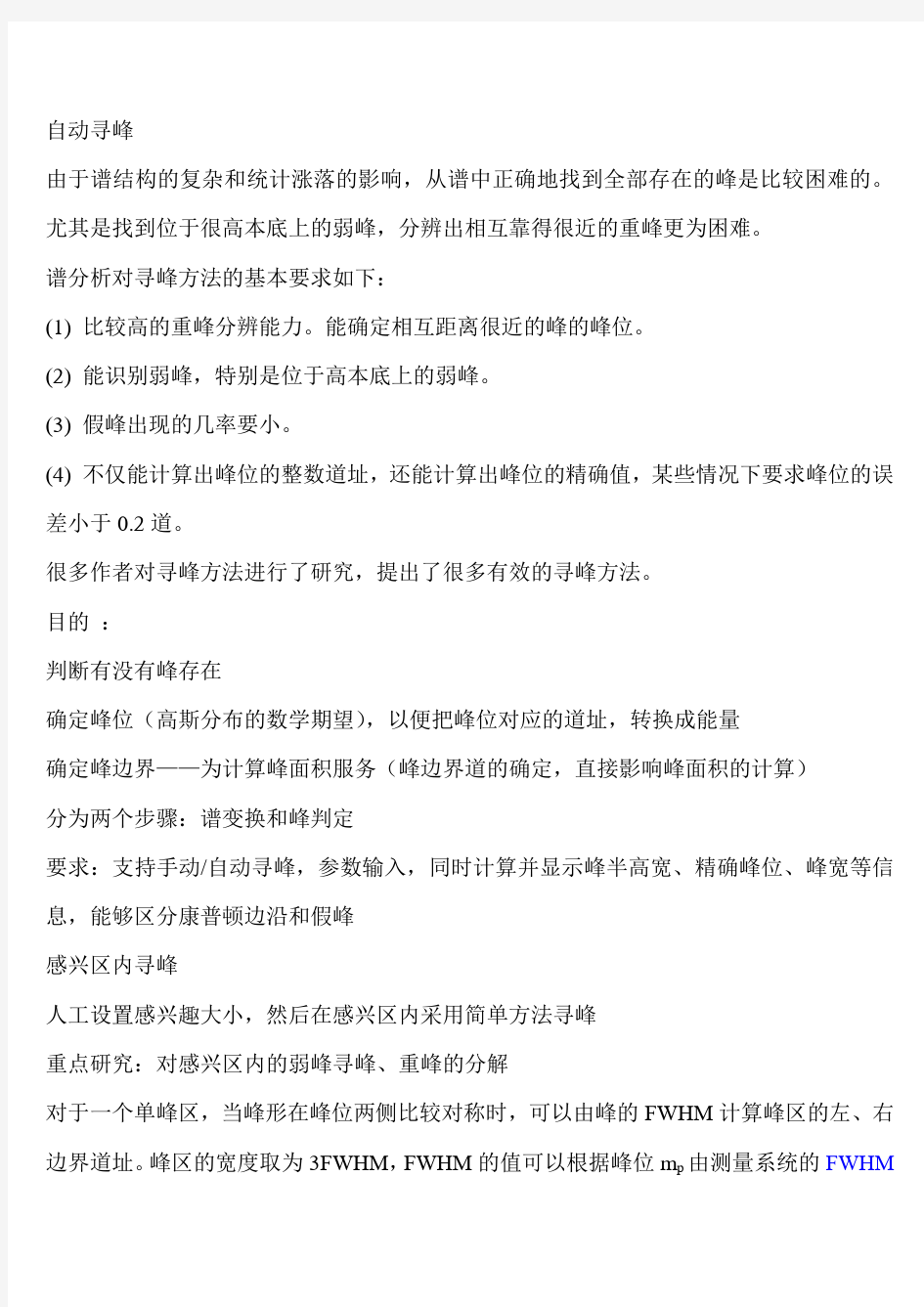
对于存在有低能尾部的峰,其峰形函数描述(参见图)。
]
2/)([H 22p m σ--=m m EXP y ,m ≥mp -J
]
2/)22([HEXP 2p m σ+-=J m m J y ,m ≤mp -J
式中H 为峰高,mp 为峰位,σ是高斯函数的标准偏差,J 为接点的道址和峰位之间的距离。在峰位的左侧,有一个接点,其道址为mp -J 。在接点的右侧,峰函数是高斯函数。在接点的左侧,峰函数用指数曲线来描述。这时峰区的左、右边界道址为
)
5.05.0/FWHM 12.1(INT 2p L +--=J J m m
)
5.0FWHM 5.1(INT p R ++=m m
带有低能尾部的峰函数的图形
全谱自动寻峰
基于核素库法:能量刻度完成后,根据核素库中的能量计算对应的道址,在各个道址附近(左右10道附近)采用简单的寻峰方法(导数法) 方法:
根据仪器选择开发
IF 函数法/简单比较法(适于寻找强单峰,速度快)
满足条件:m i i i m i data data k data data +->-< 可认为有峰存在 然后在data i-m 至data i+m 中找最大值,对应的道值即为峰位 k :找峰阈值,根据高斯分布,一般k 取值1—1.5 常用5点、7点极大值法(m 取2,3) 判定峰是否有意义
一般,用R=N0 / Nb ≥ R0确定峰是否有意义 R 为峰谷比, R0为设定值 (经验值) N0为净峰幅度与基底之和 Nb 为基底计数
int CMmcaView::SearPeakCompare(int Beginch, int Endch, int m, float k) 高斯乘积函数找峰法(可靠性差,不建议采用) 描述谱峰形状的函数主要是高斯函数[]
2202/)(ex p 2)(σσ
πi i A
i G --=
则由相邻的数据点定义一个新的函数(第一高斯乘积函数,只与σ2.3556FWHM =有关):
2)092.11ex p()()2()1()()(2
≥=+--+=
m H
m
m i G i G m i G i G i P m m 是步长(用道表示),是高斯乘积函数的阶数,则Pm(i)称为第m 阶高斯乘积函数。找峰的灵敏度与m 有关,随m 的增加灵敏度提高。
为避免基线参数的影响,最好扣除本底后,再应用高斯乘积函数找峰。 考虑统计涨落的影响,把判断无峰存在的1变为一个“单位带”。即峰的判断为:
3)
/1(/1)(≥????
?+>±≤=k y k y k i P i i
m 有峰
无峰
峰位的确定:由Pm(i)过1的两点求平均来确定;峰边界的确定:“单位带”下限的两个最端点;半高宽的确定:函数Pm(i)在“1”上的截距;组合峰的确定:在乘积函数的两个峰之
间没有处于“带内”的乘积函数值 导数法(一阶、二阶、三阶)
∑-=+=
m
m
j j i j
m
i
y C
N y 1'
Nm 为规范化常数,Cj 平滑的变换系数。 3次多项式5点光滑一阶导数公式:(可以采用)
)88(12
1
2112'++---+-=
i i i i i y y y y y 峰位确定:一阶导数值由正变负=0处;峰边界确定:一阶导数由负变正=0处
CalculateDifferential(0, size, m, differ); for (int j = m; j <= size-m; j++) {
for(int i=1;i<=m;i++) {
if(differ[j-i])>0&&differ[j-i]>maxtemp) {maxtemp=differ[j-i]; nmax=j-i;} if(differ[j+i])<0&&differ[j+i] if ((nmin-nmax)>0.8*fwhm && (nmin-nmax)<3*fwhm ) //FWHM 参数根据仪器能量分辨率可人工确定,fwhm~20 peakposition[p++]=j+0.5;//保持峰位对应的道址 } 5点光滑二阶导数公式(软件中推荐采用) )222(7 1 2112''++--+---=i i i i i i y y y y y y //7点二阶导数 (5*(countsdata[j-3]+countsdata[j+3])-3*(countsdata[j-1]+countsdata[j+1])-4*countsdata[j])/42; )0.220.670.580.580.670.22(0.2521 321123'+++----++--= i i i i i i i y y y y y y y 软件中推荐采用11点以上的公式 峰位确定:二阶导数最小值对应的道址;峰边界确定:二阶导数正极大值点 for (int j = m; j <= size-m; j++)//m~30 { int maxtemp=-0.5,mintemp=-0.5; If(differ[j]<-0.05) for(int i=1;i<=m;i++) { if(differ[j-i]>maxtemp) {maxtemp=differ[j-i]; nmax=j-i;} if(differ[j+i]>mintemp) {mintemp=differ[j+i]; nmin=j+i;} } if ((nmin-nmax)>0.8*fwhm && (nmin-nmax)<3*fwhm ) //FWHM 参数根据仪器能量分辨率可人工确定,fwhm~20 peakposition[p++]=j+0.5;//保持峰位对应的道址 } σ σ/:Derivative 2 of ce Significan ;2nd 2 /121 1 1i k k j j i j k j k j j i j i j j i j i i i i D S n c n c D n c n n n D =? ?? ???=== -+-=∑∑∑-=+=-=+-=+- ()6 -j 22 2122210 c upto Go :k .peak width assumed the is p where exp 100=-? ?? ? ??-=p j p j p c j 试验:系列1为处理后的原始能谱,系列2为5点一阶导数,系列3为5点二阶导数,系列4为对称零面积法寻峰 Peak ‘found’ when S > Threshold 只要选择好合适的寻峰阈值,足以满足准确寻找到全能峰,并剔除假峰(如康普顿边沿,反散射峰) 5点光滑三阶导数公式判定各感兴区是单峰还是重峰 )22(2 1 2112'''++--+-+-=i i i i i y y y y y 峰位确定:三阶导数由负变正=0处;峰边界确定:三阶导数由正变负=0处 判定峰是否有意义0.8FWHM ≤ N ≤ 3FWHM 峰高判定条件 σ≥'-/||5.0m ax e ym TRH y p m 这个公式就是在一阶导数法寻峰程序中实际应用的峰高判定条件。 CalculateDifferential(Beginch, Endch, m, differ); int CMmcaView::SearPeakDifferential(int Beginch, int Endch, int fwhm, int differ[], int m) { int n1=0, differ[Endch-Beginch+1], nmax=0, nmin=0, maxtemp, mintemp,temp; maxtemp=differ[0]; mintemp=differ[0]; for (int j = 1; j <= Endch-Beginch; j++) { temp=differ[j-1]; if(_copysign(temp,differ[j])!=differ[j-1] && differ[j]<0) n1=j+Beginch ; if(differ[j] if ((nmin-nmax)>0.8*fwhm && (nmin-nmax)<3*fwhm) return n1; else return (0); } 对称零面积法(推荐自动寻峰中采用,可探测弱峰和重峰) 面积为零的“窗”函数与实验谱数据进行褶积变换,且要求“窗”函数为对称函数。对线性基底的褶积变换将为零,只有存在峰的地方不为零。 j j m m j j m m j j i j i C C C y C y --=-=+=== ∑∑0 ' 匹配滤波器法(类峰形函数)∑-=-+--=m m k j k m j C ]2ex p[121]2ex p[22 22 σ σ 峰判定准则f data C data C y y R m m j j i j m m j j i j i i i >??? ? ??=?=∑∑-=+-=+2 12~~ 2m+1为变换宽度,6355.2FWHM =σ为峰宽参数,若变换后的y'和其均方根误差的比值超过预先给定的寻峰阈值(f ),则认为找到了一个峰。 峰位的确定:Ri 的正极值对应的道址;峰边界的确定:Ri 的正峰两边相邻的两个极小值之间的距离可以作为峰的宽度信息;半宽度:两过零截距。 CalculateArea(0, size, m, fwhm, area, R); for (int j = m; j <= size-m; j++) {if(area[j]>0&&R[j]>fh) for(int i=1;i<=m;i++) { if(area[j-i])>0&&area[j-i] if ((nmin2-nmin1)>0.6*fwhm && (nmin2-nmin1)<=2*fwhm) peakposition[p++]=j+0.5;//保持峰位对应的道址 } 协方差法(曲线拟合寻峰,计算机寻峰中采用,可分辨重峰,比较好的寻峰方法,但计算较为复杂,运算速度较慢) 1975年H.P.BLOK 等提出了一种新的寻峰方法,称为协方差法。用一个峰形函数与实验谱数据逐段拟合(一个高斯形函数与实验谱yi 的协方差) i j i j i b C y y +=+',Cj 为峰形/高斯函数)]/(773.2[EXP 2j H j C -=H 为峰FWHM ,y'i 为拟合峰高,bi 为本底常数(在峰区内假定不变)m j m <<- 2 2')(∑∑∑∑∑∑∑-=-=-=-=+-=-=+-=-- = m m j j j m m j j j m m j j m m j j i j m m j j j m m j j i j j m m j j i C g C g g y g C g y C g g y 用f C g C g g g y g C g y C g g y y R m m j j j m m j j j m m j j m m j j m m j j i j m m j j j m m j j i j j m m j j i i i >?? ??????????????--=?=∑∑∑∑∑∑∑∑-=-=-=-=-=+-=-=+-=2 122'')((f 判峰阈值)判定是否存在峰 Cj 通常为纯峰形函数?? ?????-=2)(2ln 4ex p H j C j 高斯函数:,H 为峰的FWHM gj 为各道计数的权重因子j i j j i j y H j g y g ++-= =])(2exp[1 4 或 参数选择:H 的取值最好与实验谱峰的半宽度接近,2m+1一般取2H 左右最好,f 一般取2~5 峰位确定:当Ri 为极大值对应的道址;峰边界确定: Ri 为负极大值处对应的道址 为了更好地分辨出落在一个强峰‘肩部’上的弱峰,可以在一个峰的左半部分和右半部分别计算R i 值,寻找相互靠得很近的组分峰。 线性拟合寻峰方法(适合于在峰区内分辨重峰) 吸取匹配滤波器方法的优点,同时用一阶导数法和线性拟合双重峰的技术来提高分辨重峰的能力,形成了一种新的寻峰方法,称为线性拟合寻峰方法。 Deconvolution method First the background is removed (if desired), then Markov spectrum is calculated (if desired), then the response function is generated according to given sigma and deconvolution is carried out. 可以提供多种算法,方便自行选择 总结 1.对于弱峰,数据光滑前,高斯乘积函数法和协方差法不能使用,若先光滑再找峰,又容易影响重叠峰的分辨;而导数法和对称零面积变换法,无论峰的统计质量如何,均可使用。 2.从统计假峰及高基底的抑制能力及重峰的分辨能力来看,一、三阶导数法和对称零面积变换法是较好的。对于一、三阶导数法,可先用适当多数据点的一阶导数法找峰,选取适当的灵敏度常数,以抑制假峰;然后用少点的三阶导数法(或用一阶导数法重复三次)检查是否有漏峰和重峰。对称零面积变换法同理。 3.从高基底的抑制能力和弱峰识别的准确度来看,对称零面积变换法最好。(在计算机自动找峰程序中,最好采用对称零面积变换法。) 参考资料 4.对找到的峰进行净面积判定是降低假峰出现几率的有效方法。当峰的净面积比峰的总面积(峰的净面积和本底面积之和)的标准偏差大若干倍时,才确认该峰是一个真峰,否则认为它是假峰,予以剔除。 峰的判弃主要是利用峰面积来进行判定真假峰。对于给定的灵敏因子S ,若峰的净面积为NetAREA ,峰的宽度为Width 。这些参数满足下式认为峰有意义,应保留,否则将找到的此峰丢弃。此式为: 21)/(Width AREA Width NetAREA S S 越大灵敏度越高,一般情况下S=3。 参考文献 SPECTRAN-F Version 2 Listings V olume.4 Common Subroutines and Data structures, CANBERRA Industries, Inc. 1980 能谱的数据处理(原文).doc M.A.Mariscotti, Nucl. Instr. Meth. 50 (1967) 309 Mariscotti Algorithm modified by Routti and Prussin: J.T.Routti and S.G.Prussin, Nucl. Instr. Meth. 72 (1969) 125 第一章算法概述 1.算法:解决问题的一种方法或过程;由若干条指令组成的有穷指令。 2.算法的性质: 1)输入:有零个或多个输入 2)输出:有至少一个输出 3)确定性:每条指令是清晰的、无歧义的 4)有限性:每条指令的执行次数和时间都是有限的 3.算法与程序的区别 程序是算法用某种程序设计语言的具体实现 程序可以不满足算法的有限性 4.算法复杂性分析 1)算法的复杂性是算法运行所需要的计算机资源的量,需要时间资源的量称为时间复 杂性,需要空间资源的量称为空间复杂性 2)三种时间复杂性:最坏情况、最好情况、平均情况 3)可操作性最好且最有实际价值的是最坏情况下的时间复杂性 第二章递归与分支策略 1.递归概念:直接或间接调用自身的算法 2.递归函数:用函数自身给出定义的函数 3.递归要素:边界条件、递归方程 4.递归的应用 ?汉诺塔问题 void Hanuo(int n,int a,int b,int c) { if(n==1) return; Hanuo(n-1,a,c,b); move(a,b) Hanuo(n-1,c,b,a); } ?全排列问题 void Perm(Type list[],int k,int m) { //产生list[k,m]的所有排列 if(k == m) { for(int i = 0;I <= m;i++) cout< 红外光谱图解析 一、分析红外谱图 (1)首先依据谱图推出化合物碳架类型,根据分子式计算不饱和度。 公式:不饱和度=F+1+(T-O)/2 其中: F:化合价为4价的原子个数(主要是C原子); T:化合价为3价的原子个数(主要是N原子); O:化合价为1价的原子个数(主要是H原子)。 F、T、O分别是英文4,3 1的首字母,这样记起来就不会忘了 举个例子:例如苯(C6H6),不饱和度=6+1+(0-6)/2=4,3个双键加一个环,正好为4个不饱和度。 (2)分析3300~2800cm^-1区域C-H伸缩振动吸收,以3000 cm^-1为界,高于3000cm^-1为不饱和碳C-H伸缩振动吸收,有可能为烯、炔、芳香化合物吗,而低于3000cm^-1一般为饱和C-H伸缩振动吸收。 (3)若在稍高于3000cm^-1有吸收,则应在2250~1450cm^-1频区,分析不饱和碳碳键的伸缩振动吸收特征峰,其中: 炔—2200~2100 cm^-1 烯—1680~1640 cm^-1 芳环—1600、1580、1500、1450 cm^-1 若已确定为烯或芳香化合物,则应进一步解析指纹区,即1000~650cm^-1的频区,以确定取代基个数和位置(顺反,邻、间、对)。 (4)碳骨架类型确定后,再依据其他官能团,如C=O,O-H,C-N 等特征吸收来判定化合物的官能团。 (5)解析时应注意把描述各官能团的相关峰联系起来,以准确判定官能团的存在,如2820、2720和1750~1700cm^-1的三个峰,说明醛基的存在。解析的过程基本就是这样吧,至于制样以及红外谱图软件的使用,一般的有机实验书上都有比较详细的介绍的。 二、记住常见常用的健值 1.烷烃 3000-2850 cm-1C-H伸缩振动 1465-1340 cm-1C-H弯曲振动 一般饱和烃C-H伸缩均在3000 cm-1以下,接近3000 cm-1的频率吸收。 2.烯烃 3100~3010 cm-1烯烃C-H伸缩 1675~1640 cm-1C=C伸缩 烯烃C-H面外弯曲振动(1000~675cm^1)。 3.炔烃 2250~2100 cm-1C≡C伸缩振动 3300 cm-1附近炔烃C-H伸缩振动 4.芳烃 3100~3000 cm-1芳环上C-H伸缩振动 1600~1450 cm-1C=C 骨架振动 880~680 cm-1C-H面外弯曲振动) 芳香化合物重要特征:一般在1600,1580,1500和1450 cm-1可能出现强度不等的4 本文从互联网收集并整理了推荐系统的架构,其中包括一些大公司的推荐系统框架(数据流存储、计算、模型应用),可以参考这些资料,取长补短,最后根据自己的业务需求,技术选型来设计相应的框架。后续持续更新并收集。。。 图1 界面UI那一块包含3块东西:1) 通过一定方式展示推荐物品(物品标题、缩略图、简介等);2) 给的推荐理由;3) 数据反馈改进个性化推荐;关于用户数据的存放地方:1)数据库/缓存用来实时取数据;2) hdfs文件上面; 抽象出来的三种推荐方式 图2 图3 图3中,推荐引擎的构建来源于不同的数据源(也就是用户的特征有很多种类,例如统计的、行为的、主题的)+不同的推荐模型算法,推荐引擎的架构可以试多样化的(实时推荐的+离线推荐的),然后融合推荐结果(人工规则+模型结果),融合方式多样的,有线性加权的或者切换式的等 图4 图4中,A模块负责用户各类型特征的收集,B模块的相关表是根据图3中的推荐引擎来生成的,B模块的输出推荐结果用来C模块的输入,中间经过过滤模块(用户已经产生行为的物品,非候选物品,业务方提供的物品黑名单等),排名模块也根据预设定的推荐目标来制定,最后推荐解释的生成(这是可能是最容易忽视,但很关键的一环,微信的好友推荐游戏,这一解释已经胜过后台的算法作用了) HULU的推荐系统 总结:这个也就跟图3有点类似了,葫芦的推荐系统,至少在他blog中写的比较简单。更多的是对推荐系统在线部分的一种描述,离线部分我猜想也是通过分布式计算或者不同的计算方式将算法产生的数据存储进入一种介质中,供推荐系统在线部分调用。系统的整个流程是这样的,首先获取用户的行为,包括(watch、subscribe、vote),这样行为会到后台获取show-show对应的推荐数据。同时这些行为也会产生对应的topic,系统也会根据topic 到后台获取topic-show对应的推荐数据。两种数据进行混合,然后经过fliter、explanation、ranking这一系列过程,最后生成用户看到的推荐数据。 淘宝的推荐系统(详细跟简单版) 能谱仪技术指标 1、技术指标: 1)*可靠性:可以配合各主流品牌的场发射扫描电镜使用,且在北京的地质行业有配合先 例,提供用户名单和联系方式; 2)探测器:硅漂移晶体,超薄窗口,完全独立真空;晶体有效面积不小于60 mm2,探头 整体有效采集面积不小于50mm2;适合低电压或小束流分析; 3)*探测器制冷和定位:采用三级帕尔贴制冷,最低工作温度可达零下80摄氏度;探头采 用马达控制的自动伸缩设计,可以在软件里实现控制,确保针对不同尺寸样品的定位精度; 4)元素分析范围Be4—U92; 5)免维护性:探头不包含冗余的前置放大电路板,随时可以断电,无需重新校正; 6)分辨率MnKa优于127eV,CKa优于56eV,F Ka优于64eV(20000CPS);在不同计数 率下谱峰稳定,分辨率衰减小于1eV; 7)输出最大计数率:大于500,000CPS谱峰无畸变,可处理最大计数率优于750,000CP S; 8)软件:64位能谱应用软件,操作简便界面清楚,直接读出电镜参数和仪器状态,结果 输出方便,适合于不同层次的用户尽快掌握; 9)谱定性分析:具备点、线、面扫描分析功能,高帽法扣除背景避免人为误差; 10)*谱定量分析:可对抛光表面或粗糙表面进行点、线和面的分析;具有虚拟标样法(间接 标样法)以及有标样法(直接标样法);可以方便的得到归一化和非归一化定量结果; 11)*谱峰稳定性:具备零峰设计,相对峰位稳定,无需铝铜双峰校准,保证数据重现性; 12)图像输出:支持BMP,TIFF, JPEG等流行的图像格式,对视场上任选区域进行能谱分析 和线、面扫描,可得到元素的线分布、常规面分布、快速面分布和定量面分布等,所支持电镜数字图像最大清晰度优于8192*8192,全息X射线成分图最大清晰度(live Spectrum Mapping)优于4096*4096. 13)*高级应用软件:针对地质领域,可以提供多视场自动叠加的数据拼接功能,实现大范 围面扫描和特征元素富集区域的自动分析; 14)图形处理器配置不低于:知名品牌,Intel Core i7-2600 处理器,8G以上内存,1TB硬 盘,DVD/RW 刻录光驱,24”平板液晶显示器,专用实验台等; 2、培训 要求卖方在用户现场进行技术培训,一年以后免费提供深入的技术培训课程,终生提供免费的应用咨询以及技术帮助 3、售后服务 3.1 安装:要求卖方到用户现场进行免费安装、调试、试运行。 3.2保修期1年 *3.3 国内有生产厂家独资建立的全套技术中心和演示实验室,探头返修或其它部件更换所无需返回原厂,节省时间和费用; *5.4 国内地质矿物行业近三年内有5台以上相同配置的销售业绩,需提供用户名单和联系方式 《算法分析与设计》试卷(A) (时间90分钟满分100分) 一、填空题(30分,每题2分)。 1.最长公共子序列算法利用的算法是( B )。 A、分支界限法 B、动态规划法 C、贪心法 D、回溯法2.在对问题的解空间树进行搜索的方法中,一个活结点最多有一次机会成为活结点的是( B ). A.回溯法 B.分支限界法 C.回溯法和分支限界法 D.回溯法求解子集树问题 3.实现最大子段和利用的算法是( B )。 A、分治策略 B、动态规划法 C、贪心法 D、回溯法4..广度优先是( A )的一搜索方式。 A、分支界限法 B、动态规划法 C、贪心法 D、回溯法5.衡量一个算法好坏的标准是( C )。 A 运行速度快 B 占用空间少 C 时间复杂度低 D 代码短 6.Strassen矩阵乘法是利用( A)实现的算法。 A、分治策略 B、动态规划法 C、贪心法 D、回溯法 7. 使用分治法求解不需要满足的条件是( A )。 A 子问题必须是一样的 B 子问题不能够重复 C 子问题的解可以合并 D 原问题和子问题使用相同的方法解 8.用动态规划算法解决最大字段和问题,其时间复杂性为( B ). A.logn B.n C.n2 D.nlogn 9.解决活动安排问题,最好用( B )算法 A.分治 B.贪心 C.动态规划 D.穷举 10.下面哪种函数是回溯法中为避免无效搜索采取的策略( B ) A.递归函数 B.剪枝函数C。随机数函数 D.搜索函数11. 从活结点表中选择下一个扩展结点的不同方式将导致不同的分支限界法,以下除( C )之外都是最常见的方式. A.队列式分支限界法 B.优先队列式分支限界法 C.栈式分支限界法 D.FIFO分支限界法 12. .回溯算法和分支限界法的问题的解空间树不会是( D ). A.有序树 B.子集树 C.排列树 D.无序树 13.优先队列式分支限界法选取扩展结点的原则是( C )。 A、先进先出 B、后进先出 C、结点的优先级 D、随机14.下面是贪心算法的基本要素的是( C )。 A、重叠子问题 B、构造最优解 C、贪心选择性质 D、定义最优解15.回溯法在解空间树T上的搜索方式是( A ). A.深度优先 B.广度优先 C.最小耗费优先 D.活结点优先 二、填空题(20分,每空1分)。 1.算法由若干条指令组成的又穷序列,且满足输入、输出、 确定性和有限性四个特性。 2.分支限界法的两种搜索方式有队列式(FIFO)分支限界法、优先队列式分支限界法,用一个队列来存储结点的表叫活节点表。 个性化推荐系统研究综述 【摘要】个性化推荐系统不仅在社会经济中具有重要的应用价值,而且也是一个非常值得研究的科学问题。给出个性化推荐系统的定义,国内外研究现状,同时阐述了推荐系统的推荐算法。最后对个性化推系统做出总结与展望。 【关键词】推荐系统;推荐算法;个性化 1.个性化推荐系统 1.1个性化推荐系统的概论 推荐系统是一种特殊形式的信息过滤系统(Information Filtering),推荐系统通过分析用户的历史兴趣和偏好信息,可以在项目空间中确定用户现在和将来可能会喜欢的项目,进而主动向用户提供相应的项目推荐服务[1]。传统推荐系统认为推荐系统通过获得用户个人兴趣,根据推荐算法,并对用户进行产品推荐。事实上,推荐系统不仅局限于单向的信息传递,还可以同时实现面向终端客户和面向企业的双向信息传递。 一个完整的推荐系统由3个部分组成:收集用户信息的行为记录模块,分析用户喜好的模型分析模块和推荐算法模块,其中推荐算法模块是推荐系统中最为核心的部分。推荐系统把用户模型中兴趣需求信息和推荐对象模型中的特征信息匹配,同时使用相应的推荐算法进行计算筛选,找到用户可能感兴趣的推荐对象,然后推荐给用户。 1.2国内外研究现状 推荐系统的研宄开始于上世纪90年代初期,推荐系统大量借鉴了相关领域的研宄成果,在推荐系统的研宄中广泛应用了认知科学、近似理论、信息检索、预测理论、管理科学以及市场建模等多个领域的知识。随着互联网的普及和电子商务的发展,推荐系统逐渐成为电子商务IT技术的一个重要研究内容,得到了越来越多研究者的关注。ACM从1999年开始每年召开一次电子商务的研讨会,其中关于电子商务推荐系统的研究文章占据了很大比重。个性化推荐研究直到20世纪90年代才被作为一个独立的概念提出来。最近的迅猛发展,来源于Web210技术的成熟。有了这个技术,用户不再是被动的网页浏览者,而是成为主动参与者[2]。 个性化推荐系统的研究内容和研究方向主要包括:(1)推荐系统的推荐精度和实时性是一对矛盾的研究;(2)推荐质量研究,例如在客户评价数据的极端稀疏性使得推荐系统无法产生有效的推荐,推荐系统的推荐质量难以保证;(3)多种数据多种技术集成性研究;(4)数据挖掘技术在个性化推荐系统中的应用问题,基于Web挖掘的推荐系统得到了越来越多研究者的关注;(5)由于推荐系统需要分析用户购买习惯和兴趣爱好,涉及到用户隐私问题,如何在提供推荐服务的 一、填空题(20分) 1.一个算法就是一个有穷规则的集合,其中之规则规定了解决某一特殊类型问题的一系列运算,此外,算法还应具有以下五个重要特性:_________,________,________,__________,__________。 2.算法的复杂性有_____________和___________之分,衡量一个算法 好坏的标准是______________________。 3.某一问题可用动态规划算法求解的显著特征是 ____________________________________。 4.若序列X={B,C,A,D,B,C,D},Y={A,C,B,A,B,D,C,D},请给出序列X 和Y的一个最长公共子序列_____________________________。 5.用回溯法解问题时,应明确定义问题的解空间,问题的解空间至少应包含___________。 6.动态规划算法的基本思想是将待求解问题分解成若干____________,先求解___________,然后从这些____________的解得到原问题的解。 7.以深度优先方式系统搜索问题解的算法称为_____________。 8.0-1背包问题的回溯算法所需的计算时间为_____________,用动态规划算法所需的计算时间为____________。 9.动态规划算法的两个基本要素是___________和___________。 10.二分搜索算法是利用_______________实现的算法。 二、综合题(50分) 1.写出设计动态规划算法的主要步骤。 2.流水作业调度问题的johnson算法的思想。 3.若n=4,在机器M1和M2上加工作业i所需的时间分别为a i和b i,且(a1,a2,a3,a4)=(4,5,12,10),(b1,b2,b3,b4)=(8,2,15,9)求4个作业的最优调度方案,并计算最优值。 4.使用回溯法解0/1背包问题:n=3,C=9,V={6,10,3},W={3,4,4},其解空间有长度为3的0-1向量组成,要求用一棵完全二叉树表示其解空间(从根出发,左1右0),并画出其解空间树,计算其最优值及最优解。 5.设S={X1,X2,···,X n}是严格递增的有序集,利用二叉树的结点来存储S中的元素,在表示S的二叉搜索树中搜索一个元素X,返回的结果有两种情形,(1)在二叉搜索树的内结点中找到X=X i,其概率为b i。(2)在二叉搜索树的叶结点中确定X∈(X i,X i+1),其概率为a i。在表示S的二叉搜索树T中,设存储元素X i的结点深度为C i;叶结点(X i,X i+1)的结点深度为d i,则二叉搜索树T的平均路长p为多少?假设二叉搜索树T[i][j]={X i,X i+1,···,X j}最优值为m[i][j],W[i][j]= a i-1+b i+···+b j+a j,则m[i][j](1<=i<=j<=n)递归关系表达式为什么? 6.描述0-1背包问题。 三、简答题(30分) 1.流水作业调度中,已知有n个作业,机器M1和M2上加工作业i所需的时间分别为a i和b i,请写出流水作业调度问题的johnson法则中对a i和b i的排序算法。(函数名可写为sort(s,n)) 算法分析与设计 学习总结 题目:算法分析与设计学习总结 学院信息科学与工程学院专业2013级计算机应用技术 届次 学生姓名 学号2013110657 二○一三年一月十五日 算法分析与设计学习总结 本学期通过学习算法分析与设计课程,了解到:算法是一系列解决问题的清晰指令,代表着用系统的方法描述解决问题的策略机制。算法能够对一定规范的输入,在有限时间内获得所要求的输出。如果一个算法有缺陷,或不适合某个问题,执行这个算法将不会解决这个问题。不同的算法可能用不同的时间、空间或效率来完成同样的任务。一个算法的优劣可以用空间复杂性和时间复杂度来衡量。算法可以使用自然语言、伪代码、流程图等多种不同的方法来描述。计算机系统中的操作系统、语言编译系统、数据库管理系统以及各种各样的计算机应用系统中的软件,都必须使用具体的算法来实现。算法设计与分析是计算机科学与技术的一个核心问题。 设计的算法要具有以下的特征才能有效的完成设计要求,算法的特征有:(1)有穷性。算法在执行有限步后必须终止。(2)确定性。算法的每一个步骤必须有确切的定义。(3)输入。一个算法有0个或多个输入,作为算法开始执行前的初始值,或初始状态。(4)输出。一个算法有一个或多个输出,以反映对输入数据加工后的结果。没有输出的算法是毫无意义的。 (5)可行性。在有限时间内完成计算过程。 算法设计的整个过程,可以包含对问题需求的说明、数学模型的拟制、算法的详细设计、算法的正确性验证、算法的实现、算法分析、程序测试和文档资料的编制。算法可大致分为基本算法、数据结构的算法、数论与代数算法、计算几何的算法、图论的算法、动态规划以及数值分析、加密算法、排序算法、检索算法和并行算法。 经典的算法主要有: 1、穷举搜索法 穷举搜索法是对可能是解的众多候选解按某种顺序进行逐一枚举和检验,bing从中找出那些符合要求的候选解作为问题的解。 穷举算法特点是算法简单,但运行时所花费的时间量大。有些问题所列举书来的情况数目会大得惊人,就是用高速计算机运行,其等待运行结果的时间也将使人无法忍受。我们在用穷举算法解决问题是,应尽可能将明显不符合条件的情况排除在外,以尽快取得问题的解。 2、迭代算法 迭代法是数值分析中通过从一个初始估计出发寻找一系列近似解来解决问题(一般是解方程或方程组)的过程,为实现这一过程所使用的方法统称为迭代法。迭代法是用于求方程或方程组近似根的一种常用的算法设计方法。设方程为f(x)=0,用某种数学方法导出等价的形式x=g(x),然后按以下步骤执行: (1)选一个方程的近似根,赋给变量x0。 (2)将x0的值保存于变量x1,然后计算g(x1),并将结果存于变量x0。 (3)当x0与x1的差的绝对值还小于指定的精度要求时,重复步骤(2)的计算。 若方程有根,并且用上述方法计算出来的近似根序列收敛,则按上述方法求得的x0就认为是方程的根。 3、递推算法 递推算法是利用问题本身所具有的一种递推关系求问题解的一种方法。它把问题分成若干步,找出相邻几步的关系,从而达到目的。 4、递归算法 递归算法是一种直接或间接的调用自身的算法。 能采用递归描述的算法通常有这样的特征:为求解规模为n的问题,设法将它分解成规模较小的问题,然后从这些小问题的解方便地构造出大问题的解,并且这些规模较小的问题也能采用同样的分解和综合方法,分解成规模更小的问题,并从这些更小问题的解构造出规模 注:JHD为溶剂本身的其他1H对与之相对应的1H之间的耦合常数,JCD为溶剂本身1H对13C的耦合常数,H2O和交换了D的HOD上的1H产生的即水峰的化学位移 氯仿:小、中小、中等极性 DMSO:芳香系统(日光下自然显色、紫外荧光)。对于酚羟基能够出峰。芳香化合物还是芳香甙,都为首选。 吡啶:极性大的,特别是皂甙 对低、中极性的样品,最常采用氘代氯仿作溶剂,因其价格远低于其它氘代试剂。极性大的化合物可采用氘代丙酮、重水等。 针对一些特殊的样品,可采用相应的氘代试剂:如氘代苯(用于芳香化合物、芳香高聚物)、氘代二甲基亚砜(用于某些在一般溶剂中难溶的物质)、氘代吡啶(用于难溶的酸性或芳香化合物)等。 丙酮:中等极性 甲醇:极性大 氯仿—甲醇: 石:乙 5;1小极性 石:丙 2:1——1:1中等极性 氯仿:甲醇6:1极性以上含有一个糖 2:1 含有两个糖 含有糖的三萜皂甙:一般用吡啶 常见溶剂的化学位移 常见溶剂的1H在不同氘代溶剂中的化学位移值 常见溶剂的化学位移 常见溶剂的13C在不同氘代溶剂中的化学位移值 核磁知识(NMR) 一:样品量的选择 氢谱,氟谱,碳谱至少需要5mg. 1H-1H COSY, 1H-1H NOESY, 1H-13C HMBC, 1H-13C HSQC需要10-15mg. 碳谱需要30mg. 二:如何选择氘代溶剂 常用氘代溶剂: CDCl3, DMSO, D2O, CD3OD.特殊氘代溶剂: CD3COCD3, C6D6, CD3CN。 极性较大的化合物可以选择用D2O或CD3OD,如果想要观察活泼氢切记不能选择D2O和CD3OD。 CDCl3为人民币2-3元,D2O为人民币6元,DMSO为人民币10元,CD3OD为人民币30元。 Solvent 化学位移(ppm) 水峰位移(ppm) CDCl3 DMSO CD3OD D2O CD3COCD3 红外谱图分析(一) 基团频率和特征吸收峰 物质的红外光谱,是其分子结构的反映,谱图中的吸收峰,与分子中各基团的振动形式相对应。多原子分子的红外光谱与其结构的关系,一般是通过实验手段得到的。这就是通过比较大量已知化合物的红外光谱,从中总结出各种基团的吸收规律来。实验表明,组成分子的各种基团,如O—H、N—H、C—H、C═C、C≡C、C═O等,都有自己特定的红外吸收区域,分子其它部分对其吸收位置影响较小。通常把这种能代表基团存在、并有较高强度的吸收谱带称为基团频率,其所在的位置一般又称为特征吸收峰。 根据化学键的性质,结合波数与力常数、折合质量之间的关系,可将红外4 000~400 cm-1划分为四个区:4 000~2 500 cm-1 氢键区 2 500~2 000 cm-1 产生吸收基团有O—H、C—H、N—H; 叁键区 2 000~1 500 cm-1 C≡C、C≡N、C═C═C 双键区 1 500~1 000 cm-1 C═C、C═O等 单键区 按吸收的特征,又可划分为官能团区和指纹区。 一、官能团区和指纹区 红外光谱的整个围可分成4 000~1 300 cm-1与1 300~600 cm-1两个区域。 4 000~1 300 cm-1区域的峰是由伸缩振动产生的吸收带。由于基团的特征吸收峰一般位于高频围,并且在 该区域,吸收峰比较稀疏,因此,它是基团鉴定工作最有价值的区域,称为官能团区。 在1 300~600 cm-1区域中,除单键的伸缩振动外,还有因变形振动产生的复杂光谱。当分子结构稍有不同时,该区的吸收就有细微的差异。这种情况就像每个人都有不同的指纹一样,因而称为指纹区。指纹区 对于区别结构类似的化合物很有帮助。 指纹区可分为两个波段 (1)1 300~900 cm-1这一区域包括C—O,C—N,C—F,C—P,C—S,P—O,Si—O等键的伸缩振 动和C═S,S═O,P═O等双键的伸缩振动吸收。 Xiaol v2009-Relevance is more significant than correlation: Information filtering on sparse data 本文提出了在针对数据稀疏时,使用相关性信息比关联性信息效果更好,因为在关联性信息中,会用到更多的数据, Recommendation System 推荐系统存在的主要挑战: 1.Data sparsity. 2.Scalability 解决该问题的一般方法(28-30) a)有必要考虑计算成本问题和需找推荐算法,这些算法要么是小点的要求 或易于并行化(或两者) b)使用基于增量的算法,随着数据的增加,不重新计算所有的数据,而是 微调的进行 3.Cold start 解决该问题的方法一般有 a)使用混合推荐技术,结合content和collaborative数据,或者需 要基础信息的使用比如用户年龄、位置、喜好genres(31、32) b)识别不同web服务上的单独用户。比如Baifendian开发了一个可以 跟踪到单独用户在几个电子商务网站上的活动,所以对于在网站A的一 个冷启动用户,我们可以根据他在B,C,D网站上的记录来解决其冷启 动问题。 4.Diversity vs. Accuracy(多样性和精确性) 将一些很受欢迎的且高评分的商品推荐给一个用户时,推荐非常高效,但是这种推荐不起多少作用,因为这些商品可以很容易的找到。因此一个好的推荐商 品的列表应该包含一些不明显的不容易被该用户自己搜索到的商品。解决该问题 的方法主要是提高推荐列表的多样性,以及使用混合推荐方法。(34-37) 5.Vulnerability to attacks 6.The value of time. 7.Evaluation of recommendations 8.er interface. 除了这些问题外,还有其他的。随着相关学科分支的出现,特别是网络分析工具,科学家考虑网络结构对推荐的效果影响,以及如何有效使用已知的结构属性来提 高推荐。比如,(45)分析了消费者-商品网络并提出了一个基于喜好边(preferring edges)改进的推荐算法,该算法提高了局部聚类属性。(46)设计并提高了算法,该算法充分利用了社区结构(community structure)。随之而来的挑战主要有:带有GPS移动手机成为主流,并且可以访问网络,因此,基于位置的推荐更需要精确的推荐,其需要对人的移动有一个高效预测能力(47、48)并且高质量的定义位置和人之间的相似性的方法。(49、50)。智能推荐系统需考虑不同人的不同行为模式。比如新用户比较喜欢访问popular商品并且选择相似的商品,而老的用户有更不同的喜好(51,52)用户行为在低风险商品和高风险商品之间更加的不同。(53,54) 推荐系统的一些概念 网络 网络分析对于复杂系统的组织原则的发现是一个万能的工具(5-9)。网络是 由一些元素点和连接点的边组成的。点即为个人或者组织,边为他们之间的交互。 网络G可用(V,E)表示,V(vertice)为节点的集合,E为边(edge)的 集合。在无向网络中,边无方向。在有向网络中,边有向。我们假设网络中不存 在回路以及两个节点之间不存在多条边。G(V,E)图中,一些参数表示是指与节点x连接的节点(即x的邻居)的集合。 即为x节点的度。 《并行算法》课程总结与复习 Ch1 并行算法基础 1.1 并行计算机体系结构 并行计算机的分类 ?SISD,SIMD,MISD,MIMD; ?SIMD,PVP,SMP,MPP,COW,DSM 并行计算机的互连方式 ?静态:LA(LC),MC,TC,MT,HC,BC,SE ?动态:Bus, Crossbar Switcher, MIN(Multistage Interconnection Networks) 1.2 并行计算模型 PRAM模型:SIMD-SM, 又分CRCW(CPRAM,PPRAM,APRAM),CREW,EREW SIMD-IN模型:SIMD-DM 异步APRAM模型:MIMD-SM BSP模型:MIMD-DM,块内异步并行,块间显式同步 LogP模型:MIMD-DM,点到点通讯 1.3 并行算法的一般概念 并行算法的定义 并行算法的表示 并行算法的复杂度:运行时间、处理器数目、成本及成本最优、加速比、并行效率、工作量 并行算法的WT表示:Brent定理、WT最优 加速比性能定律 并行算法的同步和通讯 Ch2 并行算法的基本设计技术 基本设计技术 平衡树方法:求最大值、计算前缀和 倍增技术:表序问题、求森林的根 分治策略:FFT分治算法 划分原理: 均匀划分(PSRS排序)、对数划分(并行归并排序)、方根划分(Valiant归并排序)、功能划分( (m,n)-选择) 流水线技术:五点的DFT计算 Ch3 比较器网络上的排序和选择算法 3.1 Batcher归并和排序 0-1原理的证明 奇偶归并网络:计算流程和复杂性(比较器个数和延迟级数) 双调归并网络:计算流程和复杂性(比较器个数和延迟级数) Batcher排序网络:原理、种类和复杂性 3.2 (m, n)-选择网络 分组选择网络 平衡分组选择网络及其改进 Ch4 排序和选择的同步算法 4.1 一维线性阵列上的并行排序算法 4.2 二维Mesh上的并行排序算法 ShearSort排序算法 Thompson&Kung双调排序算法及其计算示例 4.3 Stone双调排序算法 4.4 Akl并行k-选择算法:计算模型、算法实现细节和时间分析 4.5 Valiant并行归并算法:计算模型、算法实现细节和时间分析 4.7 Preparata并行枚举排序算法:计算模型和算法的复杂度 Ch5 排序和选择的异步和分布式算法 5.1 MIMD-CREW模型上的异步枚举排序算法 5.2 MIMD-TC模型上的异步快排序算法 5.3分布式k-选择算法 Ch6 并行搜索 6.1 单处理器上的搜索 6.2 SIMD共享存储模型上有序表的搜索:算法 6.3 SIMD共享存储模型上随机序列的搜索:算法 6.4 树连接的SIMD模型上随机序列的搜索:算法 6.5 网孔连接的SIMD模型上随机序列的搜索:算法和计算示例 Ch8 数据传输与选路 8.1 引言 信包传输性能参数 维序选路(X-Y选路、E-立方选路) 选路模式及其传输时间公式 8.2 单一信包一到一传输 SF和CT传输模式的传输时间(一维环、带环绕的Mesh、超立方) 8.3 一到多播送 SF和CT传输模式的传输时间(一维环、带环绕的Mesh、超立方)及传输方法8.4 多到多播送 SF和CT传输模式的传输时间(一维环、带环绕的Mesh、超立方)及传输方法8.5 贪心算法(书8.2) 二维阵列上的贪心算法 蝶形网上的贪心算法 8.6 随机和确定的选路算法(书8.3) Ch12矩阵运算 红外谱图解析基本知识 基团频率区 中红外光谱区可分成4000 cm-1 ~1300(1800)cm-1和1800 (1300 )cm-1 ~ 600 cm-1两个区域。最有分析价值的基团频率在4000 cm-1 ~ 1300 cm-1 之间,这一区域称为基团频率区、官能团区或特征区。区内的峰是由伸缩振动产生的吸收带,比较稀疏,容易辨认,常用于鉴定官能团。 在1800 cm-1 (1300 cm-1 )~600 cm-1 区域内,除单键的伸缩振动外,还有因变形振动产生的谱带。这种振动基团频率和特征吸收峰与整个分子的结构有关。当分子结构稍有不同时,该区的吸收就有细微的差异,并显示出分子特征。这种情况就像人的指纹一样,因此称为指纹区。指纹区对于指认结构类似的化合物很有帮助,而且可以作为化合物存在某种基团的旁证。 基团频率区可分为三个区域 (1) 4000 ~2500 cm-1 X-H伸缩振动区,X可以是O、N、C或S等原子。 O-H基的伸缩振动出现在3650 ~3200 cm-1 范围内,它可以作为判断有无醇类、酚类和有机酸类的重要依据。 当醇和酚溶于非极性溶剂(如CCl4),浓度于0.01mol. dm-3时,在3650 ~3580 cm-1 处出现游离O-H基的伸缩振动吸收,峰形尖锐,且没有其它吸收峰干扰,易于识别。当试样浓度增加时,羟基化合物产生缔合现象,O-H基的伸缩振动吸收峰向低波数方向位移,在3400 ~3200 cm-1 出现一个宽而强的吸收峰。 胺和酰胺的N-H伸缩振动也出现在3500~3100 cm-1 ,因此,可能会对O-H伸缩振动有干扰。 C-H的伸缩振动可分为饱和和不饱和的两种: 饱和的C-H伸缩振动出现在3000 cm-1以下,约3000~2800 cm-1 ,取代基对它们影响很小。如-CH3 基的伸缩吸收出现在2960 cm-1和2876 cm-1附近;R2CH2基的吸收在2930 cm-1 和2850 cm-1附近;R3CH基的吸收基出现在2890 cm-1 附近,但强度很弱。 不饱和的C-H伸缩振动出现在3000 cm-1以上,以此来判别化合物中是否含有不饱和的C-H键。 苯环的C-H键伸缩振动出现在3030 cm-1附近,它的特征是强度比饱和的C-H浆键稍弱,但谱带比较尖锐。 不饱和的双键=C-H的吸收出现在3010~3040 cm-1范围内,末端= CH2的吸收出现在3085 cm-1附近。 叁键oCH上的C-H伸缩振动出现在更高的区域(3300 cm-1 )附近。 (2) 2500~1900 cm-1为叁键和累积双键区,主要包括-CoC、-CoN等叁键的伸缩振动,以及-C =C=C、-C=C=O等累积双键的不对称性伸缩振动。 对于炔烃类化合物,可以分成R-CoCH和R¢-C oC-R两种类型: R-CoCH的伸缩振动出现在2100~2140 cm-1附近; R¢-C oC-R出现在2190~2260 cm-1附近; R-C oC-R分子是对称,则为非红外活性。 -C oN 基的伸缩振动在非共轭的情况下出现2240~2260 cm-1附近。当与不饱和键或芳香核共轭时,该峰位移到2220~2230 cm-1附近。若分子中含有C、H、N原子,-C oN基吸收比较强而尖锐。若分子中含有O原子,且O原子离-C oN基越近,-C oN基的吸收越弱,甚至观察不到。 基于内容推荐方法的优点是: 1)不需要其它用户的数据,没有冷开始问题和稀疏问题。 2)能为具有特殊兴趣爱好的用户进行推荐。 3)能推荐新的或不是很流行的项目,没有新项目问题。 4)通过列出推荐项目的内容特征,可以解释为什么推荐那些项目。 5)已有比较好的技术,如关于分类学习方面的技术已相当成熟。 缺点是要求内容能容易抽取成有意义的特征,要求特征内容有良好的结构性,并且用户的口味必须能够用内容特征形式来表达,不能显式地得到其它用户的判断情况。 二、协同过滤推荐 协同过滤推荐(Collaborative Filtering Recommendation)技术是推荐系统中应用最早和最为成功的技术之一。它一般采用最近邻技术,利用用户的历史喜好信息计算用户之间的距离,然后利用目标用户的最近邻居用户对商品评价的加权评价值来预测目标用户对特定商品的喜好程度,系统从而根据这一喜好程度来对目标用户进行推荐。协同过滤最大优点是对推荐对象没有特殊的要求,能处理非结构化的复杂对象,如音乐、电影。 协同过滤是基于这样的假设:为一用户找到他真正感兴趣的内容的好方法是首先找到与此用户有相似兴趣的其他用户,然后将他们感兴趣的内容推荐给此用户。其基本思想非常易于理解,在日常生活中,我们往往会利用好朋友的推荐来进行一些选择。协同过滤正是把这一思想运用到电子商务推荐系统中来,基于其他用户对某一内容的评价来向目标用户进行推荐。 基于协同过滤的推荐系统可以说是从用户的角度来进行相应推荐的,而且是自动的,即用户获得的推荐是系统从购买模式或浏览行为等隐式获得的,不需要用户努力地找到适合自己兴趣的推荐信息,如填写一些调查表格等。 和基于内容的过滤方法相比,协同过滤具有如下的优点: 1)能够过滤难以进行机器自动内容分析的信息,如艺术品,音乐等。 2)共享其他人的经验,避免了内容分析的不完全和不精确,并且能够基于一些复杂的,难以表述的概念(如信息质量、个人品味)进行过滤。 3)有推荐新信息的能力。可以发现内容上完全不相似的信息,用户对推荐信息的内容事先是预料不到的。这也是协同过滤和基于内容的过滤一个较大的差别,基于内容的过滤推荐很多都是用户本 推荐系统的出现 推荐系统的任务就是解决,当用户无法准确描述自己的需求时,搜索引擎的筛选效果不佳的问题。联系用户和信息,一方面帮助用户发现对自己有价值的信息,另一方面让信息能够展现在对他感兴趣的人群中,从而实现信息提供商与用户的双赢。 推荐算法介绍 基于人口统计学的推荐 这是最为简单的一种推荐算法,它只是简单的根据系统用户的基本信息发现用户的相关程度,然后将相似用户喜爱的其他物品推荐给当前用户。 系统首先会根据用户的属性建模,比如用户的年龄,性别,兴趣等信息。根据这些特征计算用户间的相似度。比如系统通过计算发现用户A和C比较相似。就会把A喜欢的物品推荐给C。 优缺点: ?不需要历史数据,没有冷启动问题 ?不依赖于物品的属性,因此其他领域的问题都可无缝接入。 ?算法比较粗糙,效果很难令人满意,只适合简单的推荐 基于内容的推荐 与上面的方法相类似,只不过这次的中心转到了物品本身。使用物品本身的相似度而不是用户的相似度。 系统首先对物品(图中举电影的例子)的属性进行建模,图中用类型作为属性。 在实际应用中,只根据类型显然过于粗糙,还需要考虑演员,导演等更多信息。 通过相似度计算,发现电影A和C相似度较高,因为他们都属于爱情类。系统还会发现用户A喜欢电影A,由此得出结论,用户A很可能对电影C也感兴趣。 于是将电影C推荐给A。 优缺点: ?对用户兴趣可以很好的建模,并通过对物品属性维度的增加,获得更好的推荐精度 ?物品的属性有限,很难有效的得到更多数据 ?物品相似度的衡量标准只考虑到了物品本身,有一定的片面性 ?需要用户的物品的历史数据,有冷启动的问题 协同过滤 协同过滤是推荐算法中最经典最常用的,分为基于用户的协同过滤和基于物品的协同过滤。那么他们和基于人口学统计的推荐和基于内容的推荐有什么区别和联系呢? 基于用户的协同过滤——基于人口统计学的推荐 基于用户的协同过滤推荐机制和基于人口统计学的推荐机制都是计算用户的相似度,并基于“邻居”用户群计算推荐,但它们所不同的是如何计算用户的相似度,基于人口统计学的机制只考虑用户本身的特征,而基于用户的协同过滤机制可是在用户的历史偏好的数据上计算用户的相似度,它的基本假设是,喜欢类似物品的用户可能有相同或者相似的口味和偏好。 基于物品的协同过滤——基于内容的推荐 第一章概述 算法的概念:算法是指解决问题的一种方法或过程,是由若干条指令组成的有穷序列。 算法的特征: 可终止性:算法必须在有限时间内终止; 正确性:算法必须正确描述问题的求解过程; 可行性:算法必须是可实施的; 算法可以有0个或0个以上的输入; 算法必须有1个或1个以上的输出。 算法与程序的关系: 区别:程序可以不一定满足可终止性。但算法必须在有限时间内结束; 程序可以没有输出,而算法则必须有输出; 算法是面向问题求解的过程描述,程序则是算法的实现。 联系:程序是算法用某种程序设计语言的具体实现; 程序可以不满足算法的有限性性质。 算法描述方式:自然语言,流程图,伪代码,高级语言。 算法复杂性分析: 算法复杂性的高低体现运行该算法所需计算机资源(时间,空间)的多少。 算法复杂性度量: 期望反映算法本身性能,与环境无关。 理论上不能用算法在机器上真正的运行开销作为标准(硬件性能、代码质量影响)。 一般是针对问题选择基本运算和基本存储单位,用算法针对基本运算与基本存储单位的开销作为标准。 算法复杂性C依赖于问题规模N、算法输入I和算法本身A。即C=F(N, I, A)。 第二章递归与分治 分治法的基本思想: 求解问题算法的复杂性一般都与问题规模相关,问题规模越小越容易处理。 分治法的基本思想是,将一个难以直接解决的大问题,分解为规模较小的相同子问题,直至这些子问题容易直接求解,并且可以利用这些子问题的解求出原问题的解。各个击破,分而治之。 分治法产生的子问题一般是原问题的较小模式,这就为使用递归技术提供了方便。递归是分治法中最常用的技术。 使子问题规模大致相等的做法是出自一种平衡(balancing)子问题的思想,它几乎总是比子问题规模不等的做法要好。 分治法所能解决的问题一般具有以下几个特征: 该问题的规模缩小到一定的程度就可以容易地解决; 该问题可以分解为若干个规模较小的相同问题,即该问题具有最优子结构性质; 利用该问题分解出的子问题的解可以合并为该问题的解; 该问题所分解出的各个子问题是相互独立的,即子问题之间不包含公共的子问题。(这条特征涉及到分治法的效率,如果各子问题是不独立的,则分治法要做许多不必要的工作,重复地解公共的子问题,此时虽然也可用分治法,但一般用动态规划较好。) 递归的概念: 如何分析红外谱图 (1)首先依据谱图推出化合物碳架类型:根据分子式计算不饱和度,公式:不饱和度(Ω)= 1+F+(T-O)/2 其中,F:化合价为4价的原子个数(主要是C原子);T:化合价为3价的原子个数(主要是N原子);O:化合价为1价的原子个数(主要是H原子)。例如:比如苯:C6H6,不饱和度=6+1+(0-6)/2=4,3个双键加一个环,正好为4个不饱和度; (2)分析3300~2800 cm-1区域C-H伸缩振动吸收;以3000 cm-1为界:高于3000 cm-1为不饱和碳C-H伸缩振动吸收,有可能为烯,炔,芳香化合物,而低于3000 cm-1一般为饱和C-H伸缩振动吸收; 3)若在稍高于3000 cm-1有吸收,则应在2250~1450 cm-1频区,分析不饱和碳碳键的伸缩振动吸收特征峰,其中: 炔2200~2100 cm-1;烯1680~1640 cm-1;芳环1600, 1580, 1500, 1450 cm-1 若已确定为烯或芳香化合物,则应进一步解析指纹区,即1000~650 cm-1的频区,以确定 取代基个数和位置(顺反,邻、间、对); (4)碳骨架类型确定后,再依据其他官能团,如C=O, O-H, C-N 等特征吸收来判定化合物的官能团; (5)解析时应注意把描述各官能团的相关峰联系起来,以准确判定官能团的存在,如2820,2720和1750~1700 cm-1的三个峰,说明醛基的存在。 常用健值: a. 烷烃:C-H伸缩振动(3000-2850 cm-1);C-H弯曲振动(1465-1340 cm-1);一般饱和烃C-H伸缩均在3000 cm-1以下,接近3000 cm-1的频率吸收; b. 烯烃:烯烃C-H伸缩(3100~3010 cm-1);C=C伸缩(1675~1640 cm-1);烯烃C-H面外弯曲振动(1000~675 cm-1); c. 炔烃:伸缩振动(2250~2100 cm-1);炔烃C-H伸缩振动(3300 cm-1附近); d.芳烃:3100~3000 cm-1 芳环上C-H伸缩振动;1600~1450 cm-1 C=C 骨架振动。 2. 推测C4H8O2的结构 解:1)Ω=1-8/2+4=1 2)峰归属 3)可能的结构H C O2CH2CH3 O H3C C O2CH3 O H3CH2C C O CH3 O 1180 1240 1160算法分析与设计总结
红外图谱分析方法大全
推荐系统的架构
能谱仪技术指标
算法分析与设计试卷
个性化推荐系统研究综述
算法设计与分析复习题及答案
算法设计与分析学习总结
NMR常见溶剂峰和水峰
红外谱图峰位分析方法
推荐系统总结
《并行算法》课程总结与复习
红外谱图解析基本知识
推荐系统中常用算法 以及优点缺点对比
推荐系统的常用算法原理和实现
算法分析与设计知识点总结
如何分析红外谱图
相关主题
文本预览